Изобретение относится к транспортному оборудованию, в частности к автоматизированным системам, предназначенным для перемещения контейнеров или поддонов при погрузочно-разгрузочных работах на летательных аппаратах или других объек- тах
Цель изобретения - повышение надежности работы модуля рольганга путем обеспечения постоянного усилия поджатия к грузу автоматического отслеживания роликом неровностей груза.
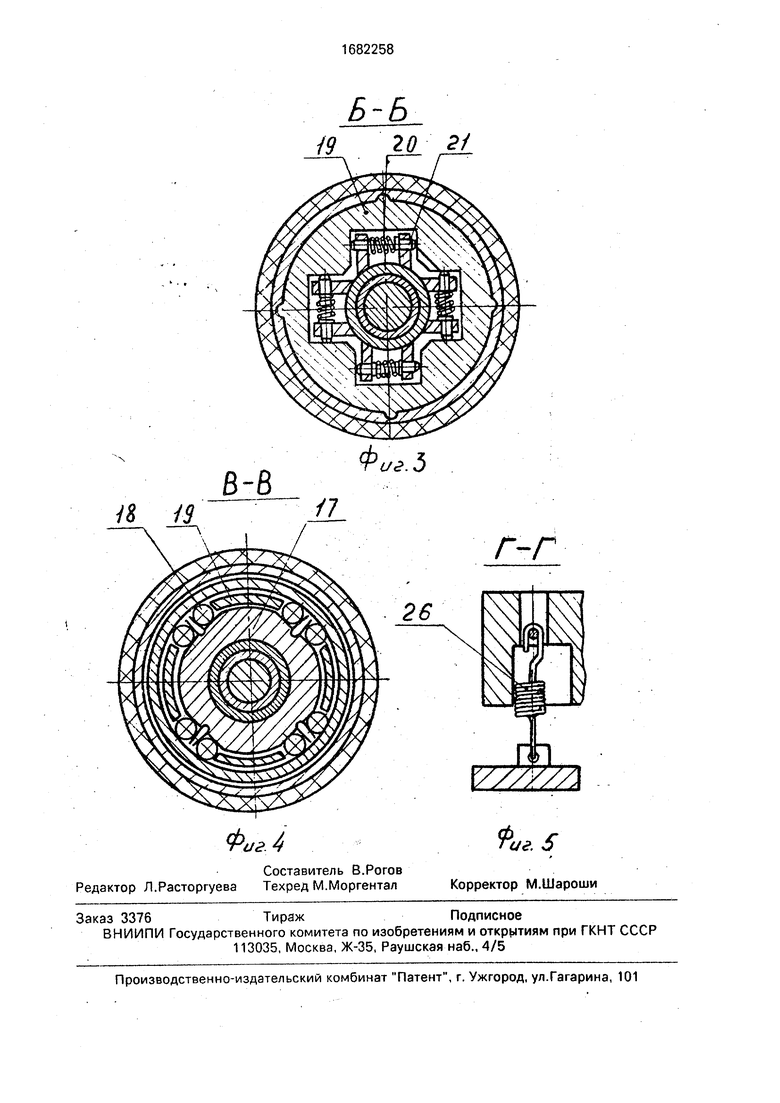
На фиг. 1 изображен модуль рольганга; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 1.
Модуль рольганга содержит ролик 1,оп- рессованный резиной для поёышения силы трения между роликом 1 и дном перемещаемого контейнера при его перемещении. На внутренней поверхности ролика 1 расположено корончатое зубчатое колесо 2, кинематически связанное с сателлитом 3, установленным на оси в виде водила 4, которое размещено на поворотном кронштейне 5, шарнирно закрепленном на основании на подшипниках 6 и 7. Водило 4 выполнено с копиром 8, установленным с возможностью взаимодействия с опорным роликом 9, закрепленным на плите 10. Солнечное зубчатое колесо 11 установлено на приводном валу 12, вращение на который подается от электродвигателя через зубчатое колесо 13 и ведущую шестерню 14, размещенную на валу 12. Ролик 1 установлен на оси, расположенной на основании, с возможностью возвратно-поступательного перемещения в вертикальной плоскости. Привод подъема и поворота ролика 1 состоит из шестерни 14, зубчатого колеса 2 и сателлита 3.
Роликовая муфта-свободного хода двустороннего действия состоит из обоймы 15, которая с помощью выступов через втулку 16 закреплена от прЬворота относительно кронштейна 5, звездочки 17, цилиндрических роликов 18, вилки 19, связанной посредством выступов с роликом 1. Вилка 19 и звездочка 17 подпружинены между собой посредством пружин 20, толкателей 21 и установлены при помощи подшипника скольжения на хвостовике водила 4. Ролик 1 установлен на подшипниках 22 и 23, на водиле 4. Кронштейн 5 смонтирован на подшипниках 24 и 25 и удерживается в опущенном состоянии с помощью пружин 26. Уст ройство содержит ограничитель 27 подъема кронштейна 5.
