(21)А094926/27-03
(22)14.07.86
(46) 15.02.88. Бкш. № 6
(71)Проектно-технологическое производственное объединение Сельстрой- материалы
(72)А.А.Коноплев, Е.И.Наумов, В.М.Корчагин и В.Г.Юркин
(53) 621.867(088.8)
(56) Авторское свидетельство СССР
№ 905137, кл. В 65 G 47/36, 1980.
Авторское свидетельство СССР № 747787, кл. В 65 G 47/36, 1978.
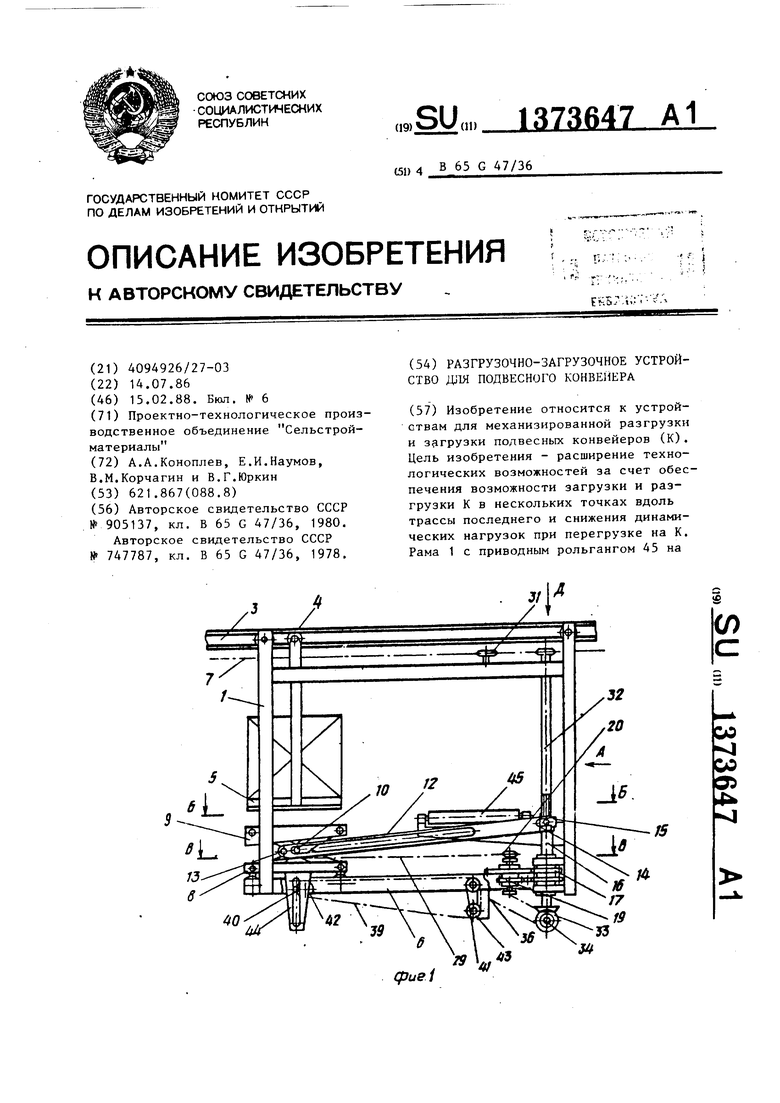
(54) РАЗГРУЗОЧНО-ЗАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВЕСНОГО КОНВЕЙЕРА
(57) Изобретение относится к устройствам для механизированной разгрузки и загрузки подвесных конвейеров (К). Цель изобретения - расширение технологических возможностей за счет обеспечения возможности загрузки и разгрузки К в нескольких точках вдоль трассы последнего и снижения динамических нагрузок при перегрузке на К. Рама 1 с приводным рольгангом 45 на
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Линия отбивки литников и выбивки стержней из отливок | 1980 |
|
SU908519A1 |
| Устройство для транспортирования и перегрузки грузов | 1987 |
|
SU1518246A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для транспортирования и перегрузки грузов | 1987 |
|
SU1518247A1 |
