Изобретение относится к машиностроению и может быть использовано для механизации и автоматизации основных и вспомогательных операций в промышленности, например, для загрузки и выгрузки деталей со станков в машиностроительном производстве.
Цель изобретения снижение энергозатрат на перенос и разделение деталей за счет обеспечения фиксации руки в точках, положение которых зависит от массы переносимых деталей.
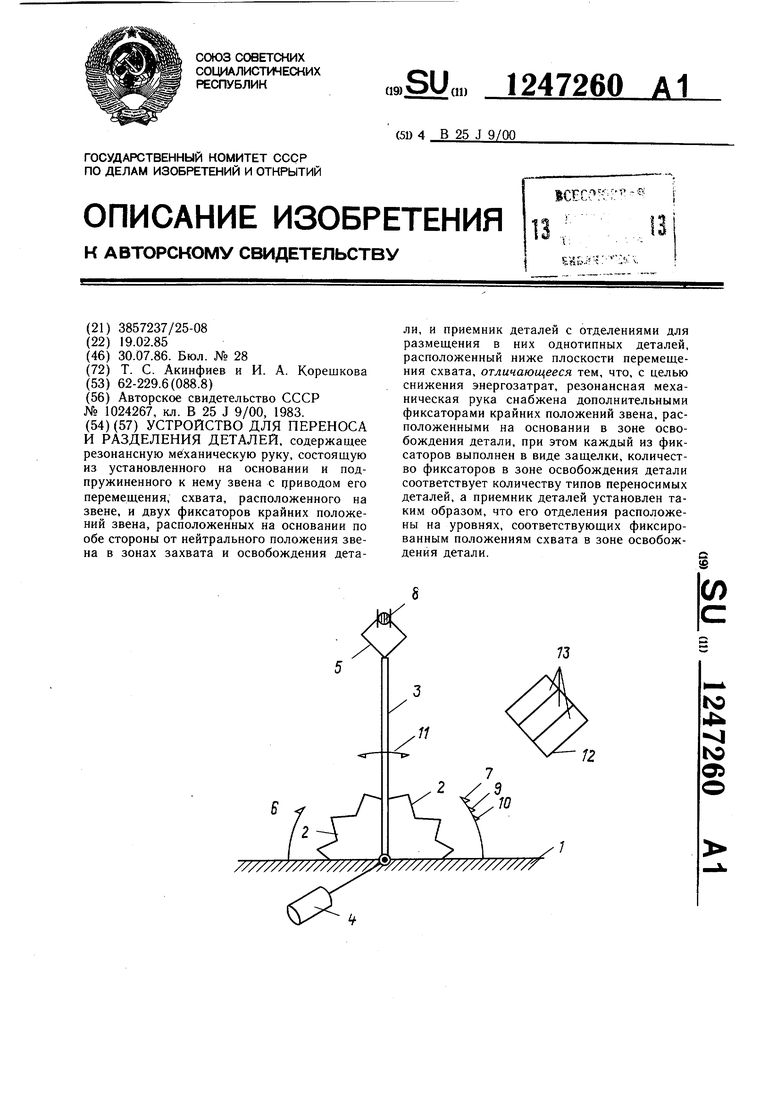
На чертеже изображено устройство, общий вид.
Устройство включает резонансную механическую руку, состоящую из установленного на основании 1 и подпружиненного к нему с помощью упругих элементов 2 звена 3 с приводом 4 его перемещения, несущего схват 5. На основании 1 закреплены фиксаторы 6 и 7 крайних положений звена 3, расположенные в зонах захвата и освобождения детали 8, и дополнительные фиксаторы 9 и 10 крайних положений звена 3, расположенные на основании 1 в зоне освобождения детали. Фиксаторы 6,7,9 и 10 выполнены в виде защелок, взаимодействующих с ответной частью 11, установленной на звене 3. Количество фиксаторов, расположенных в зоне освобождения детали, соответствует количеству типов переносимых деталей. Кроме того, устроство включает приемник 12 деталей с отделениями 13 для размещения в них одинаковых по весу деталей, которые расположены на уровнях, соответствующих фиксированным положениям схвата 5 в зоне освобождения детали.
Устройство работает следующим образом.
В исходном положении фиксатор 6 находится в зацеплении с ответной частью 11.
