Изобретение относится к машиностроению и может быть использовано для шаговой подачи изделий в различных автоматических линиях.
Цель изобретения - повышение надеж- ности путем увеличения несущей способности привода и механизма перемещения и фиксации каретки.
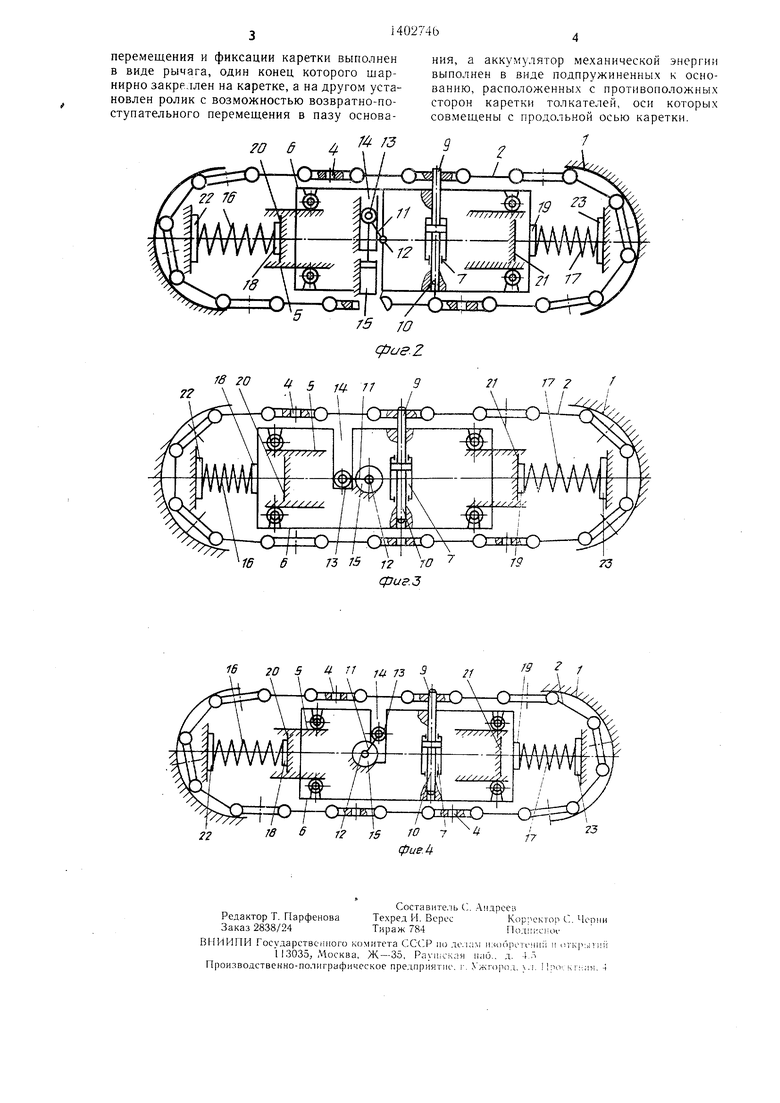
На фиг. 1 изображен предлагаемый привод прерывистого движения конвейера с линейным двигателем в исходном поло- жении; на фиг. 2 - то же, во время перемещения цепи конвейера; на фиг. 3 - привод прерывистого движения кс-нвейера с роторным двигателем в исходном положении; на фиг. 4 - то же, во время перемещения цепи конвейера.
: Привод прерывистого движения конвейера со.держит основание (не показано) с направляющими 1, в которых пере.мещается цепь конвейера 2, имеющая, в звеньях 3 отверстия 4. В основании выполнены на- правляющие 5, в которых перемещается каретка 6 с установленным на ней пневмо- цилиндром 7 двухстороннего действия, на штоке 8 которого установлены приводные пальцы 9 и 10, которые взаимодействуют с отверстиями 4 звеньев 3. Механизм перемещения и фиксации каретки содержит рычаг 11, один конец которог о закреплен на шарнире 12 в каретке 6, а на второй установлен ролик 13, размещенный в пазу 14 основания с возможностью возвратно-посту- нательного перемещения. Привод рычага 11 осуществляется с помощью двигателя 15 (линейного или роторного). При использовании роторного двигателя рычаг с помощью шарнира 12 крепится к основанию, а наз 14 выполняется в каретке 6.
Привод прерывистого движения вклю- чаеч аккумулятор механической энергии, выполненный в виде подпружиненных пружинами 1б и 17 к основанию толкателей 18 и 19. расположенных с противоположных сторон каретки 6 и взаимодействующих с упо- рами 20 и 21 каретки 6. Регулировка жесткости пружин 16 и 17 осуществляется регу- . Гировочными прокладками 22 и 23, установленными между пружинами 16 и 17 и основанием. г-г Привод прерывистого движения кон1;еиера работает следующим образом.
Исходное положение состояния выстоя конвейера - каретка б занимает крайнее левое положение, пружина 16 сжата и посредством толкателя 18 давит на каретку б, палец 9 введен в отверстие 4 зве( 3 цепи конвейера 2, рычаг 11 занимает «.мертвое положение и его ось совпадает с направлением действия силы пружины 1G и перпендикулярна оси паза 14.
