Изобретение относится к роботфтехни- ке-и может быть использовано в различных отраслях промышленности, например в станкостроении.
Цель изобретения - снижение энергозатрат и повышение надежности за счет улучшения режимов работы.
На чертеже изображено устройстао для реализации способа.
Устройство содержит подвижное звено 1 резонансной механической руки, связанное с оснозанием 2 руки упругими элементами 3. На подвижном звене имеется захват 4 для удержания переносимой детали 5 и подвижные части фиксаторов 6 и 7, ответные неподвижные части которых 8 и 9 связаны с основанием эвена.
Подвижное звено механической руки связано с приводным двигателем 10 и снабжено датчиком 11 скорости звена (например, тахогенератор, дающий скорость звена относительно основания) и датчиком 12 положения звена (например, относительно основания звена).
Датчики 11 и 12 связаны с управляющей вычислительной машиной (УВМ) 13, управляющий сигнал от которой через усилитель 14 может подаваться на двигатель 10. Система снабжена также задатчиком 15 опорного напряжения, связанным с двигателем, УВМ к, может быть, сдатчиком 11 и (или) 12. Зедатчикопорного напряжения в приведенном примере выделен как отдельный блок, однако он может быть реализован и с помощью УВМ.
О 00
ю
о о
Устройство работает следующим образом.
Пусть, например, упругие элементы отрегулированы таким образом, что положение равновесия руки без груза находится в середине расстояния между фиксированными крайними положениями, В исходном состоянии подвижное звено находится в крайнем нижнем положении, определенном фиксатором 7 и 9, и упругие элементы обладают запасом потенциальной энергии, в захвате находится переносимая деталь. Траекторию движения подвижного звена делят на 2 участка. Например, первый участок может быть выбран от исходного положения до средней точки между исходным и конечным положением, оставшаяся часть траектории - второй участок.
На первом участке траектории к приводному двигателю подходит опорное напряжение, полярность которого зависит от требуемого направления движения подвижного звена, а величина этого напряжения в зависимости от технической возможности может зависеть от заданных до начала движения уставок, от скорости, координаты в текущий момент времен, но не зависит от скоростей и координат подвижного звена в предыдущих точках траектории. 8 качестве опорного напряжения можно выбрать постоянное по величине напряжение, определяемое расчетом или экспериментально таким образом, что, если подвижное звено движется без груза из исходной точки, то этого напряжения, прикладываемого на всей траектории, достаточно для компенсации диссипации при перемещении звена до конечной точки.
Для начала движения из исходного положения выводят из зацепления фиксаторы 7 и 9 и звено с грузом начинает интенсивный разгон под действием упругих элементов и питаемого опорным напряжением приводного двигателя. В рассматриваемом примере сила тяжести подвижного звена полностью скомпенсирована предварительным натягом упругих элементов; наличие же силы тяжести переносимого груза приводит к тому, что в конце первого участка скорость подвижного звена несколько уменьшится и, если бы движение на остальной части траектории осуществлялось под действием тех же сил, то подвижное звено остановилось бы, не дойдя до фиксируемого крайнего положения.
Для того, чтобы осуществить перемещение звена до крайнего положения, необходимого огранизовать оперативную коррекцию питающего напряжения, которая и производится на втором участке TPJIектории. Для этого в одной, нескольких или во всех точках измеряют скорость подвижного звена с помощью датчика 11 скорости, и записывают эти значения в память УВМ
совместно с значениями соответствующих координат этих точек, полученных, например, от датчика 12 положения подвижного звена.
На втором участке траектории выбирают точки коррекции, соответствующие точкам первого участка, в которых производилось измерение скорости подвижного звена. Например, выбор соответствующих друг другу точек первого и второго участков может быть осуществлен таким образом, чтобы эти точки были симметричны относительно точки, отделяющей пассивный участок от активного.
