Изобретение относится к машиностроению и может использоваться для автоматизации основных и вспомогательных операций.
Цель изобретения - повышение надежности функционирования.
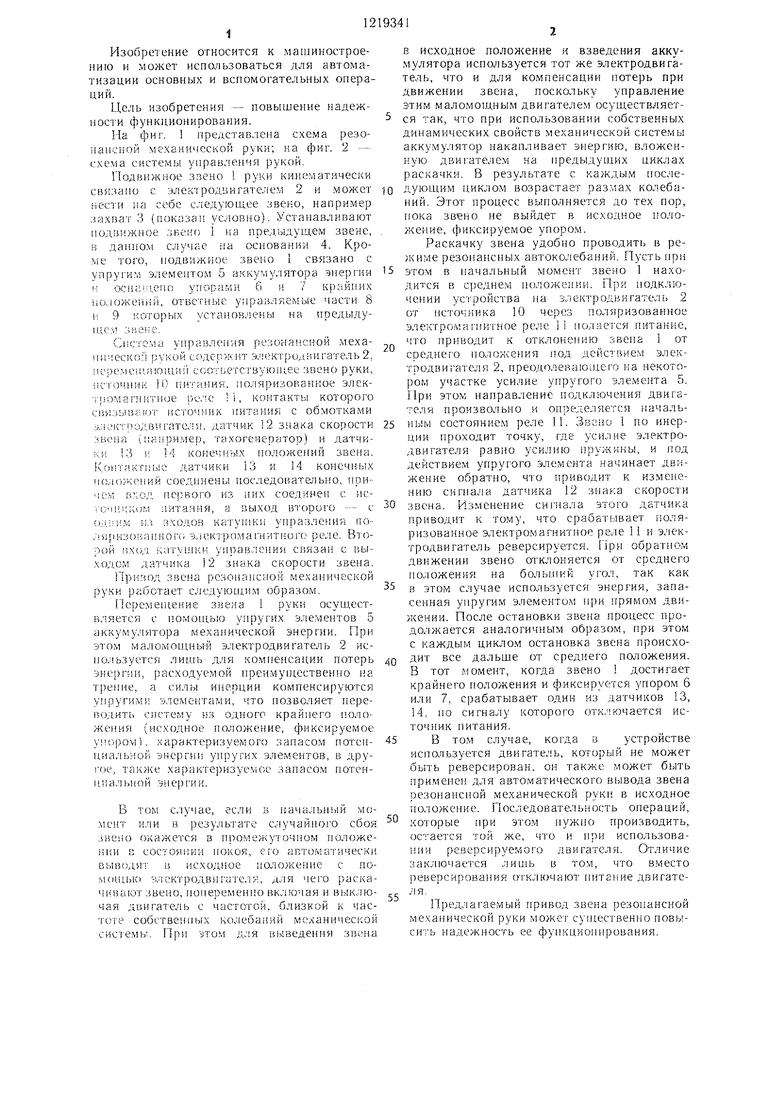
На фиг. 1 представлена схема резонансной механической руки; на фиг. 2 -- ( хема системы управления рукой.
Подвижное звено i руки кинематически связано с электродвигате.пем 2 и может нести на себе следующее звено, например з.ахват 3 (показан УСЛОВНО). Устанавливают подвижное звено 1 н а пред.ыдугцем звене, в данном случае на основании 4. Кроме того, подвижное звено 1 связано с упруги.м элементом 5 аккумулятора энергии ocHat,enf унорагли 6 и 7 крайних цоложепий, ответные уираи.ляеыые части 8 и 9 которых установ ены на предыдущем звене.
Система управления резонансной меха- iiiHiecitoii рукой сс дсржнт э. 1ект;)1)д;5игатель 2. перемеплающий соответствукзн|,ее звено руки, iiCTOMHHi ; 10 питания, поляризованное элек- i liOManiHTi-ioe реле ;, контакты которого С1 :зь1Вйют HCTOMHiiK питания с обмотками ; лектродвигатс и, датчик 12 знака скорости звена i нап ри. лет), тахогенератор) и датчи- к 3 ; 4 конечных ноложений звена. Контактные датчики 13 и 14 конечных 1(;ло кений соед1 .}{ены гюследовательно, нри- первого из них соединен с ис- аитания, а выход второго -- с аходов катунп-;и унразления по- iHorr, электромагнитного ре.. Второй 15ХОД катунн-си унрав; ения связан с выходом датчика i2 знака скорости звена.