| Подвесной манипулятор для протяжки моделей и сборки крупногабаритных форм | 1988 |
|
SU1646673A1 |
| Устройство для выгрузки сыпучих и кусковых материалов из транспортных средств | 1973 |
|
SU740667A1 |
| Подвеска подвесного конвейера | 1979 |
|
SU814819A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1966 |
|
SU178737A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
(Л
00
00
Cpuei
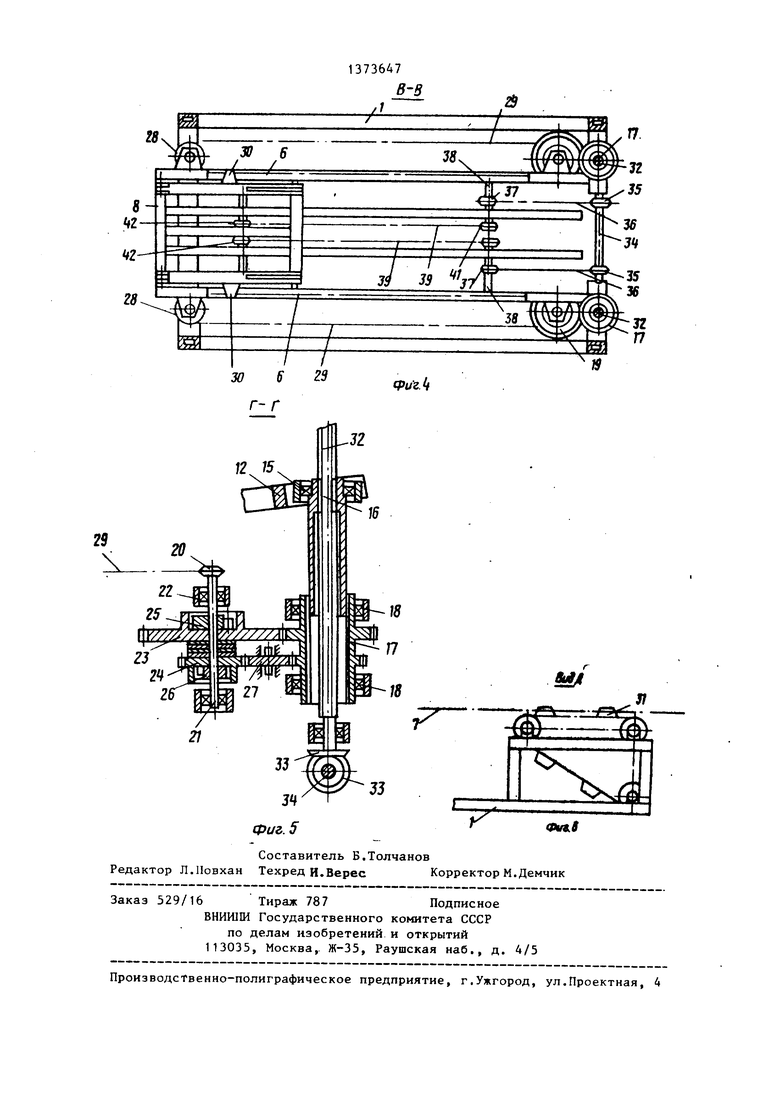
катках перемещается по направляющим (Н) 3 от привода вдоль трассы К. Подвески А последнего перемещают поддоны 5 с грузом. Синхронно с подвеской 4 по Н 6 рамы 1 перемещается от привода в виде цепей 39 тележка 8. Посредством кулисно-рычажного механизма 10 тележка 8 связана с подъемным захватом (ПЗ) 9. Механизм 10 шарнирами связан с механизмом подъема в виде параллельных Н 12 и перемещается вдоль последних. Одним концом Н 12 посредством шарниров связаны с рамой 1. Другим концом Н 12 посредством вилки 14 и подшипникового узла 15 связаны с гайкой 16 механизма изменения угла наклона Н 12. Гайка 16 установлена на постоянно вращающемся
Изобретение относится к устройствам для механизированной разгрузки и загрузки подвесных конвейеров и может применяться во всех отраслях народного хозяйства.