В рассматриваемом примере в каждой
точке второго участка траектории У В М обеспечивает подачу на двигатель напряжения, определенного как алгебраическая сумма опорного напряжения в этой точке и дополнительного напряжения, причем знак этого
напряжения противоположен знаку рассогласования, т.е. разности между значением скорости в точке первого участка, где находится подвижное звено, и значением скорости звена в соответствующей точке второго
участка. Величину корректирующей добавки выбирают, например, прямо пропорциональной величине рассогласования, причем коэффициент пропорциональности определяется расчетно или экспериментально. Если рассматривается случай не непрерывной, а дискретной коррекции, то от начала первого участка до первой точки коррекции на двигатель можно подавать только опорное напряжение, от первой точки до второй - опорное напряжение с дополнительным, определяемым в первой точке коррекции и т.д.
Предлагаемый способ управления при- водит к симметрии движений подвижного эвена 1 относительно точки, отделяющей первый участок от второго, а так как движение на пассивном участке началось без начальной скорости, то и в крайнюю точку второго участка (конечное положение) подвижное звено придет с нулевой скоростью. Такой результат являлся бы идеальным как с точки зрения минимизации энергозатрат, так и в связи с отсутствием удара по фикса- тору в крайнем положении, однако в реальной системе в этом случае отсутствует запас устойчивости (малое изменение каких-либо параметров, дискретизация корректирующих воздействий и т.д., может привести к сбою в том случае, если остановка подвижного звена произойдет не в крайнем положении, а вблизи него).
Для обеспечения некоторого запаса устойчивости можно несколько сместить границу раздела первого и второго участков в сторону конечного положения или при вычислении рассогласования вместо скорости звена в соответствующей точке первого участка траектории брать сумму этого значения и некоторого постоянного числа. Величина смещения или величина добавки к скорости могут быть определены экспериментально. При этом слишком малые значения этих параметров приведут к малому запасу устойчивости и, следовательно, к вероятным сбоям, а слишком большие значения - к нерациональным энергозатратам.
Обратное движение из конечного положения в исходное, а также движение с грузом другой массы происходит аналогичным образом.
Способ может приводить к возникновению ситуации, i когда скорректированное,- напряжение имеет полярность, противоположную полярности опорного напряжения, т.е. к такой ситуации, когда двигатель работает на части траектории как управляемый тормоз.
Способ может быть эффективно использован как в том случае, когда основание звена не является неподвижным (например, когда роль основания рассмотренного звена выполняет предыдущее подвижное звено робота), так и в том случае, когда на рассмотренном звене закреплено вместо схвата последующее подвижное звено, которое оказывает динамическое влияние на рассмотренное звено.
Формула изобретения
1. Способ управления резонансной механической рукой, имеющей активные и
пассивные режимы перемещения, при котором производят рагфиксацию руки в исходном положении и г.ремйщают руку в другое фиксированное иг,-1сженме с помощью упругих элементов и -лектродвмгателя, о т л и- чающийся тем, (STO, с целью снижения энергозатрат и повышения надежности путем улучшения режимов работы, траекторию движения рули разбивают на два
участка, при этом первом участке к двигателю прикладывает опорное напряжение и измеряют скорость руки в одной или нескольких точках траектории, затем сравнивают значения скоростей в этих точках со
значениями скоростей руки на втором участке в соответствующих точках и формируют значение питающего электродвигатель напряжения в виде алгебраической суммы опорного напряжения и дополнительного
напряжения, величина которого является функцией величины разности между значениями скорости на втором и первом участках, и ее знак противоположен знаку этой разности,
2, Способ по п. 1,отличающийся тем, что траекторию движения руки делят на два равных участка.
3. Способ по п. 2, отличающийся
тем, что соответствующие точки первого и второго участков траектории выбирают симметричными относительно середины траектории.
4. Способ по пп, 1-3, отличающий- с я тем, что величину дополнительного напряжения выбирают прямо пропорциональной величине разности между значениями
скоростей в соответствующих точках первого и второго участков.
