Изобретение относится к измерительной технике и может быть использовано для измерения расстояний до объектов и отклонений их формы поверхности.
Цель изобретения - повышение точности измерения путем устранения погрешности начальной выставки одного из двух проекционных каналов относительно контролируемой поверхности.
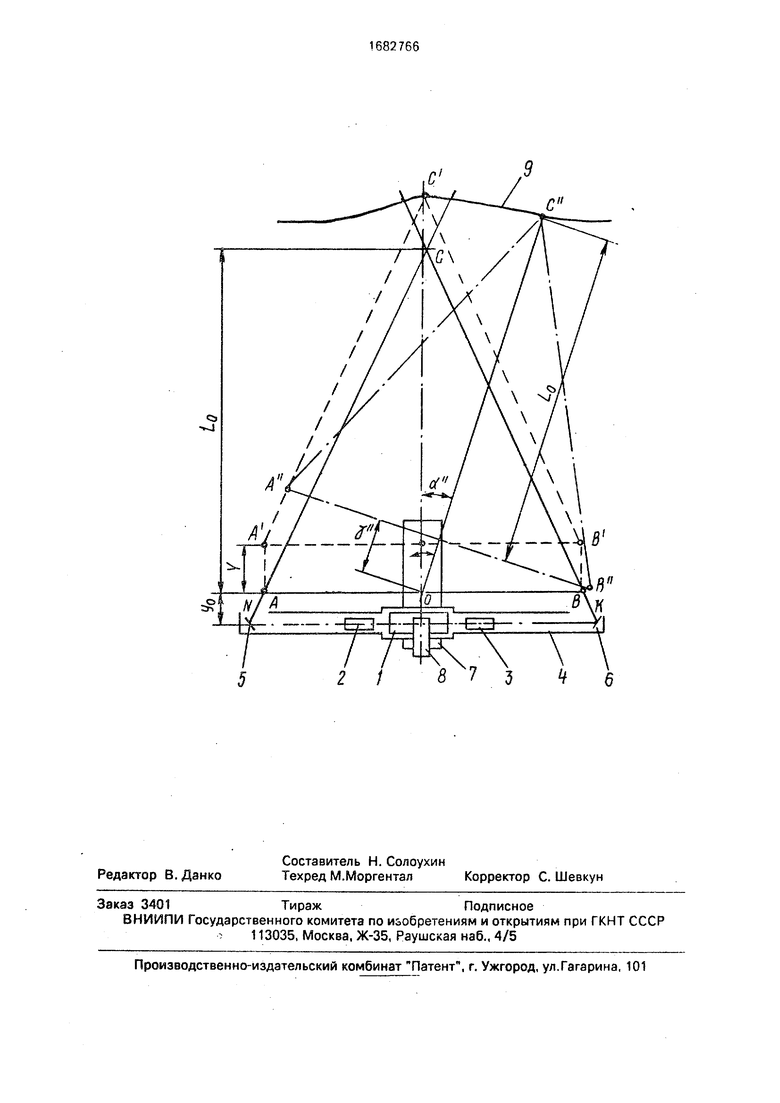
На чертеже приведена принципиальная схема измерений данным способом.
На схеме изображены источник 1 света, например лазер, два объектива 2,3, в фокусе которых расположены световые марки, штанга 4, зеркала 5, 6, установленные на
концах штанги на известном (базовом) расстоянии друг от друга, столик 7, установленный с возможностью линейного перемещения вдоль перпендикуляра к штанге и с возможностью углового поворота вокруг оси 0, и зрительная труба 8.
Источник 1 света, объективы 2, 3 и зрительная труба 8 соединены со штангой 4, закрепленной на столике 7, который имеет отсчетные приспособления его линейных и угловых перемещений (не показаны). Контролируемая поверхность обозначена позицией 9.
На чертеже обозначены: Y0 - расстояние между осью поворота столика и оптичео
00
го
Х| Os
о
ской осью объективов 2, ,3; 10 - номинальное значение расстояния до контролируемой поверхности; Y(Y ) - линейное перемещение столика (базы) до совмещения изображений световых марок на контролируемой поверхности; АВ(А В ХА В) - концы базового расстояния; С(С )(С) - точка совмещения изображений световых марок.
