Изобретение относится к машиностроению и может быть использовано для шаго- вой подачи изделий в различных автоматических линиях.
Цель изобретения - повышение надежности в работе устройства.
На чертеже представлено предлагаемое устройство.
Устройство для шагового перемещения конвейера содержит размещенный в направляющих 1 тяговый орган 2 с роликами 3, установленное с возможностью возвратно-поступательного перемещения по основанию поступательное звено 4, расположенные на нем с возможностью взаимодействия с тяговым органом 2 управляемые пневмоцилиндром 5 приводные пальцы 6 и 7. Аккумулятор механической энергии выполнен в виде упругих элементов 8 и 9, установленных с возможностью взаимодействия с поступательным звеном 4. С последним взаимодействует привод 10. Для удержания устройства в положении выстоя предназначен механизм фиксации поступательного звена, содержащий основной рычаг 11. один конец которого шэрнирно соединен с поступательным звеном 4, и дополнительный рычаг 12, концы которого шарнирно соединены соответственно с основанием и с другим концом основного рычага 11.
Механизм фиксации поступательного звена также содержит два приводных упора 13 и 14, установленные с возможностью no- очередного взаимодействия соответственно с рычагами 11 и 12 в крайних положениях поступательного звена 4. Приводом упоров 13 и 14 служит, например, электромагнит 15.
Устройство работает следующим образом.
За исходное примем положение выстоя, когда поступательное звено 4 занимает одно из крайних положений, упругий элемент 8 сжат, оси рычагов 11 и 12 примерно совпадают, т.е. система занимает положение, близкое к положению неустойчивого равновесия, и удерживается в нем упором 13. Палец 6 введен во взаимодействие с роликом 3 тягового органа 2.
Для начала движения электромагнит 15 выводит систему рычагов 11 и 12 из положения, близкого к положению неустойчивого равновесия. Упругий элемент 8 разгоняет поступательное звено 4, а вместе с ним и тяговый орган 2 в направляющих 1. Потенциальная энергия упругого элемента 8 переходит в кинетическую энергию подвижных звеньев устройства. Так происходит до тех
пор, пока поступательное звено 4 не достигнет упругого элемента 9. Начинается этап торможения, при котором кинетическая энергия подвижных звеньев переходит в потенциальную энергию сжатого упругого элемента 9. При его максимальном сжатии система рычагов 11 и 12 занимает свое второе положение, близкое к положению неустойчивого равновесия, когда оси рычагов
11 и 12 примерно совпадают и удерживаются в этом положении упором 14.
При перемещении подвижных звеньев потери на трение в системе компенсируются приводом 10.
Привод 10 включается одновременно с электромагнитом 15 и вместе с упругим элементом 8 перемещает поступательное звено 4. Мощность привода 10 определяется из условия компенсации потерь на трение и
преодоления статических нагрузок. Во время выстоя палец 6 выходит из взаимодействия с тяговым органом 2, а палец 7 входит во взаимодействие с роликом 3 противоположной ветви тягового органа 2.
Новый цикл начинается, когда электрс магнит 15 снова выводит систему из выстоя, а сам цикл аналогичен предыдущему.
Таким образом, исполнение механизма фиксации в виде двух шарнирно соединенных рычагов 11 и 12 позволяет повысить точность позиционирования тягового органа 2 путем использования беззазорных сое- динений, а следовательно, повысить надежность работы устройства.