Модуль работает следующим образом.
При подаче напряжения питания вращение от электродвигателя через встроенный редуктор передается через зубчатые колеса 13 и 14 солнечному колесу 11 планетарной ступени, установленной в ролике 1. Вращение от солнечного колеса 11 передается сателлитам 3, которые, обкатываясь по заторможенному от проворота зубчатому корончатому колесу 2, выполненному за одно целое с роликом 1, передает вращение на водило 4. Водило 4, поворачиваясь, копи0 ром 8 взаимодействует с опорным роликом 9 и, преодолевая усилие пружин 26 и силу тяжести кронштейна 5, обеспечивает поворот кронштейна 5 относительно общей оси подшипников 24 и 25 и подъем ролика 1 до
5 упора его в дно контейнера (поддона). Заторможенное состояние корончатого колеса 2, а следовательно, и ролика 1 на время его подъема до упора в дно контейнера (поддона) обеспечивается заклиненным состояни0 бм роликов муфты свободного хода. После упора ролика 1 в дно контейнера (поддона) водило 4 останавливается на копире 8, вращение от солнечного колеса 11 через сателлиты 3 передается корончатому колесу 2,
5 крутящий момент на нем возрастает вследствие возрастания противодействующей нагрузки, вилка 19, преодолевая усилие пружин 20, поворачивается относительно звездочки 17 и своими выступами взаимо0 действуете цилиндрическими роликами 18, вызывая расклинивание муфты свободного хода
Таким образом, обеспечивается вращение ролика 1 и перемещение контейнера
5 (поддона). Вместе с роликом 1 происходит вращение вилки 19, звездочки 17с цилиндрическими роликами 18 относительно водила 4. После того, как перемещаемый контейнер (поддон) сойдет с ролика, отQ ключается питание электродвигателя, вращение от него не передается на ролик 1, кронштейн 5 вместе с роликом 1 под действием пружин 26 и силы тяжести возвращается в исходное положение. При
5 подъеме и опускании ролика 1 в процессе включения его в работу и выключения, а также при отслеживании роликом в процессе работы неровностей дна контейнера происходит обкатывание зубчатого
0 колеса 14 относительно зубчатого колеса 13, тем самым обеспечивается прижим ролика с оптимальным усилием, необходимым для создания требуемой силы трения для перемещения контейнера
5 (поддона). Для обеспечения одинакового прижатия ролика 1 к дну контейнера (поддона) на оба направления вращения ролика опорный ролик 9 смещен относительно оси ролика 1 в сторону оси поворота кронштейна 5.
Использование ролика модульного конвейера позволяет повысить надежность его работы за счет обеспечения автоматического подъема ролика при включении его в работу и опускания при выключении, отслеживания роликом в процессе работы неровностей дна контейнера (поддона) с обеспечением оптимального усилия прижатия ролика при работе на оба направления вращения, применения встроенной в ролик планетарной передачи с трех или более са- теллитовым водилом, что позволяет повысить нагрузочную способность.передачи.
Ф о р м у л а и з о б р е т е н и я
Модуль рольганга, содержащий установленную на основании с возможностью перемещения в вертикальной плоскости ось, расположенный на оси ролик, привод подъема и поворота ролика с размещенной на приводном валу ведущей шестерней.
