Изобретение относится к робототехнике и может быть использовано при конструировании промышленных роботов и манипуляторов универсального назначения с повышенной точностью позиционирования выходного звена.
Целью изобретения является повышение точности позиционирования ведомого звена шарнира относительно его ведущего за счет устранения боковых зазоров в волновом зубчатом зацеплении.
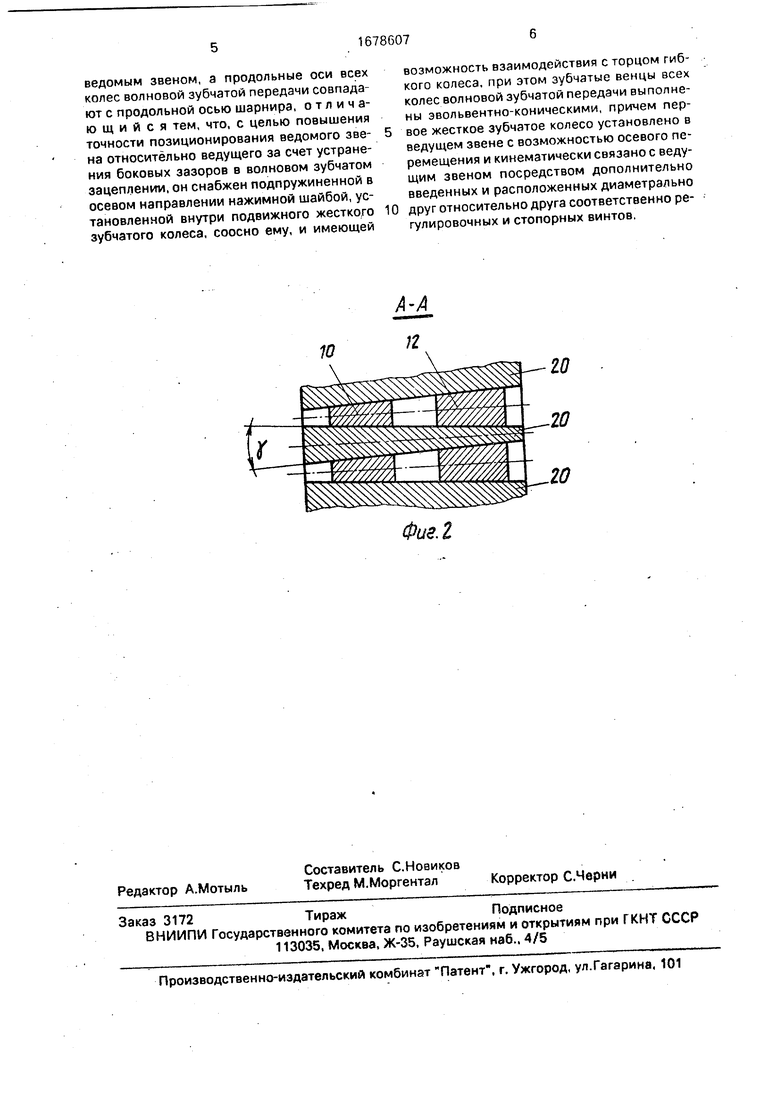
На фиг. 1 показан шарнир, общий вид, разрез; на фиг. 2 - разрез А-А на фиг, 1.
Шарнир манипулятора состоит из двух звеньев - ведущего звена 1 и ведомого звена 2. причем вращение от одного звена к другому передается с редукцией с помощью мотор-редуктора 3, оснащенного волновой зубчатой передачей 4. Волновая зубчатая передача 4 имеет волнообразователь 5, од- новенцовое короткое гибкое колесо 6 и два жестких колеса 7 и 8. Колесо 7 жестко связано с выходным валом 9 ведущего звена, а колесо 8 установлено подвижно в осевом направлении внутри ведущего звена 1. Внутренний зубчатый венец 10 колеса 8 образует с зубчатым венцом 11 гибкого колеса 6 зубчатое люфтовое соединение (т. е. их числа зубьев равны), а внутренний зубчатый венец 12 колеса 7 образует с зубчатым венцом 11 гибкого колеса 6 волновое зацепление (т. е. их числа зубьев неравны). На выходном валу 9 закреплено ведомое звено 2 шарнира манипулятора. Для уменьшения возможных перекосов в волновом зубчатом зацеплении гибкое колесо 6 постоянно прижимается к торцовой поверхности неподвижного кольца 13, запрессованного во фланец 14 ведущего звена 1, нажимной шайбой 15. Сама шайба 15 прижимается к правому торцу гибкого колеса б тарельчатыми пружинами 16, действующими на нее через шток 17, имеющий квадратный конец 18. Усилие прижима нажимной шайбы 15 к торцу гибкого колеса 6 и соответственно к кольцу 13 регулируется с помощью гайки 19. Зубья 20 венца 11 гибкого колеса 6 при изготовлении нарезаны на поверхности начального конуса с углом а при вершине и имеют эвольвентный профиль.