Целью изобретения является расширение технологических возможностей за счет обеспечения возможности загрузки и разгрузки подвесного конвейера в нескольких точках вдоль трассы последнего и снижения динамических нагрузок при перегрузке на подвесной конвейер.
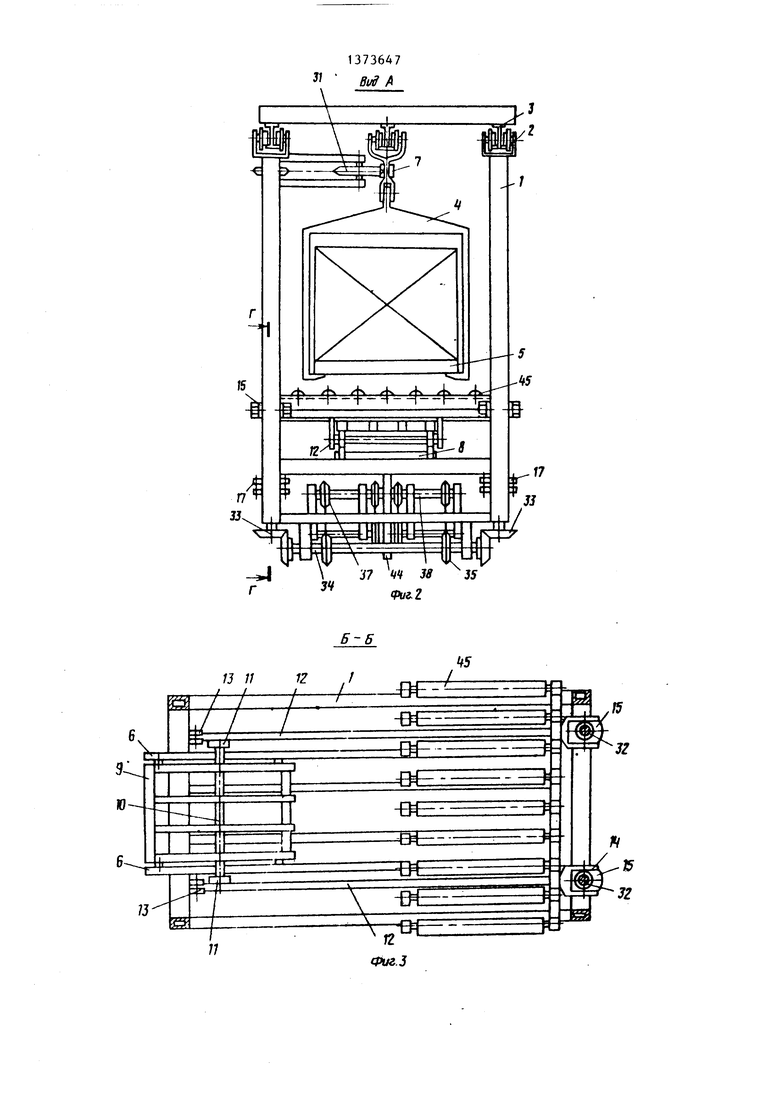
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез В-В на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - вид Д на фиг. 1.
Разгрузочно-загрузочное устройство для подвесных конвейеров содержит раму 1, которая на своих катках 2 может перемещаться по направляющим 3 от привода (не показан) вдоль трассы подвесного конвейера, подвески 4 которого транспортируют поддоны 5 с пакетами груза. Рама 1 имеет в своем составе горизонтальные направляющие 6 по которым синхронно с тяговой цепью 7 подвесного конвейера может перемещаться тележка 8 с подъемным захваот цепи 7 К винте 32. На последнем в подшипниках установлен зубчатый блок 17, связанный с приводом 19 двух скоростного вращения. Цепью 29 привод 19 связан кронштейном с тележкой 8. При одновременном движении тележки 8 и изменении угла наклона Н 12 перемещается ПЗ 9, движущийся синхронно с подвеской 4. При подъеме TF3 9 поднимает поддон 5 и освобождает подвеску 4 от груза. При нахождении ПЗ 9 над рольгангом 45 тележка 8 за счет изменения направления движения цепей 39 останавливается. За счет вращения винта 32 гайка 16, Н 12 и ПЗ 9 опускаются. При этом поддон 5 устанавливается на рольганг 45. 1 3.п. ф-лы, 6 ил.
