Изобретение относится к медицинской криоультразвуковой хирургической аппаратуре при использовании в глубине трубчатых органов, в других недоступных для прямого визуального контроля операционных полях.
Цель изобретения - повышение точности ориентации рабочей части криоультразвукового инструмента путем измерения модуля и фазы комплексного сопротивления пьезопреобразователя.
На фиг. 1 показана структурная схема устройства; на фиг. 2 - структурная схема блока контроля положения криоультразвукового инструмента (КУЗИ); на фиг. 3 - структурная схема регулятора сопротивления; на фиг. 4 - вариант структурной схемы блока контроля положения КУЗИ с многоканальным вольтметром.
Устройство содержит КУЗИ 1 и подключенный к нему источник 2 хладагента, генератор 3 ультразвукового сигнала,
ON 00
О
о ю
формирователь 4 спектра, через блок 5 контроля положения подключенный к КУЗИ 1, блок б управления, первым выходом подключенный к источнику 2 хладагента, вторым выходом - к второму входу блока 5 контроля положения КУЗИ, а третьим выходом - в ходу формирователя 4 спектра, многоканальный измеритель 7 разности фаз, регулятор 8 сопротивления, через многоканальный измеритель 7 разности фаз подключенный к блоку 9 индикации, набор 10 резисторов, соединенных с первым входом коммутатора 11, многоканальный вольтметр 12, соединенный с входом блока 9 индикации.
Устройство работает следующим образом.
Предварительно- перед практическим использованием устройство (фиг. 1) подвергается калибровке.
Калибровку проводят на модельной среде, близкой по своим акустическим характеристикам к биологической ткани (например, 1,5%-ный раствор желатины в воде). Перед проведением калибровки включают устройство и ориентируют акустическую ось пье- зопреобразователя в составе КУЗИ 1 по нормали к поверхности раствора. Далее погружают рабочую поверхность КУЗИ 1 в модельную среду и производят измерение комплексного сопротивления пьезопреоб- разователя или параметров его составляющих. При этом в акустическом контакте со средой не должны находиться периферийные участки пьезопреобразователя.
При проведении измерений устройство (фиг. 1) работает следующим образом.
По команде блока б управления формирователь 4 спектра преобразует широкополосный сигнал на выходе генератора 3 ультразвукового сигнала таким образом, что из него последовательно во времени выделяются сигналы участка необходимых частот и подаются на пьезопреобразователь КУЗИ 1. Их длительность определяется временем преобразования блока 5 контроля положения КУЗИ в операционном поле и временем переходного процесса в пьезоп- реобразователе и должна быть больше их суммы. Частоты возбуждающих сигналов выбирают такими, что на одной из них максимальна чувствительность выбранного параметра пьезопреобразователя к механической нагрузке по всей рабочей его поверхности, а на другой - только по периферийной его части. Блоком 5 контроля положения КУЗИ в операционном поле синхронно с изменением частоты измеряют и индицируют параметры комплексного сопротивления пьезопреобразователя. Их величину фиксируют в паспорте устройства.
До проведения криоультразвукового воздействия КУЗИ 1 устанавливают в операционном поле и проводят режим Контроль. При этом врач, изменяя (вслепую) его положение относительно нормали к поверхности биологической ткани (покачивая влево-вправо, вперед-назад) и степень де0 формации биоткани (усилением или ослаблением режима), стремится добиться таких значений показаний блока 5 контроля положения КУЗИ в операционном поле, какие зафиксированы в паспорте. Устройство для
5 криоультразвукового хирургического воздействия при этом работает так же, как при калибровке. Положение КУЗИ 1 фиксируют и переходят в рабочий режим. По команде блока б управления из источника 2 хлада0 гента в полость КУЗИ 1 поступает хладагент, а формирователь 4 спектра преобразует сигнал генератора 3 ультразвукового сигнала таким образом, что его мощность увеличивается, а частотный диапазон ее
5 спектральной плотности совпадает с полосой рабочих частот пьезопреобразователя. При этом в биологической ткани формируется ультразвук терапевтической интенсивности (0,4-0,5 Вт/см2) и наращивается зона
0 замораживания.
Блок 5 контроля положения КУЗИ работает следующим образом.