Упругие элементы 2 обладают запасом потенциальной энергии, привод 4 выключен, а в схвате 5 находится деталь массой М. Для начала работы снимают фиксатор 6 и включают привод 4. Потенциальная энергия упругих элементов переходит в кинетическую энергию звена 3, что обеспечивает его интенсивный разгон..После того, как звено 3 пройдет через среднее положение, его кинетическая энергия переходит в потенциальную
энергию упругих элементов, что обеспечивает интенсивное торможение звена, причем звено автоматически запирается, например, фиксатором 9. Далее схват 5 разжимается и груз попадает в соответствующее отделение 13 приемника 12 деталей. После этого фиксатор 9 снимается, а звено под действием упругих элементов и привода возвращается в исходное положение. Если на следующем цикле в схват подана деталь массой Ml, причем MI М, то инертность звена увеличивается и соответственно уменьшается скорость движения звена с грузом, а время перемещения увеличивается.
Поскольку скорость звена уменьшается, то время перемещения возрастает, соответственно возрастает и вкладываемая двигателем энергия (предполагается, что мощность двигателя постоянна), следовательно, избыточная энергия приведет к большой деформации упругого элемента и остановка звена произойдет дальше от среднего положения, когда фиксатор 10 войдет в зацепление с ответной частью. В этом случае груз попадает во второе отделение 13 приемника деталей 12.
Если бы в схват была подана деталь массой MI М, то сработал бы фиксатор 7 и деталь попала бы в следующее отделение 13 приемника деталей 12.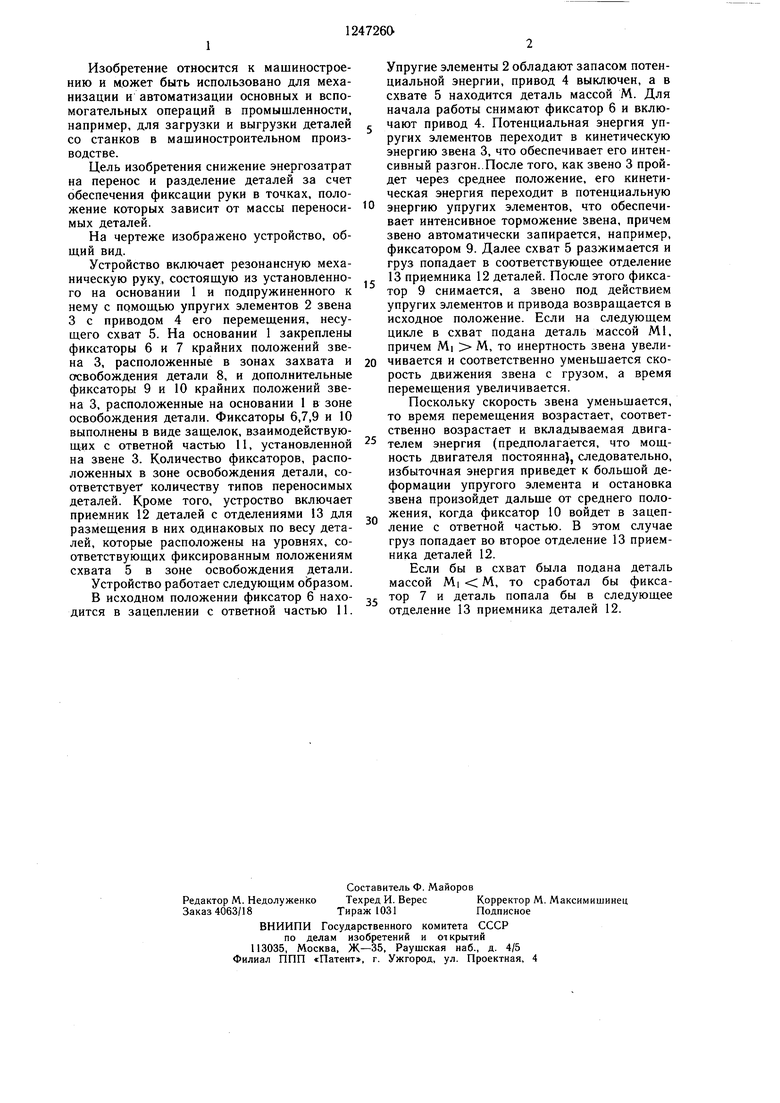
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |
| Способ перемещения резонансного манипулятора и устройство для его осуществления | 1988 |
|
SU1607229A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Схват робота | 1986 |
|
SU1425080A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Способ переноса деталей резонансной механической рукой | 1982 |
|
SU1024267A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