том 9, кулисно-рычажный механизм 10 подъема, который своими шарнирами 11 связан с механизмом подъема в виде направляющих 12 и может перемещаться вдоль них. Направляющие 12 имеют механизм изменения угла наклона и одним концом связаны с рамой 1 посредством шарнира 13, а другим - посредством вилки 14 и подщипникового узла 15 с гайкой 16, имеющей возможность Йвухскоростного вращения. Гайка 16 имеет возможность осевого перемещения относительно зубчатого блока 17, установленного в подшипниках 18, и получает от него вращение. Зубчатый блок 17 связан с приводом 19 двух- скоростного вращения, йоторый состоит из приводной звездочки 20, жестко насаженной на вал 21, вращающийся в подшипниках 22. Привод 19 содержит также шестерни 23 и 24, каждая из которых связана с валом 21 через механизмы 25 и 26 свободного хода, обеспечивающие свободное вращение шестерен 23 и 24 во встречном на- правлении, причем шестерня 23 находится в зацеплении с зубчатым блоком 17 непосредственно, а шестерня 24 - через паразитную шестерню 27. Приводную 20 и натяжную 28 звездочки охватывает цепь 29, соединенная с те лежкой 8 посредством кронштейна 30. Устройство содержит также гусеничный привод 31, получающий вращение от тя говой цепи 7 и передающий его на винт 32 и дальше через коническую передачу 33 на вал 34, на котором на сажены звездочки 35, связанные посредством цепей 36 со звездочками 37 насаженными на вал 38. Привод переме щения тележки выполнен в виде цепей 39, соединенных между собой пальцем 40 и охватывающих приводные звез дочки 41, насаженные на валы 38, натяжные 42 и отклоняющие 43 звездоч кн. Палец 40 входит в прорезь кулисы 44, жестко связанной с тележкой 8 На раме смонтирован также приводной рольганг 45.
Устройство работает следующим образом.
Включают привод (не показан) и перемещают устройство на катках 2 по направляющим 3 в позицию разгрузки (загрузки). В исходном положении при
-разгрузке устройство налаживают таким образом, что тележка 8 находится в крайнем левом положении, подвеска 4 с поддоном 5 - над подъемным захватом 9, а направляющие 12 - в горизонтсшьном положении. При движении тяговой цепи 7 вращение через гусеничный привод 31 передается на винт 32, коническую передачу 33, вал 34 и далее через звездочки 35, цепи 36 и звездочки 37 - на валы 38, которые через звездочки 41 приводят в синхронное движение цепи 39, охвату- вающие натяжные звездочки 42, откло- няю1цие звездочки 43 и соединенные между собой пальцем 40. При движении цепей 39 палец 40 через кулису 44 перемещает тележку 8 по направляющим 6. Тележка движется синхронно с подвеской 4, при этом она через кронштейны 30 тянет за собой цепи 29, которые вращают звездочку 20 привода 19 двухскоростного вращения. В результате этого вал 21, вращаясь в подшипниках 22, через механизм 25 свободного хода вращает шестерню 23, которая обеспечивает вращение зубчатого блока 17 в подшипниках 18 в направлении вращения винта 32 с частотой, превьш1ающей частоту его вращения. Зубчатый блок 17 вращает гаА- ку 16, которая совершает осевое перемещение относительно зубчатого блока 17 и винта 32, при этом через подшип10
15
20
25
30
35
40
45
50
5
никовый узел 15 и вилку 14 поворачивает направляющую 12 вокруг шарнира 13, закрепленного на раме 1. Ускоренное вращение зубчатого блока 17 передается на паразитную шестерню 27 и шестерню 24, которая вращается относительно вала 21 благодаря механиз- у 26 свободного хода.