По команде блока б управления регулятор 8 сопротивления устанавливает опреде5 ленное значение своего сопротивления и подключает через него выход формирователя 4 спектра к пьезопреобразователю КУЗИ 1 и параллельно к входу многоканального измерителя 7 разности фаз. После установ0 ления переходного процесса в пьезопреоб- разователе измеряется угол сдвига фаз между током и напряжением в цепи пьезопреобразователя. Измеренная величина, пропорциональная углу комплексного со5 противления пьезопреобразователя КУЗИ 1, индицируется индикатором 9 угла сдвига фаз. После окончания измерения по команде блока б управления регулятор 8 сопротивления изменяет свое сопротивление,
0 формирователь 4 спектра перестраивает частоту ультразвукового сигнала и аналогичным образом производят повторное измерение и индикацию угла сдвига фаз. При этом на индикаторе 9 индицируются
55 уже две величины. Одна из них несет информацию о положении КУЗИ 1 в операционном поле, а вторая - о площади теплоакустического контакта рабочей поверхности инструмента 1 с биологической
тканью. Далее осуществляется возврат к
предыдущей частоте и т.д. При установке инструмента 1 в операционном поле измерения производится непрерывно. Изменяя угол наклона поверхности инструмента 1 относительно нормали к поверхности био- ткани, а также степень ее деформации, врач стремится добиться определенных показаний индикатора 9 угла сдвига фаз, оговоренных в паспорте. После установки инструмент 1 фиксируют и переходят в ра- бочий режим. При этом по команде блока 6 управления регулятор 8 сопротивления подключает выход формирователя 4 спектра к пьезопребразователю непосредственно.
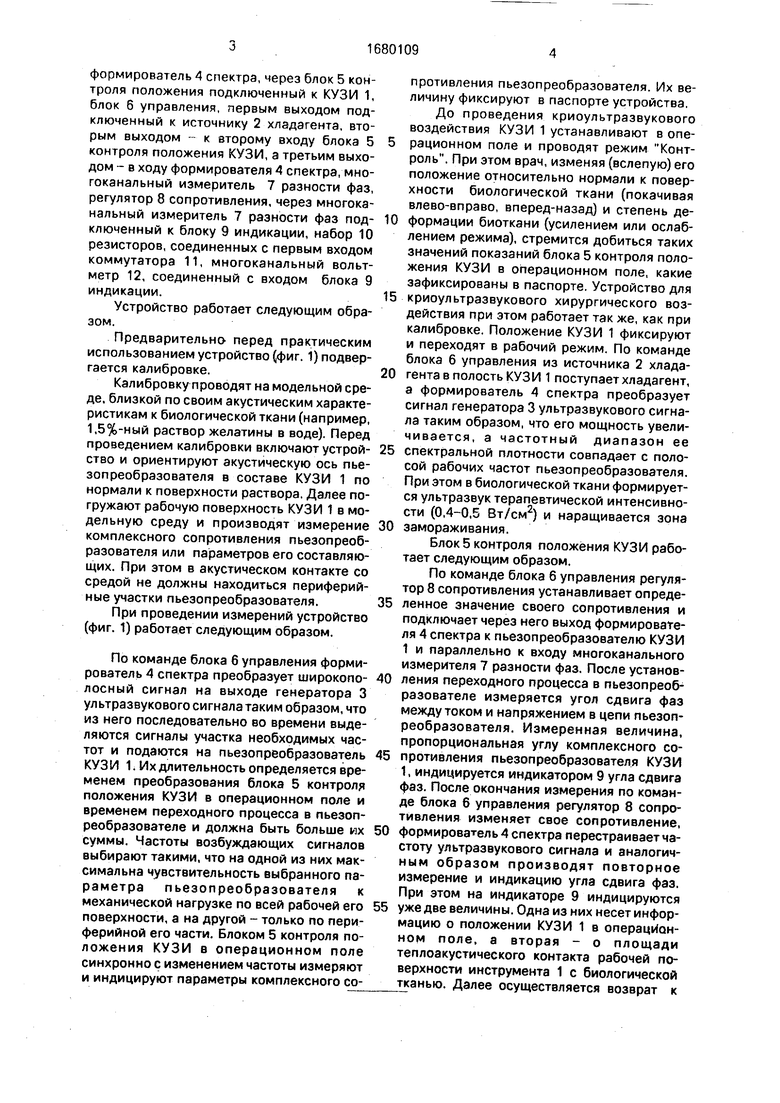
Регулятор 8 сопротивления работает следующим образом.