/X/
/////
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1366388A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| СПОСОБ ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2441830C1 |
| Устройство для переноса и разделения деталей | 1985 |
|
SU1247260A1 |
| УСТРОЙСТВО ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2448029C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА В КОЛЛИНЕАРНЫЕ ТОЧКИ ЛИБРАЦИИ СИСТЕМЫ СОЛНЦЕ - ЗЕМЛЯ | 1989 |
|
SU1840856A1 |
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| ТРАНСПОРТНАЯ СИСТЕМА МАЯТНИКОВОГО ТИПА | 1993 |
|
RU2077435C1 |
| Привод звена резонансной механической руки | 1982 |
|
SU1219341A1 |
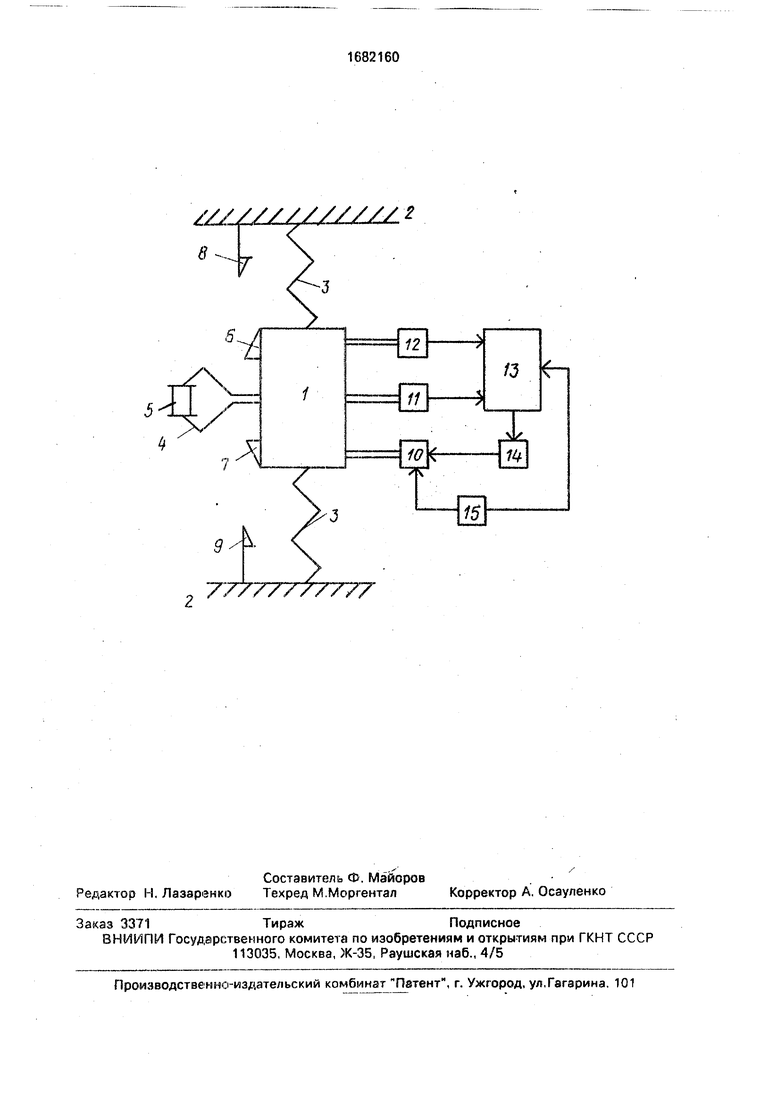
Изобретение относится к робототехнике и может быть использовано в различных отраслях промышленности, например в станкостроении. Цель изобретения - снижение энергозатрат и повышение надежности за счет улучшения режимов работы. При перемещении резонансной механической руки со схватом 4 под действием упругих элементов 3 и электродвигателя 10 на одном участке траектории к двигателю прикладывают опорное напряжение и в одной или нескольких точках измеряют скорость перемещения руки, а затем сравнивают значение скоростей в этих точках со значениями скоростей руки на втором участке в соответствующих точках и формируют значение питающего электродвигатель напряжения в виде алгебраической суммы опорного напряжения и дополнительного напряжения, величина которого является функцией величины разности между значением скорости на втором и первом участках. Участки могут быть равны между собой и точки, в которых производят измерения, располагаются симметрично относительно траектории. Возможно также непрерывное измерение с орости. 3 з.п.ф-лы, 1 ил,
| Наука и жизнь, 1985, Ns 9, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
