вяка передают вращение поворотному муфта. 2 ил.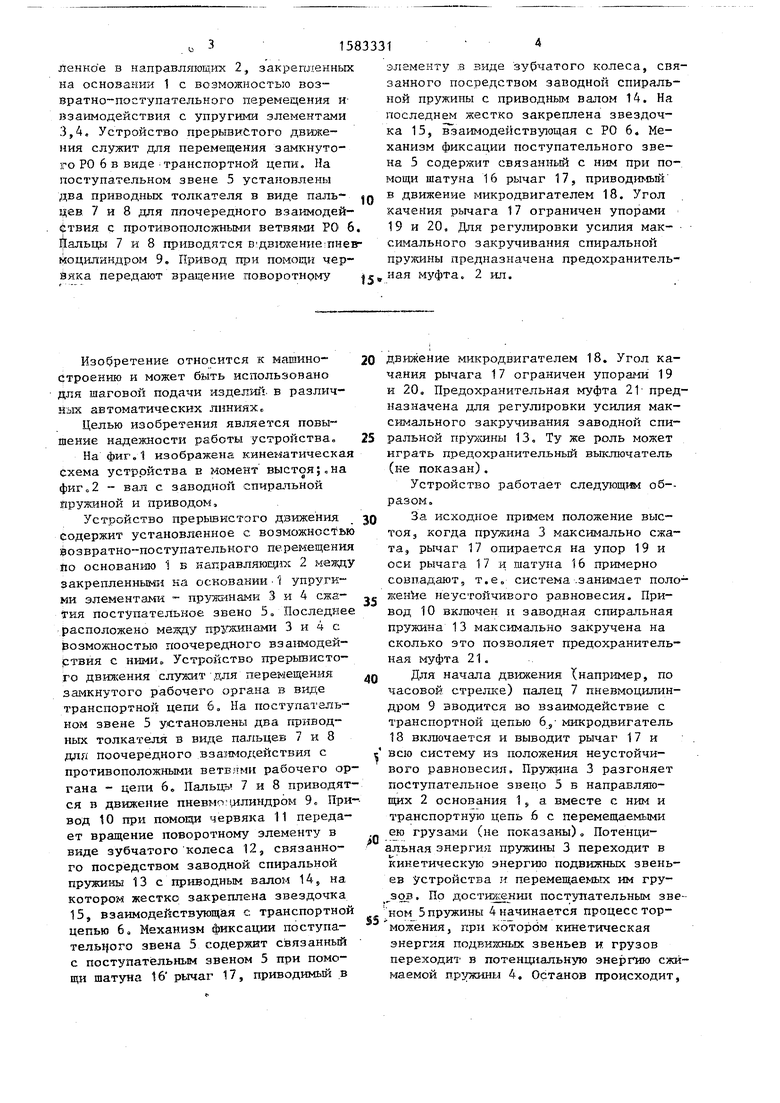
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство прерывистого вращения | 1988 |
|
SU1610154A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1585143A1 |
| Устройство прерывистого вращения | 1989 |
|
SU1703896A1 |
| УСТРОЙСТВО ПРЕРЫВИСТОГО ВРАЩЕНИЯ | 1991 |
|
RU2038996C1 |
| Устройство для резки глиняного бруса | 1980 |
|
SU903121A1 |
| Устройство для шагового перемещения конвейера | 1989 |
|
SU1682266A1 |
| Привод прерывистого вращения | 1988 |
|
SU1663282A1 |
| КОНВЕЙЕР С ПРЕРЫВИСТЫМ ДВИЖЕНИЕМ ТЯГОВОГО ОРГАНА | 1996 |
|
RU2108278C1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1133009A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1984 |
|
SU1166907A1 |
Изобретение относится к машиностроению и может быть использовано для шаговой подачи изделий в различных автоматических линиях. Цель - повышение надежности работы устройства. Устройство прерывистого движения замкнутого рабочего органа (РО) конвейера включает поступательное звено 5, установленное в направляющих 2, закрепленных на основании 1 с возможностью возвратно-поступательного перемещения и взаимодействия с упругими элементами 3, 4. Устройство прерывистого движения служит для перемещения замкнутого РО 6 в виде транспортной цепи. На поступательном звене 5 установлены два приводных толкателя в виде пальцев 7 и 8 для поочередного взаимодействия с противоположными ветвями РО 6. Пальцы 7, 8 приводятся в движение пневмоцилиндром 9. Привод при помощи червяка передает вращение поворотному элементу в виде зубчатого колеса, связанного посредством заводной спиральной пружины с приводным валом 14. На последнем жестко закреплена звездочка 15, взаимодействующая с РО 6. Механизм фиксации поступательного звена 5 содержит связанный с ним при помощи шатуна 16 рычаг 17, приводимый в движение микродвигателем 18. Угол качения рычага 17 ограничен упорами 19, 20. Для регулировки усилия максимального закручивания спиральной пружины предназначена предохранительная муфта. 2 ил.
