Изобретение относится к промышленному трансиорту, касается загрузочных устройств с возвратно-иоступательным движением грузоносителей, может найти применение в качестве перегрузчика складов тар- но-штучных крупногабаритных грузов и может быть использовано в различных областях нромышленности.
Целью изобретения является повышение надежности работы устройства.
На фиг. 1 изображено загрузочное устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 3.
Загрузочное устройство содержит установленную с возможностью возвратно-поступательного перемещения по направляющим 1 рамы 2 грузовую тележку 3, привод пере- .мещения которой выполнен в виде двух параллельно расположенных основной и дополнительной бесконечно замкнутых цепей 4, каждая из которых размещена в горизонтальной плоскости и связана с тележкой 3 через подвеску 5 посредством рычагов 6, яв- ляюи1ихся звеньями цепи. Каждый из рычагов 6 щарнирно закреплен на соответствующей цепи 4 и расположен в горизонтальной плоскости, при этом рычаги 6 расположены напротив друг друга и шарнирно связаны между собой посредством подвески 5. Подвеска 5 через шарнирное звено 7 соединена с центром тележки 3. Шарнирное звено 7 ог раничено упруги.м звено.м в виде двух закрепленных на нодвеске 5 пластинчатых пружин 8, поглощающих инерционные дина.мические на1 рузки.
Рычаги 6 тяговых цепей . гежат соосио в одной плоскости со свободным щарнирны.м концо.м 9, соединенны.м с подвеской 5 в центре делительной окружности звездочки. Тяговая цепь огибает приводную и холостую звездочки 10 и 11 и опирается на ролики 12, которые предохраняют ветви тяговой цепи от провисания с .минимальной потерей КПД.
Тяговая цепь приводится во вращение приводом, состоя иим из электродвигателя 13 и редуктора 14, на котором установлена открытая понижающая гитара шестерен 15 для привода двух цеппых контуров с возможностью движения наружной и внутренней ветвей в одну сторону. Привод смонтирован на раме 16, которая связана с механизмом натяжения цепных контуров посредством винта 17 с щарнирной заделкой 18.
После натяжки рама крепится болтовы.м соединением 19. Путь перемещения грузовой тележки равен межосевому расстоянию звездочек. Останов .может осуществляться как от концевых датчиков, так и от толчковой кнопочной етанции.
Шарнирное звено 7 состоит из вертикально установленного на тележке 3 пальца 20, на который для связи с подвеской 5 надет п ариирный подшипник 21, позволяю5
0
5
щий компенсировать перекосы от погрешностей тяговых цепей. Для удобства и простоты соединения тележки с подвеской и обеспечения точности сборки палец 20 соединяется с рамой тележки 3 через еъемный стакан 22, поставленный по посадке в отверстие по центру тележки и зафиксированный болтами. Палец 20 в стакане 22 крепится через шайбу 23 гайками 24. Рычаги 6 тяговых цепей 4 соединяются с подвеской 5 через
0 шарнирные подшипники 9, скользящие в пазах аналогично крышкам 25. Это предотвращает появление дополнительных нагрузок тяговых органов от боковых составляющих сил.
Подвеска 5 опирается на сферические концы осей 26 щарнирных подщипниковых рычагов 6, собственный вес подвески не воздействует на палец 20.
В месте еоединения шарнирного звена 7 с подвеской 5 через щарнирный подшипник 21 в корпусе подвески 5 выполнено отверстие 27 с двумя фигурными выемками 28 (фиг. 4) и установленными в нем напротив поеледних двумя ограничительными пластинчатыми пружинами 8, установленными с возможностью взаимодействия с подщипником 21 пальца 20. Выемки 28 для обеспечения изгиба пружин расчитаны на максимальный ход пружины 8 и расположены в направлении перемещения тележки 3. Крепление пластинчатых пружин 8 одностороннее и производится с помощью болтов 29 с удобной стороны. Пунктиром на фиг. 4 показаны деформированные положения пружин в ту или другую сторону в зависи.мости от направления давления пальца 20 подшипника 21 на пружину 8.
Загрузочное устройство работает следующим образом.
Включением электродвигателя 13 приводят во вращение через гитару шестерен 15 и звездочки 10 тяговые цепи 4 и через шар- 0 нирную подвеску 5, связанную с цепными контурами, рычага.ми 6 грузовая тележка 3 перемещается в направлении, например, ука- занно.м стрелками на фиг. 2. Движение грузовой тележки 3 прекращается при достижении подвески 5 рычага.ми 6 крайних точек прямолинейного участка цепного контура концевыми выключателя.ми либо визуально в момент выстоя при обкатке рычагами 6 звездочек 9 и 10 от кнопочной станции, которая отключает электродвигатель.
Время выстоя вполне достаточно для отключения привода без тормоза. Возникающие при останове инерционные нагрузки гасятся установленными в Н1арнирном звене 7 пластичными пружинами 8.
Двигатель может не отключаться при 2 увязке времени взятия установки груза кра- ном-штабелером со временем движения тяговых цепей 4 до наружному участку звездочек 10 и И в момент выстоя.
0
5
5
0
После того, как кран-штабелер погрузчик заберет либо установит груз на загрузочное устройство, тяговая цепь 4 продолжает движение в том же направлении, при этом грузовая тележка 3 начинает перемещаться в обратном направлении и цикл повторяется.