Для пере.мендения цепи конвейера 2, например, по часовой стрелке, двигатель 15 перемещает ролик 3 рычага 11 по пазу 14 и выводит рычаг 11 из «мертвого положе5
,-
0 0 5
О 11- S
0
ния. После чего пружина 6 начинает перемещать каретку 6 в направляющих 5 в направлении слева направо, а вместе с ней посредством пальца 9 по часовой стрелке в направляющих перемещается цепь конвейера 2. Рычаг 11 в это время вращается вокруг щарнира 12 против часовой стрелки. 11ри разгоне потенциальная энергия сжатия пружины 16 переходит в кинетическую энергию движения каретки 6, цепи конвейера 2 и других перемещающихся вместе с ними звеньев. Разгон подвижных звеньев конвейера продолжается до тех пор, пока толкатель 18 не достигнет упора 20. Далее происходит движение конвейера по инерции. После прохождения кареткой 6 своего среднего положения двигатель 15 перемещает ролик 13 по пазу 14 в обратном направлении. При достижении кареткой 6 толкателя 19 начинается сжатие пружины 17 и торможение каретки 6 и соответственно цепи конвейера 2. Кинетическая энергия подвижных звеньев при торможении переходит в потенциальную энергию пружины 17. Движение каретки 6 происходит до тех пор, пока упорный рычаг 11 не займет второе «.мертвое положение. При этом двигатель
15выключается. Далее происходит выстой конвейера, во время которого с помощью пневмоцилиндра 7 палец 9 выводится из отверстия 4 звена 3 цепи конвейера 2, а палец 10 вводится в другое отверстие 4.
По окончании выстоя двигатель 15 толкает ролик 13 и, вращая по - часовой стрелке рычаг 11, выводит его из «мертвого положения и при помощи пружины 17 начинается движение каретки 6 в обратном направлении, а вместе с ней посредством пальца 10 по часовой стрелке перемещается цепь конвейера 2.
Время движения каретки зависит от усилия пружин 16 и 17 и массы перемещаемых звеньев. Для регулирования времени перемещения с позиции на позицию предусмотрена регулировка сил предварительного поджатия пружин 16 и 17 с novo щью регулировочных прокладок 22 и 23, что позволяет компенсировать нестабильность механических характеристик пружин
16и 17 и разброс весовых показат ляй деталей конвейера.
Формула изобретения
Приво.д прерывистого движения конвейера, содержащий основание с направляющими, каретку, установленную в направляющих с возможностью поступательного перемещения, аккумулятор механической энергии мех.апиз.ч перемещения и фиксаци.и каретки, отличающийся тем, что- с целью повышения надежности, в основании выполнен паз, привод снабжен приводными пальцами, установленными на каретке к предна.эпаченными л1ля поочередного взаимодействия с противолежащими ветвями конвейера, механизм
перемещения и фиксации каретки выполнен в виде рычага, один конец которого шар- нирно закреллен на каретке, а на другом установлен ролик с возможностью возвратно-поступательного перемещения в пазу основания, а аккумулятор механической энергии выполнен в виде подпружиненных к основанию, расположенных с противоположных сторон каретки толкателей, оси которых совмещены с продольной осью каретки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| Устройство прерывистого движения замкнутого рабочего органа конвейера | 1988 |
|
SU1583331A1 |
| Устройство для шагового перемещения конвейера | 1989 |
|
SU1682266A1 |
| УСТРОЙСТВО ПРЕРЫВИСТОГО ВРАЩЕНИЯ | 1991 |
|
RU2038996C1 |
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Поворотное устройство | 1991 |
|
SU1810683A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Модуль робота | 1990 |
|
SU1722809A1 |
| Прижимное устройство | 1988 |
|
SU1682154A1 |
| Исполнительный механизм устройства для упаковывания | 1987 |
|
SU1421623A1 |
Изобретение относится к машиностроению и может быть использовано для шаговой подачи изделий в различных автоматических линиях. Цель изобретения - повышение надежности путем увеличения его несущей способности. Для перемешения цепи конвейера 2 двигатель 15 перемешает ролик 13 рычага 11 по пазу 14 и выводит рычаг из «мертвого положения, когда его ось совпадает с направлением действия си- . Ъ пружины 16 я перпендикулярна оси паза 14, после чего пружина 16 начинает перемешать каретку о в направляющих о, а вместе с Hcii посредством пальца 9 в на- правляюших 1 перемещается н цепь конвейера 2. Рычаг 11 вращается при этом вокруг шарнира 12 против часовой стрелки. При разгоне потенциальная энергия пружп- ны 16 переходит в кинетическую энергию движения кареткп 6. При достижении кареткой 6 толкателя 19 начинается сжатие пружины 17 и тор.можение каретки 6, а с ней и цепи конвейера 2. Кинетическая энергия подвижных звеньев переходит в потенциальную энергию пружины 17. При достижении упорным рычагом 11 своего второго «мертвого положения двигатель 15 отключается, и движение цепи конвейера 2 прекращается. Начинается выстой конвейера. По окончании выстоя палец 9 гидроцилиндра выводится из отверстия 4 звена 3 цепи конвейера 2, а палец 10 выводится в другое отверстие 4 другого звена 3, и цикл повторяется. За счет использования более простых и надежных аккумуляторов механической энергии, механизма фиксации каретки и привода перемещения каретки увеличивается несуп1ая способность привода прерывистого движения конвейера и тем самым повышается его надежность. 4 ил. о N5 . С фаё.1
О
16
16
22
/ /J
17
73
| Болотин Л | |||
| М | |||
| и др | |||
| Цикловые работы с аккумуляторами механической энергии | |||
| Основы построения привода.- Станки и инструмент, 1984, № 4, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| , | |||