Изобретение относится к машиностроению и может быть использована для шаговой подачи изделий в различных автоматических линиях.
Целью изобретения является повышение надежности работы устройства.
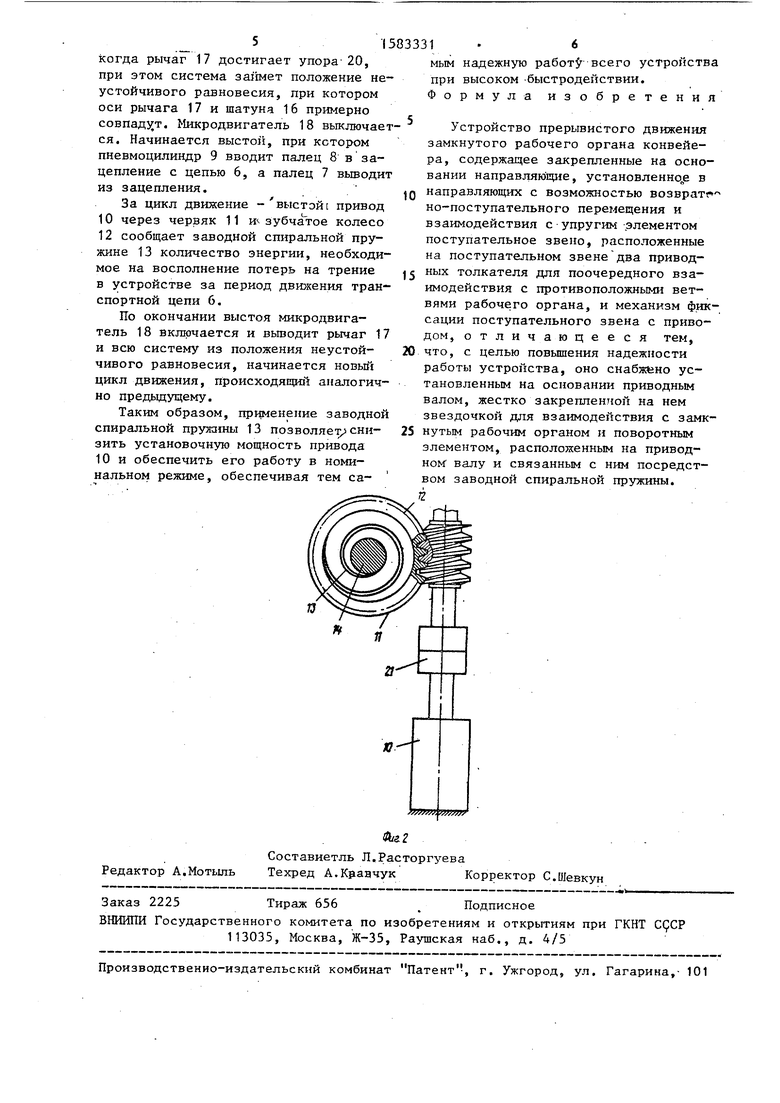
На фиг.1 изображена кинематическая схема устройства в момент выстоя;.на фиг о 2 - вал с заводной спиральной Пружиной и приводом,
Устройство прерывистого движения Содержит установленное с возможностью йозвратно-поступательного пе ремещения по основанию 1 в направляющие 2 между закрепленными на основании 1 упругими элементами - пружинами 3 и 4 сжатия поступательное звено 5. Последнее расположено между пружинами 3 и 4 с Возможностью поочередного взаимодействия с ними Устройство прерывистого движения служит для перемещения замкнутого рабочего органа в виде транспортной цепи 6. На поступательном звене 5 установлены два приводных толкателя в виде пальцев 7 и 8 для поочередного взаимодействия с противоположными ветв ми рабочего органа - цепи 6. Пальцы 7 и 8 приводятся в движение пневм цшиндром 9. Привод 10 при помощи червяка I1 передает вращение поворотному элементу в виде зубчатого колеса 123 связанного посредством заводной спиральной пружины 13 с приводным валом 14, на котором жестко закреплена звездочка 15, взаимодействующая с транспортной цепью 6 о Механизм фиксации поступательного звена 5 содержит связанный с поступательным звеном 5 при помощи шатуна 16° рычаг 17, приводимый в
5
0
0 движение микродвигателем 18. Угол качания рычага 17 ограничен упорами 19 и 20. Предохранительная муфта 21 предназначена для регулировки усилия максимального закручивания заводной спиральной пружины 13. Ту же роль может играть предохранительный выключатель (ке показан).