При одновременном движении тележки 8 и изменении угла наклона направляющей 12, по которой перемещается шарнир 11 кулисно-рычажного механизма 10 подъема, происходит вертикальное перемещение подъемного захвата 9, которьш движется синхронно с подвеской 4. При дальнейшем подъеме захват 9 поднимает поддон 5 с пакетом и тем самым освобождает подвеску 4 от груза. После того, как захват 9 с поддоном 5 расположился над рольгангом 45, тележка 8 останавливается, так как на этом участке происходит изменение направления движения цепей 39, и палец 40 начинает перемещение вдоль паза кулисы 44. В результате остановки тележки 8 прекращает свое вращение гайка 16, а так как винт 32 продолжает вращаться, то происходит опускание гайки 16, направляющей 12 и захвата 9, вилы которого проходят между роликами рольганга 45, на кото- рьй устанавливается поддон 5. Так как захват 9 поднимает поддон 5 выше опорных плоскостей подвески 4, то за время опускания захвата 9 с поддоном 5 подвеска 4 уходит из зоны установки поддона 5 на рольганг 45, транспортирующий поддон 5 из зоны разгрузки. После того, как захват 9 освободили от поддона 5, происходит изменение направления движения пальца 40, который возвращает тележку 8 в исходное положение. При этом тележка 8 через кронштейн 30 тянет за собой в обратном направлении цепи 29, которые вращают звездочку 20 привода 19 двухскоростного вращения. В результате зтого вал 21 получает вращение в обратную сторону и через механизм 26 свободного хода вращает шестерню 24, которая через паразитную шестерню 27 обеспечивает вращение зубчатого блока 17 в направлении вращения винта 32 с частотой, равной частоте его вращения. При совпадении направления и частоты вращения винта 32 и гайки 16 последняя не имеет осевого перемещения относитепьно винта 32, еледовательно, направляющая 12 не меняет своего положения, а захват 9 не имеет вертикального перемещения. Нормальное вращение зубчатого блока 17 передается на шестерню 23, которая вращается относительно вала 21 благодаря механизму 25 свободного хода. Кинематическая цепь рассчитана таким образом, что к моменту возвращения тележки 8 в исходное положение над ее захватом 9 находится следующая подвеска 4 с поддоном 5, и цикл разгрузки повторяется. В исходном положении при загрузке подвесного конвейера устройство налаживают таким образом, что тележка 8 находится в крайнем правом положении, захват 9 с поддоном 5 - в поднятом над рольгангом 45 положении, а опорные плос- кости подвески 4 расположены ниже поддона 5, и цикл загрузки повторяется в последовательности, обратной разгрузке. Тележка 8 с поднятым захватом 9, на котором находится под- дон 5, движется синхронно с подвеской 4. При перемещении по наклонной направляющей 12 шарнира 11 кулисно- рычажного механизма 10 захват 9 опускается и передает поддон 5 на под- веску 4, после чего тележка В возвращается в крайнее правое положение, останавливается, захват 9 поднимается и снимает с рольганга 45 поддон 5 предварительно поданный в зону загрузки.
Формула изобретения
5 Q
5
0
5
чающееся тем, что, с целью расширения технологических возможностей за счет обеспечения возможности загрузки и разгрузки подвесного конвейера в нескольких точках вдоль трассы последнего и снижения динамических нагрузок при перегрузке на подвесной конвейер, рама установлена подвижно вдоль трассы подвесного конвейера, а подъемный захват связан с тележкой посредством кулисно-рычаж- ного шарнирного механизма, при этом механизм подъема выполнен в виде параллельных направляющих, установленных шарнирно одними концами на раме с возможностью перемещения по ним шарнира кулисно-рычажного шарнирного механизма и имекщих механизм изменения угла их наклона, причем механизм изменения угла наклона параллельных направляющих и привод перемещения тележки кинематически связаны между собой и с тяговой цепью подвесного конвейера.
12
и и
Д/&2
,fS К
к зг
Ф1л9