расположенным на внутренней поверхности ролика корончатым зубчатым колесом и кинематически связанным с ведущей шестерней и корончатым колесом сателлитом, отличающийся тем, что, с целью повышения надежности работы модуля рольганга путем обеспечения постоянного усилия поджатия к грузу и автоматического отслеживания роликом неровностей груза, он снабжен закрепленным на основании опорным роликом, шарнирно закрепленным на основании поворотным кронштейном и закрепленным на оси копиром, установленным с возможностью взаимодействия с опорным роликом, причем ось ролика расположена на поворотном кронштейне, подпружиненном относительно основания, при этом ось и ролик связаны между собой посредством обгонной муфты, а приводной вал расположен на поворотном кронштейне.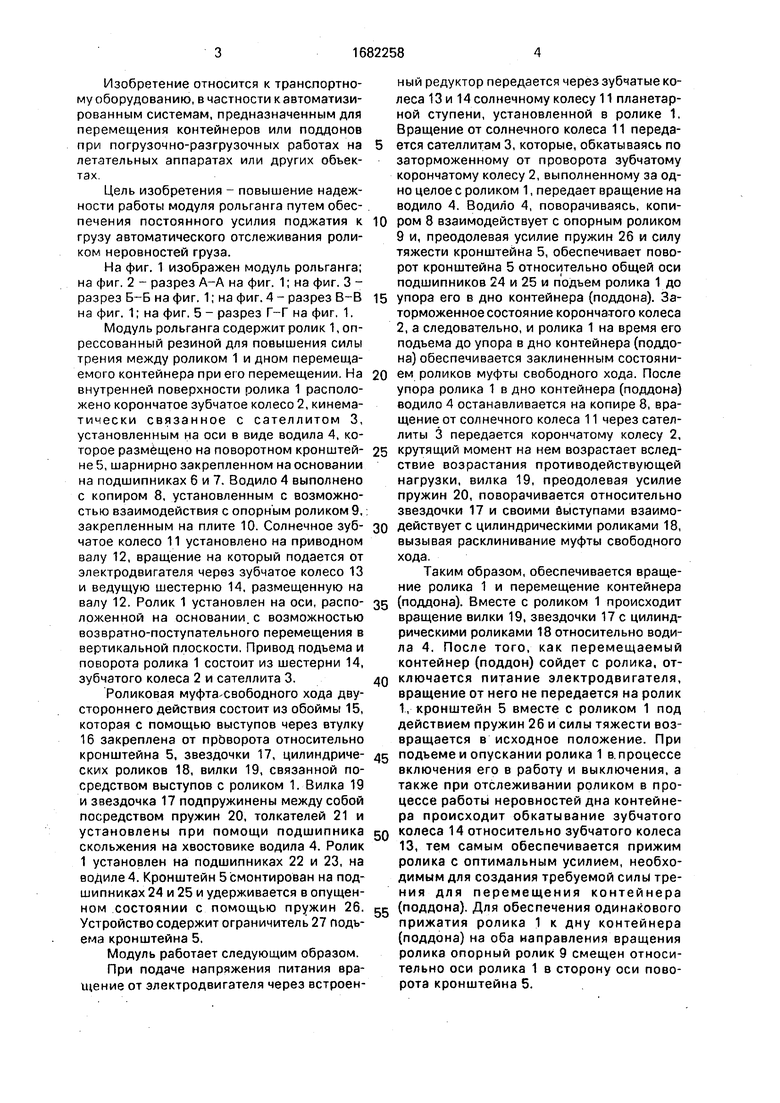

| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват ковочного манипулятора | 1986 |
|
SU1323200A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Устройство для перемещения тележек и вращения установленных на поворотных роликах тележки изделий | 1972 |
|
SU475324A2 |
| ДВУХСТУПЕНЧАТЫЙ ЗУБЧАТЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2000 |
|
RU2190137C2 |
| Веломобиль | 1989 |
|
SU1702869A3 |
| МЕХАНИЗМ ПОВОРОТА СТОЙКИ | 2001 |
|
RU2221736C2 |
| Разгрузочно-загрузочное устройство для подвесного конвейера | 1986 |
|
SU1373647A1 |
| Обмоточное устройство для скрепления грузов полимерной пленкой | 1990 |
|
SU1761602A1 |
| УПОР ДЛЯ ОСТАНОВКИ ПАКЕТА ЛИСТОВ НА РОЛЬГАНГЕ | 1989 |
|
RU2019327C1 |
| Станок для шлифования кулачковых валов | 1975 |
|
SU547328A1 |
Изобретение относится к конвейерам для перемещения контейнеров, Цель изобретения - повышение надежности работы. На основании с возможностью перемещения в вертикальной плоскости установлена ось с роликом (Р) 1. Привод подъема и поворота Р 1 содержит размещенную на приводном валу 12 ведущую шестерню (Ш) 14, 2k 15 12 11 3 2 I2 2 , Ч 1 L-U-4# расположенное на внутренней поверхности Р 1 корончатое колесо 2 и сателлит 3. На основании закреплен опорный Р и шарнир- но закреплен поворотный кронштейн (К) 5. На оси закреплен копир, установленный с возможностью взаимодействия с опорным Р. Причем ось Р 1 расположена на поворотном К 5, подпружиненном относительно основания. Ось и Р 1 связаны между собой посредством обгонной муфты, а приводной вал 12 расположен на поворотном кронштейне К 5. От двигателя вращение через зубчатое колесо 13, Ш 14 и солнечное колесо 11 передается сателлитам 3, а от них водилу 4 и Р 1. Копир водила 4 взаимодействует с опорным Р. При этом Р 1 поднимается до упора в перемещаемое изделие. По окончании транспортировки Р опускается пружиной, а привод отключается. 5 ил. 1 4п s Ё О 00 N3 Ю СЛ С г
е
А-А
Риг. 2
П 13
Ь-Ь
Фиг. 5
Г-Г
У//У//1
| Погрузочно-разгрузочная система | |||
| Проспект фирмы VARO ELECTROOKINETICS DIVISION, США, Калифорния, 1970. |