Аналогично, зубчатые венцы 10,12 соответственно жестких колес 8 и 7 выполнены эвольвентно-коническими. Выходной вал 9 установлен на опорах 21 качения в стакане 22, который в свою очередь жестко связан с ведущим звеном 1 через компенсационное кольцо 23.
Жесткое колесо 8 кинематически связано с ведущим звеном 1 посредством дополнительно введенных и расположенных
диаметрально друг относительно друга соответственно регулировочных винтов 24 и стопорных винтов 25,
Шарнир манипулятора работает следующим образом.
После сборки шарнира или в период регламентного обслуживания наладчик регулирует величину прижатия нажимной шайбы 15 к торцу гибкого колеса 6 за счет
0 вращения гайки 19. При этом либо увеличивается, либо уменьшается сила сжатия тарельчатых пружин 16, передаваемая через шток 17 на нажимную шайбу 15. Затем под- шлифовкой или селективным подбором под5 бирают толщину компенсационного кольца 23, исходя из условия устранения бокового зазора в волновом зубчатом зацеплении зубчатого венца 11 колеса 6 и внутреннего зубчатого венца 12 колеса 7, Так как указан0 ные зубчатые венцы 10-12 выполнены эвольвентно-коническими, то, следовательно, ширина каждого зуба этих колес 6-8 постоянна только в каждом конкретном поперечном сечении зубчатого колеса и из5 меняется в зависимости от ширины венца. Указанное изменение характеризуется углом у (фиг. 2).
Таким образом, за счет изменения толщины кольца 23 осуществляют осевое пере0 мещение жесткого колеса 7 вдоль гибкого колеса 6 и выбирают боковые зазоры в их зубчатом зацеплении. Далее вращением двух расположенных диаметрально регулировочных винтов 24 перемещают жесткое
5 колесо 8 вдоль гибкого колеса 6, а в зубчатом зацеплении этих когес 6 и 8 также выбирают боковые зазоры, причем после регулировки положения жесткого колеса 8 , оно стопорится в ведущем звене 1 стопор0 ными винтами 25.
При вращении выходного вала мотор- редуктора 3 вместе с ним вращается волно- образоеатель 5 волновой зубчатой передачи 4, Бегущая волна деформации гибкого коле5. са 6 преобразуется в редуцированное вращательное движение колеса 7, а с ним и ведомого звена 2, жестко связанного с выходным валом 9.
Формула изобретения
0 Шарнир манипулятора, содержащий ведущее и ведомое звенья, а также волновую зубчатую передачу, волнообразователь которой жестко связан с двигателем, установ- ленным .на ведущем звене соосно
5 продольной оси шарнира, при этом гибкое колесо волновой передачи установлено между двумя жесткими зубчатыми колесами и образует зацепление с ними, причем одно из жестких зубчатых колес установлено подвижно в ведущем звене и жестко связано с