Устройство работает следующим об-- разом.
За исходное примем положение вые- тояэ когда пружина 3 максимально сжата, рычаг 17 опирается на упор 19 и оси рычага 17 я шатуна 16 примерно совпадают, т.е. система занимает полое жение неустойчивого равновесия. Привод 10 включен и заводная спиральная пружина 13 максимально закручена на сколько это позволяет предохранительная муфта 21.
Для начала движения например, по часовой стрелке) палец 7 пневмоцилин- дром 9 вводится во взаимодействие с транспортной цепью 6, микродвигатель 18 включается и выводит рычаг 17 и S всю систему из положения неустойчивого равновесия. Пружина 3 разгоняет поступательное звено 5 в направляющих 2 основания 1, а вместе с ним и транспортную цепь 6 с перемещаемыми ею грузами (не показаны), Потенциальная энергия пружины 3 переходит в кинетическую энергию подвижных звеньев устройства и перемещаемых им гру- JSOB, По достижении поступательным звеном 5 пружины 4 начинается процесс торможения, при котором кинетическая энергия подвижных звеньев и грузов переходит в потенциальную энергию сжимаемой пружины 4. Останов происходит,
0
o:i
5когда рычаг 17 достигает упора 20, при этом система займет положение неустойчивого равновесия, при котором оси рычага 17 и шатуна 16 примерно совпадет. Микродвигатель 18 выключается. Начинается выстой, при котором пневмоцилиндр 9 вводит палец 8 в зацепление с цепью 6, а палец 7 выводит из зацепления.
За цикл движение - выстой привод 10 через червяк 11 и, зубчатое колесо 12 сообщает заводной спиральной пружине 13 количество энергии, необходимое на восполнение потерь на трение в устройстве за период движения транспортной цепи 6.
По окончании выстоя микродвигатель 18 включается и выводит рычаг 17 и всю систему из положения неустойчивого равновесия, начинается новый цикл движения, происходящий аналогично предыдущему.
Таким образом, применение заводной спиральной пружины 13 позволяет снизить установочную мощность привода 10 и обеспечить его работу в номинальном режиме, обеспечивая тем са0
мым надежную работЈ всего устройства при высоком быстродействии. Формула изобретения
Устройство прерывистого движения замкнутого рабочего органа конвейера, содержащее закрепленные на основании направляющие, установленное в
направляющих с возможностью возврат но-поступательного перемещения и взаимодействия с упругим элементом поступательное звено, расположенные на поступательном звене два привод5 ных толкателя для поочередного взаимодействия с противоположными ветвями рабочего органа, и механизм фиксации поступательного звена с приводом, отличающееся тем,
что, с целью повышения надежности работы устройства, оно снабжено установленным на основании приводным валом, жестко закрепленной на нем звездочкой для взаимодействия с замк5 нутым рабочим органом и поворотным элементом, расположенным на приводном валу и связанным с ним посредством заводной спиральной пружины. Ъ
| Привод прерывистого движения конвейера | 1986 |
|
SU1402746A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