Формула изобретения
Загрузочное устройство, содержащее раму с направляющими, установленную с возможностью возвратно-поступательного перемещения по направляющим, тележку с вертикально установленным пальцем и связанный через упругое звено с пальцем тележки привод перемещения тележки с бесконечно-замкнутой, тяговой цепью, отличающееся тем, что, с целью повышения на
5
дежности работы устройства, привод перемещения тележки снабжен параллельной основной бесконечно замкнутой цепи дополнительной бесконечно замкнутой цепью, причем .каждая бесконечно-замкнутая цепь размещена в горизонтальной плоскости и снабжена шарнирно закрепленным на ней и расположенным в горизонтальной плоскости рычагом, при этом рычаги расположе ны напротив друг друга и шарнирно связаны между собой посредство.м подвески, в которой выполнено отверстие с двумя выемками в направлении перемещения тележки, а упругое звено выполнено в виде двух закрепленных на подвеске пластинчатых пружин, установленных в отверстии подвески напротив выемок с возможностью взаимодействия с пальцем тележки.
/ ° J5 J3
Ш8
Фиг.2
29 29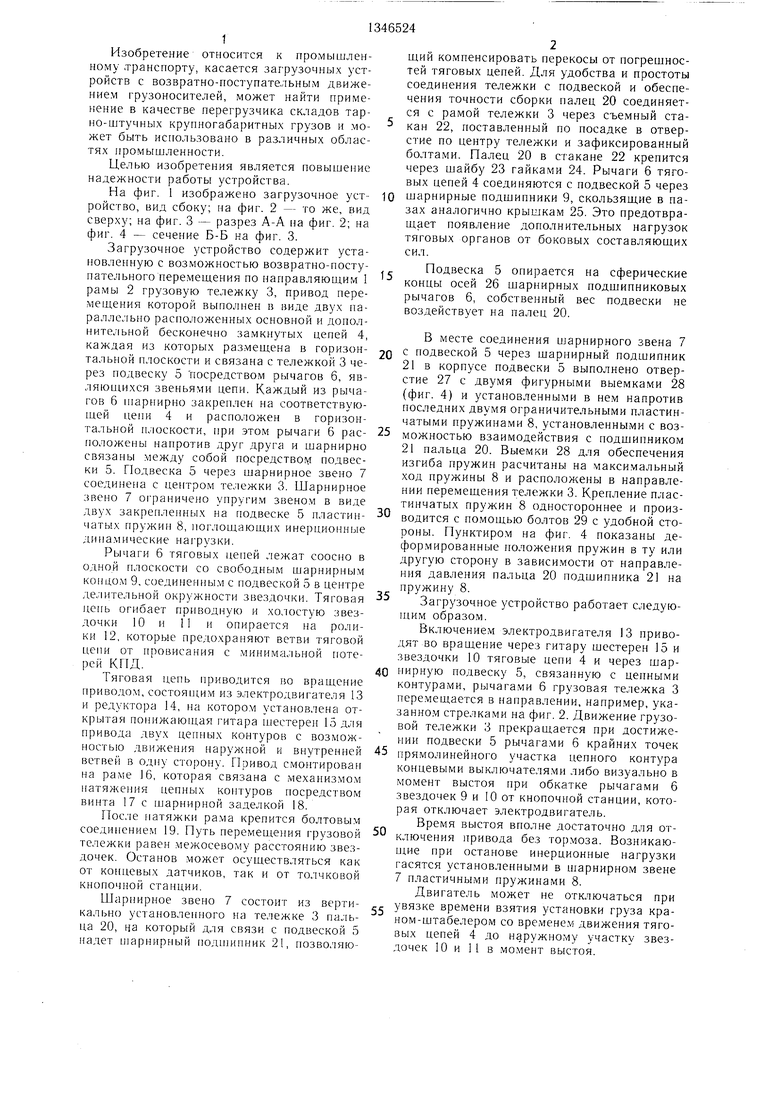

| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1981 |
|
SU1022893A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Транспортерное устройство | 1937 |
|
SU54413A1 |
| УСТРОЙСТВО для ЗАМОРАЖИВАНИЯ ПИЩЕВЫХ ПРОДУКТОВ | 1967 |
|
SU205839A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Вертикально-замкнутый накопительный конвейер | 1985 |
|
SU1399230A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |
| Цепная таль | 1990 |
|
SU1772077A1 |
Изобретение относится к промышленному транспорту и касается загрузочных устройств с возвратно-поступательным движением грузоносителей. Цель - повышение надежности работы устройства. Грузовая тележка (Т) 3 с вертикально установленным пальцем 20 установлена с возможностью возвратно-поступательного перемещения по направляющим фамы устройства. Привод перемещения Т 3 выполнен в виде двух параллельно расположенных основной и дополнительной бесконечно замкнутых пепей 4. Каждая цепь 4 размешена в горизонтальной плоскости, на которой шарнирно закреплен и расположен в горизонтальной плоскости рычаг (Р) 6. Расположены Р 6 цепей 4 один напротив другого и связаны между собой подвеской 5, в которой выполнено отверстие с двумя выемками в направлении перемещения Т 3. В отверстии подвески 5 напротив ее выемок закреплено упругое звено в виде пластинчатых пружин 8 с возможностью взаимодействия с пальцем 20 и приводом перемещения Т 3. При движени цепей 4 через подвеску 5 с помощью Р 6 Т 3 перемещается. Движение Т 3 прекращается при достижении подвеской 5 Р 6 крайних точек прямолинейного участка цепного контура. Вре.мя выстоя достаточно для отключения привода без тормоза. Возникающие при остановке инерционные нагрузки гасятся пружинами 8. 4 ил. (Л с: А-А со 4 с:) СП ГчЭ 4
фиг.
Составитель Л. Расторгуева
Техред И. ВересКорректор М. Шароши
Тираж 775Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое преднриятие, г. Ужгород, ул. Проектная, 4
| Способ остановки в заданной позиции тележки с тяговым органом,имеющим упругое звено | 1980 |
|
SU973458A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Загрузочное устройство | 1981 |
|
SU1022893A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