При установке инструмента 1 в операционном поле коммутаторе 11 (фиг. 3) по команде блока 6 управления подключает выход формирователя 4 спектра к пьезопре- образователю через один из резисторов. 8 рабочем режиме выход формирователя 4 спектра подключается к пьезопреобразова- телю непосредственно. Если для удобства пользования электроды пьезопреобразова- теля секционированы, то коммутатор 11 регулятора 8 сопротивления последовательно во времени (в соответствии с командами блока 6 управления) подключает к выходу формирователя 4 спектра каждую секцию пьезопреобразователя. При этом, ориентируясь по показаниям индикатора, врач может определить направление изменения КУЗИ1.
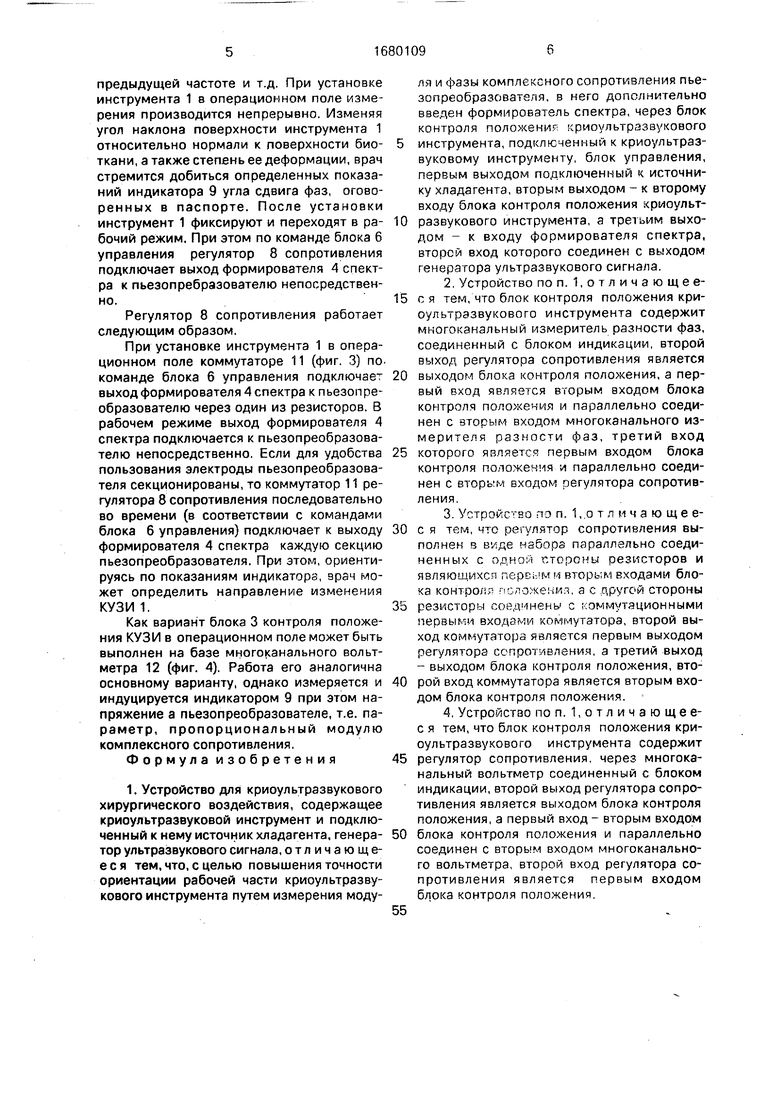
Как вариант блока 3 контроля положения КУЗИ в операционном поле может быть выполнен на базе многоканального вольтметра 12 (фиг. 4). Работа его аналогична основному варианту, однако измеряется и индуцируется индикатором 9 при этом напряжение а пьезопреобразователе, т.е. параметр, пропорциональный модулю комплексного сопротивления.
Формулаизобретения
1. Устройство для криоультразвукового хирургического воздействия, содержащее криоультразвуковой инструмент и подключенный к нему источник хладагента, генера- тор ультразвукового сигнала, отличающееся тем, что, с целью повышения точности ориентации рабочей части криоультразвукового инструмента путем измерения моду
ля и фазы комплексного сопротивления пьезопреобразователя, в него дополнительно введен формирователь спектра, через блок контроля положениг криоультразвукового инструмента, подключенный к криоультраз- вуковому инструменту, блок управления, первым выходом подключенный к источнику хладагента, вторым выходом - к второму входу блока контроля положения криоультразвукового инструмента, а третьим выходом - к входу формирователя спектра, второй вход которого соединен с выходом генератора ультразвукового сигнала.