ведомым звеном, а продольные оси всех колес волновой зубчатой передачи совпадают с продольной осью шарнира, отличающийся тем, что, с целью повышения точности позиционирования ведомого звена относительно ведущего за счет устранения боковых зазоров в волновом зубчатом зацеплении, он снабжен подпружиненной в осевом направлении нажимной шайбой, установленной внутри подвижного жесткого зубчатого колеса, соосно ему, и имеющей
0
возможность взаимодействия с торцом гибкого колеса, при этом зубчатые венцы всех колес волновой зубчатой передачи выполнены эвольвентно-коническими, причем первое жесткое зубчатое колесо установлено в ведущем звене с возможностью осевого перемещения и кинематически связано с ведущим звеном посредством дополнительно введенных и расположенных диаметрально друг относительно друга соответственно регулировочных и стопорных винтов,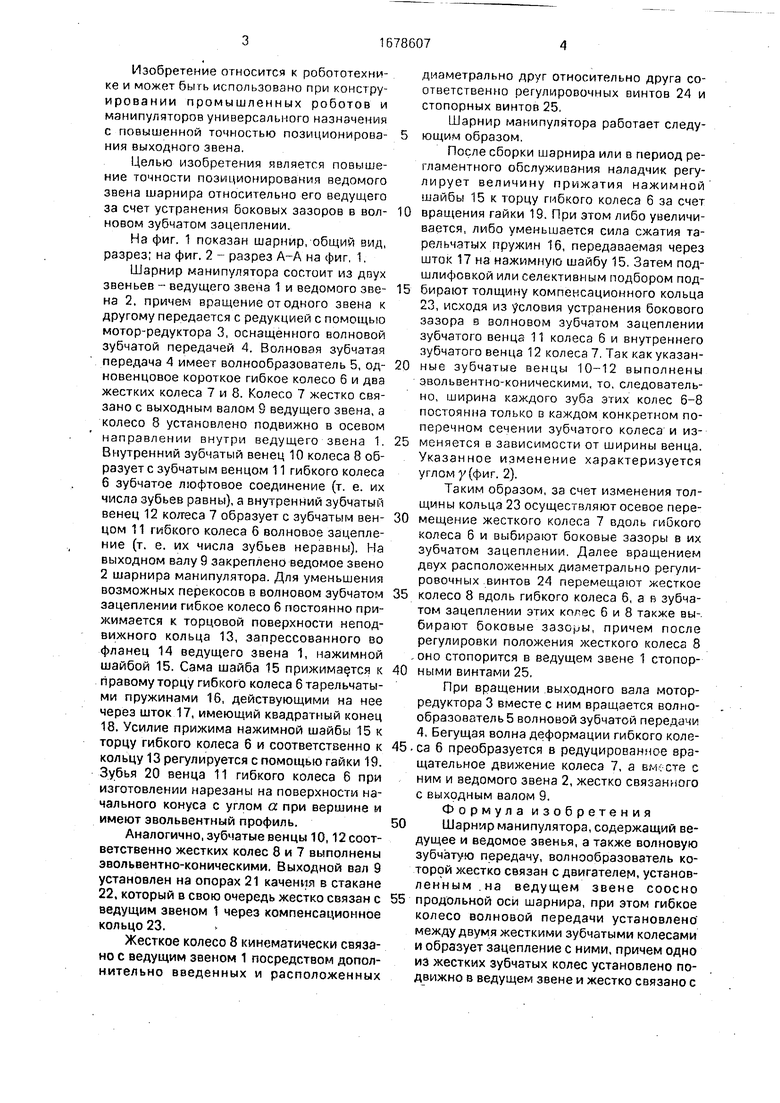
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1988 |
|
SU1535717A1 |
| Шарнир манипулятора | 1986 |
|
SU1351781A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Приводной сферический шарнир | 1989 |
|
SU1646863A1 |
| Шарнир манипулятора | 1987 |
|
SU1516350A1 |
| ВОЛНОВАЯ ПЕРЕДАЧА ДИСКРЕТНОГО ДВИЖЕНИЯ | 2015 |
|
RU2588560C1 |
| Шарнир манипулятора | 1979 |
|
SU804429A1 |
| Электромеханический модульный сустав манипулятора | 1986 |
|
SU1371906A1 |
| РЕДУКТОР С ЦИКЛОИДАЛЬНЫМ ЗАЦЕПЛЕНИЕМ | 1995 |
|
RU2123627C1 |
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1135643A1 |
Изобретение относится к робототехнике и может быть использовано при констру- ирования промышленных роботов и манипуляторов универсального назначения с повышенной точностью позиционирования выходного звена. Цель изобретения - повышение точности позиционирования ведомого звена шарнира относительно его веЈ 75 14 „ 22 23 2/ 13 Щ 18 10117 щт|Ш ; V /////sS/7/////////// дущего за счет устранения боковых зазоров в волновом зубчатом зацеплении. Для уменьшения возможных перекосов в волновом зубчатом зацеплении гибкое колесо 6 постоянно прижимается к торцовой поверхности неподвижного кольца 13, запрессованного во фланец 14 ведущего звена 1, нажимной шайбой 15. Шайба 15 взаимодействует с торцом гибкого колеса 6 тарельчатыми пружинами 16 через шток 17. Зубья венца 11 гибкого колеса 6 имеют эвольвен- тный профиль. Зубчатые венцы 10, 12 соответственно жестких колес 8 и 7 выполнены эвольвентно-коническими, Жесткое колесо 8 кинематически связано с ведущим звеном 1 посредством расположенных диаметрально один относительно другого соответственно регулировочных 24 и стопорных 25 винтов. 2 ил. д О 4 00 ON О ч| Фиг
10
-го
-20 .20
Фаз. 2
| Андре П | |||
| и др | |||
| Конструирование роботов | |||
| - М.: Мир, 1986, с | |||
| Синхронизирующее устройство для аппарата, служащего для передачи изображений на расстояние | 1920 |
|
SU225A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