Призод звена резона1 сной механической руки работает следуюняим образом.
Перемегцение знена 1 руки осуш.ест- вляется с номоп1Ь о упругих э.71ементов 5 аккумулятора механической энергии. При этом маломошны-й электродвигатель 2 ис- нользуется ли1пь для компенсации потерь энергии, расходуемой преимущественно г трение, а силы И11ерции компенсируются упругими элементами, что позволяет переводить систему из одного крайнего положения (исходное положение, фиксируемое yncipoM). характеризуемого запасом потенциальной энергии унругих эле.ментов, в другое, также характеризуемое запасо.м потен- |,иальной .
В том случае, если з начальный момент или в результате с; учайного сбоя звено окажется в промежуточном положении в состоя1;ии нокоя, ег О автомат н1ески в исходное положение с но- MOHibio электродвигателя, для чего )аска- 4iiBaiOT 3Beiio, г онеременно включая и вык..:1ю- чая ,чвигатель с частотой, близкой к частоте собственных колебагний механической системна. При этом для выведення звена
5
0
5
0
0
5
0
5
В исходное положение и взведения аккумулятора используется тот же электродвигатель, что и для компенсации потерь при движении звена, поскольку управление этим мало.мош,ным двигателем осуществляется так, что при использовании собственных динамических свойств механической системы аккумулятор накапливает энергию, вложенную дви1 ателем на нредыдунлих циклах раскачки. В результате с каждым последующим циклом возрастает размах колебаний. Этот процесс выполняется до тех пор, пока звено не выйдет в исходное положение, фиксируемое упоро.м.
Раскачку звена удобно проводить в режиме резона 1сных автоколебаний. Пусть при этом в начальный момент звено 1 находится в среднем но,; ожен1 и. При нодклю- ченин устройства на электродвигатель 2 от источника 10 через поляризованное электро.«а1-цитное pejie 11 нодается питание, гго приводит к отклонению звена 1 от среднего положения под действием электродвигателя 2, нреодолеваюнтего па некотором участке усилие упругого элемента 5. Г1ри этом направление подключения двигателя произвольно и опре.:;еляется начальным состоянием реле 11. Звено 1 но инерции проходит точку, где усилие электродвигателя равно усилию пружины, и под действие.м упругого элемента начинает движение обратно, что приводит к изме1 е- нию сигнала датчика 12 знака скорости звена. Изменение сигнала этого .аатчика приводит к тому, что срабатывает поляризованное электромагнитное реле 11 и электродвигатель реверсируется. При обратног.1 движении звено отклоняется от среднего положения на больп1ий угол, так как в этом случае используется энергия, запасенная упругим элементом при прямом движении. После остановки звена процесс продолжается аналогичным образом, при этом с каждым циклом остановка звена происходит все дальше от среднего положения. В тот момент, когда звено достигает крайнего положения и фиксируется упоро.м 6 или 7, срабатывает один из датчиков 13, 14, по сигналу которого отключается источник питания.
В том случае, когда в устройстве используется двигатель, который не может быть реверсирован, он также может быть при.менеп для автоматического В1)1вода звена резонансной механической руки в исходное по. южение. Последовательность операций, которые нри это.м нужно производить, остается той же, что и нри использовании реверсируемого двигателя. Отличие заключается лишь в то.м, что вместо реверсирования отк;1К)чают нитание двигателя.
Предлагаемый привод звена резонансной механической руки может сун1ественно повысить надежность ее функционирования.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Способ управления резонансной механической рукой | 1989 |
|
SU1641607A1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1366388A1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| Способ управления резонансной механической рукой | 1987 |
|
SU1553373A1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |


Фиг. 2
| Механическая рука | 1975 |
|
SU568346A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
