Изобретение относится к машиностроению., а именно к управлению роботами и манипуляторами, используемыми для механизации и автоматизации основных и вспомогательных операций 13 промьппленности, например для загрузки и выгрузки деталей со станков в машиностроительном производстве.
Цель изобретения - повышение экономичности за счет снижения -энергозатрат на перемещение руки.
На .чертеже изображено устройство, реализующее способ.
Устройство состоит из подвижного звена - руки 1 с закрепленными на ней схватом 2 и подвижными частями фиксаторов 3 и 4 крайних положений, ответные неподвижные части которых - защелки 5 и 6 связаны с основанием 7, фиксаторы снабжены концевыми выключателями (не показаны), электрически соединенными с усилителем. На руке 1 закреплены также упругие элементы 8, взаимодействующие с основанием 7, Приводной электродвигатель 9 кинематически связан с рукой 1, например черв редуктор 10. Система снабжена датчиком 11 скорости (например, тахо генератором руки), электрически связанным через усилитель 12с электродвигателем 9. Вместо датчика скорости руки можно использовать датчик скорости двигателя, так как рука и двигатель кинематически свя.заны между собой.
Устройство, реализующее способ, работает следующим образом.
Б начальный момент рука 1 находится в крайнем положении, определяемом находящимися В зацеплении фиксаторами 3 и 5, а упругие элементы обладают определенным запасом потенциальной энергии. Для начала процесса выводят из зацепления фиксаторы 3 и 5, связанные с концевым выключателем (не показан), который через усилител 12 подает питающее напряжение на якорную обмотку электродвигателя, и рука 1 под действием упругих элементов 8 начинает интенсивный разгон а после прохождения среднего положения - интенсивное торможение, и при этом сигнал с датчика скорости 11 через усилитель 12 подается на электродвигатель 9, который способствует движению звена в требуемую сторону. БНИИПИ Заказ 5079/13
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Для обеспечения постоянного момента на валу электродвигателя на всем протяжении перемещения к нему подво- дят напряжение, полярность которого соответствует требуемому направлению движения руки, а величина этого напряжения выбирается по формуле
10
и и + и ,
где и, - постоянная составляющая напряжения;
и.
- зависящая от скорости руки переменная составляющая.
Величина переменной составляклцей питающего напряжения зависит от скорости руки (а следовательно, и от скорости кинематически связанного с рукой вала двигателя) и выбирается
по формуле
, Ui КХ, где X - скорость руки;
К - коэффициент, величина которого определяется расчетным путем
или экспериментально таким образом, чтобы и при какой-либо скорости руки равнялось ЭДС индукции в якоре двигателя при соответствующей скорости двигателя.
Так как и ЭДС индукции и U пропорциональны скорости руки и совпадают при некоторой -скорости, то они будут совпадать и при любой скорости руки, т.е. в процессе движения руки
переменная составляющая напряжения 15 будет полностью компенсировать ЭДС, индуцируемую в якоре, поэтому ток в якоре будет определяться только напряжением Ц и оставаться постоянным при любой скорости движения руки.