Формула изобретения
Устройство для шагового перемещения конвейера, содержащее размещенный в направляющих тяговый орган, установленное с возможностью возвратно-поступательного перемещения по основанию поступательное звено с расположенным на нем с возможностью взаимодействия с тяговым органом приводным пальцем, установленный с возможностью взаимодействия с поступательным звеном аккумулятор механической энергии, привод и механизм фиксации поступательного звена с основным рычагом, один конец которого шарнирно соединен с поступательным звеном, о тличающееся тем, что, с целью повышения надежности в работе устройства, механизм фиксации поступательного звена выполнен с дополнительным рычагом, концы которого шарнирно соединены соответственно с основанием и с другим концом основного рычага, и двумя приводными упорами, установленными с возможностью поочередного взаимодействия с рычагами в крайних положениях поступательного звена,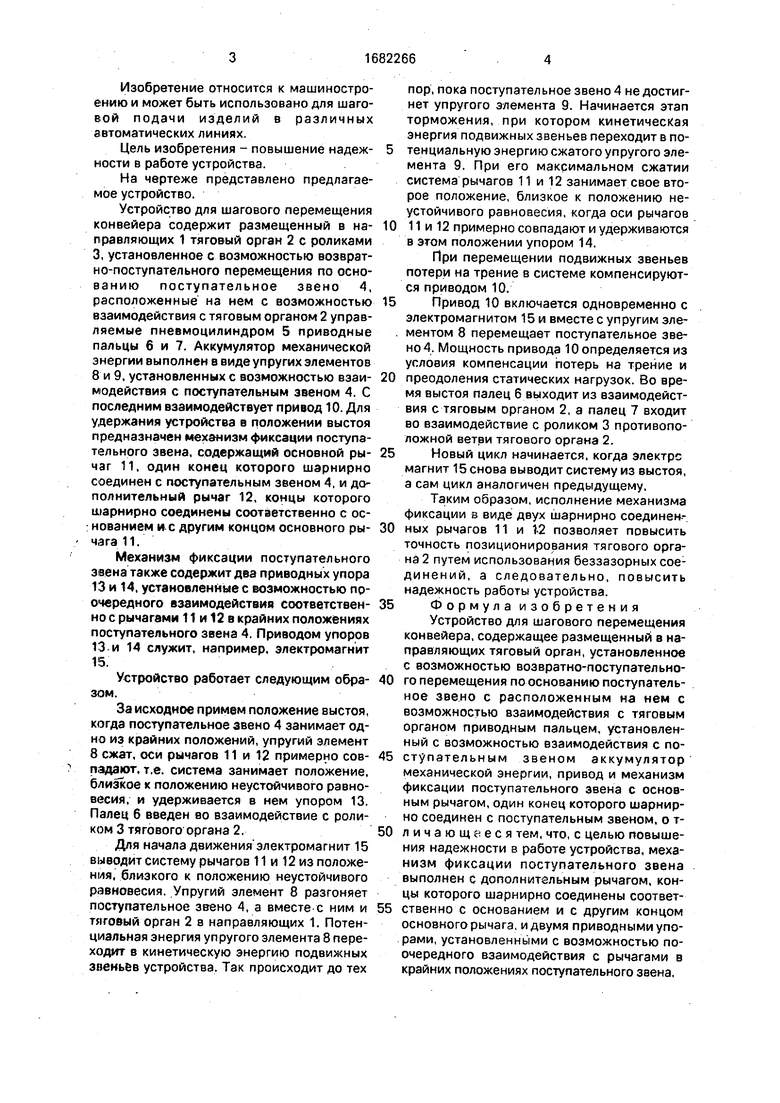
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство прерывистого движения замкнутого рабочего органа конвейера | 1988 |
|
SU1583331A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Прижимное устройство | 1988 |
|
SU1646829A1 |
| Привод прерывистого движения конвейера | 1986 |
|
SU1402746A1 |
| УСТРОЙСТВО ПРЕРЫВИСТОГО ВРАЩЕНИЯ | 1991 |
|
RU2038996C1 |
| Прижимное устройство | 1988 |
|
SU1682154A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Загрузочное устройство | 1985 |
|
SU1346524A1 |
Изобретение относится к устройствам для шагового перемещения конвейера. Цель - повышение надежности в работе. Устройство содержит размещенный в направляющих 1 тяговый орган (Т0)2, установленноесвозможностью возвратно-поступательного перемещения по основанию поступательное звено 4 с расположенными на нем с возможностью поочередного взаимодействия с ТО 2 пальцами 6 и 7. Аккумулятор механической энергии выполнен в виде упругих элементов 8 и 9, установленных с возможностью взаимодействия со звеном 4 и служащих для его перемещения. Механизм фиксации звена 4 содержит основной рычаг (Р)11, один конец которого соединен со звеном 4, дополнительный Р 12, концы которого шарнирно соединены соответственно с основанием и другим концом Р 11, и два приводных от электромагнита 15 упора 13 и 14. Последние смонтированы с возможностью поочередного взаимодействия с Р Т1 и 12 в крайних положениях звена 4. При взаимодействии упора 13 или 14с соответствующим Р 11 или 12 система Р выводится из положения, близкого к положению неустойчивого равновесия, и звено 4 совершает возвратно-поступательное перемещение с остановками, во время которых пальцы 6 и 7 поочередно взаимодействуют с ТО 2. Надежность устройства повышается за счет использования беззазорных соединений в механизме фиксации звена 4. 1 ил. сл с ON СО NJ ND ( 0
| Привод прерывистого движения конвейера | 1986 |
|
SU1402746A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