2.Устройство по п. 1,отличающее- с я тем, что блок контроля положения кри- оультрэзвукового инструмента содержит многоканальный измеритель разности фаз, соединенный с блоком индикации, второй выход регулятора сопротивления является выходом блока контроля положения, а первый вход является вторым входом блока контроля положения и параллельно соединен с вторым входом многоканального измерителя разности фаз, третий вход которого является первым входом блока контроля положения и параллельно соединен с вторь м входом регулятора сопротивления.
3.Устрсжо во нэп. 1, о т л и ч а ю щ е е- с я тем, что регулятор сопротивления выполнен в вуще наборз параллельно соединенных с oЈHo:-i г.торсны резисторов и являюшихсп первг мм вторым входами блока контроля сложеьмл, а с другой стороны резисторы соединены с ;,оммутационными первыми входами коммутатора, второй выход коммутатора является первым выходом регулятора сопротивления, а третий выход - выходом блока контроля положения, второй вход коммутатора является вторым входом блока контроля положения.
4.Устройство поп. 1, о т л и ч а ю щ е е- с я тем, что блок контроля положения криоультразвукового инструмента содержит регулятор сопротивления, через многоканальный вольтметр соединенный с блоком индикации, второй выход регулятора сопротивления является выходом блока контроля положения, а первый вход- вторым входом блока контроля положения и параллельно соединен с вторым входом многоканального вольтметра, второй вход регулятора сопротивления является первым входом блока контроля положения.
Фиг,
| название | год | авторы | номер документа |
|---|---|---|---|
| Криоультразвуковой хирургический инструмент | 1991 |
|
SU1803055A1 |
| Устройство для оценки функционального состояния головного мозга | 1989 |
|
SU1814871A1 |
| Устройство для автоматизированного контроля источников питания | 1986 |
|
SU1366978A1 |
| Хирургический криоультразвуковой инструмент | 1991 |
|
SU1803056A1 |
| Способ внутричерепной диагностики и устройство для его осуществления | 1989 |
|
SU1708307A1 |
| Устройство ультразвукового контроля материалов и изделий | 1990 |
|
SU1748049A2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ | 2009 |
|
RU2424769C2 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ ИЗДЕЛИЙ ИЗ КРУПНОЗЕРНИСТЫХ МАТЕРИАЛОВ И УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ИЗДЕЛИЙ ИЗ КРУПНОЗЕРНИСТЫХ МАТЕРИАЛОВ | 1992 |
|
RU2039979C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГИДРОАКУСТИЧЕСКОГО ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2493543C2 |
| АКУСТИЧЕСКИЙ МИКРОСКОП | 2015 |
|
RU2613339C1 |

Изобретение относится к медицинской криоультразвуковой хирургической аппаратуре с использованием в глубине трубчатых органов, в других стесненных, недоступных для прямого визуального контроля операционных полях. Цель изобретения - повышение точности ориентации рабочей части криоультразвукового инструмента путем измерения модуля или фазы комплексного сопротивления пьезопреобразователя. Устройство содержит криоультразвуковой инструмент и подключенный к нему источник хладагента, генератор ультразвукового сигнала, формирователь спектра, через блок контроля положения криоультразвукового инструмента подключенный к криоультраз- вуковому инструменту, блок управления, первым выходом подключенный к источнику хладагента, вторым выходом - к второму входу блока контроля положения, а третьим выходом - к входу формирователя спектра, многоканальный измеритель разности фаз, регулятор сопротивления через многоканальный измеритель разности фаз, подклю- ченный к блоку индикации. Набор резисторов, соединенных с первым входом коммутатора, многоканальный вольтметр, соединенный с входом блока индикации. Устройство обеспечивает автоматизацию контроляположенияплоскости криоультразвукового аппликатора к поверхности биоткани. 3 з.п. ф-лы, 4 ил.
От Выхода
формирователя if Спектра
II пьезопрео$разователю
Фиг. 2
От Выхода
фор мир о вателя 4 спектра
От выходу
формиро вате/нг 1/ спектра,-
L.
От блока 6
К пьезопреоЬразо с Ътелю КУЗИ1
Н многоканальному изме рителю 7 разности, фаь
Фиг. J
Кпьезопрео5ра.зователю
КУМ 1
1
J
| Криоультразвуковой хирургический инструмент | 1979 |
|
SU1266533A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