Формула изобретения
Способ управления резонансной механической рукой, при котором производят расфиксацию руки в исходном положении, перемещают руку из одного фиксированного положения в другое с
помощью упругих элементов и приводного электродвигателя, отличающийся тем, чтЬ, с целью повышения экономичности за счет снижения энергозатрат на перемещение руки,момент, создаваемый приводным электродвигателем, поддерживают постоянным на всем протяжении перемещения руки. аж 951 Подписное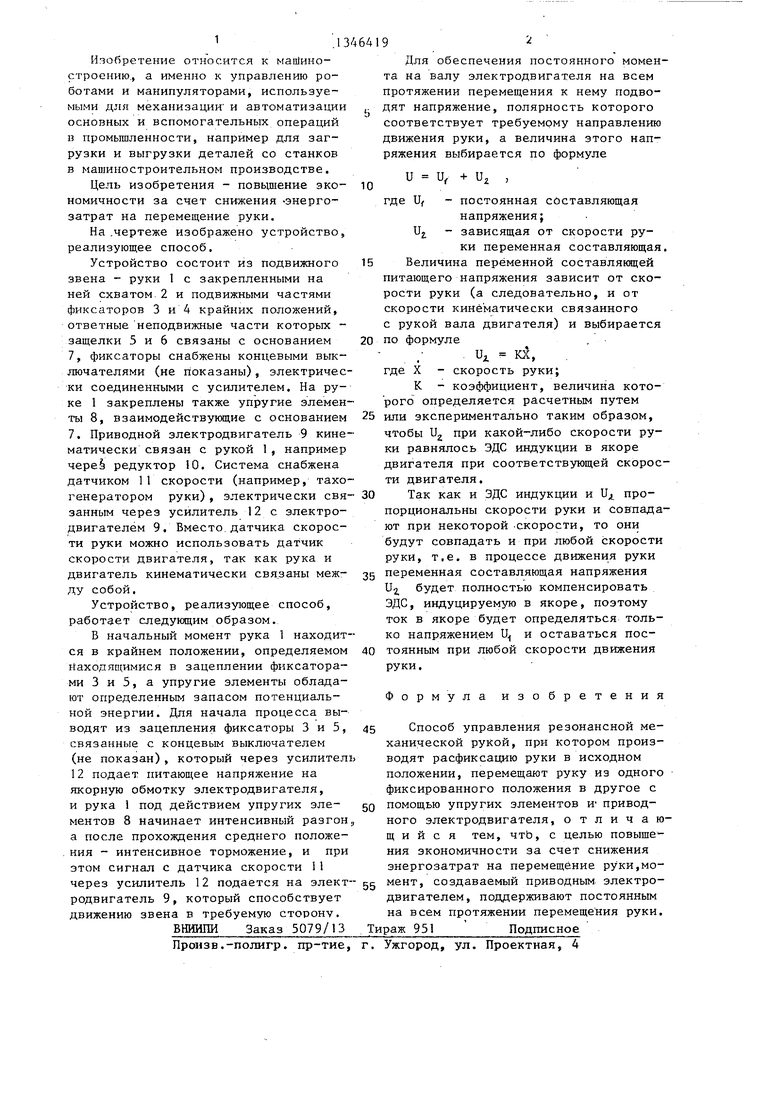
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления приводом резонансного манипулятора | 1988 |
|
SU1593946A1 |
| Способ управления резонансной механической рукой | 1989 |
|
SU1641607A1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ | 1972 |
|
SU360122A1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Устройство для блокировки люка центрифуги | 1977 |
|
SU738678A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1992 |
|
RU2046618C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258600C1 |
Изобретение относится к машиностроению, а именно к управлению роботами и манипуляторами, используемыми для механизации и автоматизации основных и вспомогательных операций в промьшшенности, например, для загрузки и выгрузки деталей со станков в машиностроительном производстве. Целью изобретения является повышение экономичности за счет сниженияэнергозатрат на перемещение руки. В начальный момент резонансная механическая рука находится в исходном положении, характеризуемом определенным запасом потенциальной энергии упругих элементов 8, и удерживается защелкой 5 или 6. Для начала движения производят расфиксацию руки и перемещают ее в новое фиксированное положение с помощью упругих элементов 8 и приводного электродвигателя 9, подводя к нему питающие напряжение, равное сумме постоянной составляющей и добавки. При этом для обеспечения постоянства момента на валу электродвигателя коэффициент пропорциональности между скоростью руки и величиной добавочного напряжения принимают таким, чтобы величина добавочного напряжения при какой-либо скорости руки равнялась ЭДС индукции в якоре электродвигателя при той же скорости руки.1 ил. (Л 00 4:;ii 05 со гг
| Машиноведение, 1983, № 6, с.18. |