Способ осуществляют следующим образом.
Предварительно определяют о, для чего совмещают изображение световых марок с центральной точкой вспомогательного шаблона, расположенного перед контролируемой поверхностью, затем, поворачивая столик 7 со штангой 4 вокруг оси 0 и линейно перемещая его, совмещают изображения марок с двумя метками шаблона, расположенными на расстояниях Li, La, соответственно, по разные стороны от центральной метки.
Фиксируют при этом линейные перемещения столика YI и Y2 и вычисляют значение LO из следующей зависимости
I LiLz(Li+U)-L2Y1 -LiYJ
2 ( L2 Yii + Ц Y2 )
После этого проектируют световые марки, подсвеченные источником 1 света с помощью объективов 2, 3 и зеркал 5, б на контролируемую поверхность 9. Каждое изображение световой марки формируют в виде пары штрихов различной длины. В случае совмещения штрихов меньшей длины друге другом на контролируемой поверхности расстояние от базы АВ до точки С будет равно LO. Наблюдение за совмещением изображений световых марок ведут с помощью зрительной трубы 8.
При несовпадении точки с контролируемой поверхностью на последней будут наблюдаться две пары штрихов. По положению коротких штрихов изображений марок определяют положение точки С относительно контролируемой поверхности 9, а следовательно, направление перемещения столика 7 относительно объекта. Перемещают столик 7 с расположенными на нем штангой 4 с проекционными объективами 2, 3 и зеркалами 5, 6 до тех пор, пока короткие штрихи двух изображений световых марок
не совместятся между собой на контролируемой поверхности, и фиксируют значение линейного перемещения столика 7.
Определяют величину расстояния до
контролируемой поверхности из зависимости
L - Lo + Y.
Формула изобретения 1. Способ бесконтактного измерения
расстояний до объекта, заключающийся в том, что устанавливают два проектора на базовом расстоянии один от другого так, что точка пересечения их осей находится на расстоянии, равном номинальному расстоянию до объекта, проецируют два изображения световых марок на поверхность контролируемого объекта, совмещают их, Фиксируют изменение пространственного положения осей проекторов и по этому изменению судят о расстоянии до объекта, отличающийся тем, что, с целью повышения точности измерения, предварительно устанавливают перед контролируемым объектом шаблон с тремя метками,
последовательно совмещают изображения световых марок с крайними метками шаблона, совмещение осуществляют перемещением базы с проекторами вдоль перпендикуляра к самой базе, а расстояние до контролируемого объекта определяют из зависимости
L - U + Y,
где Y - величина линейного перемещения базы до совмещения изображений световых
марок на объекте;
Lo - номинальное расстояние от базы до объекта, равное
40
LO
UL2(Li +L.2 ) - L.2 Y - Li Y% 2 ( U Yii + Li Y2 )
где Li, La - расстояния крайних меток шаблона от центральной;
Yi, Ya - линейное совмещение лроекто- ров при совмещении изображений световых марок с крайними метками шаблона.
2. Способ по п. 1, отличающийся тем, что формируют изображение каждой световой марки в виде двух штрихов различной длины, а перемещение осуществляют до совмещения друг с другом штрихов меньшей длины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разбивочных работ в строительстве | 1984 |
|
SU1224583A1 |
| Способ определения планового положения точек объекта и устройство для его осуществления | 1981 |
|
SU979852A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| АБЕРРОМЕТР С СИСТЕМОЙ ТЕСТИРОВАНИЯ ОСТРОТЫ ЗРЕНИЯ (ВАРИАНТЫ), УСТРОЙСТВО И СПОСОБ ЕГО НАСТРОЙКИ | 2004 |
|
RU2268637C2 |
| Оптико-электронное устройство для контроля положения объекта | 1986 |
|
SU1435936A1 |
| БИБЛИОТЕКА | 1973 |
|
SU390351A1 |
| Двухкоординатное оптическое измерительное устройство | 1990 |
|
SU1783293A1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| Автоколлиматор | 1987 |
|
SU1511591A1 |
Изобретение позволяет измерять расстояние или отклонение формы поверхности крупногабаритных объектов, например цилиндрических нефтеналивных резервуаров. Целью изобретения является повышение точности измерения путем уменьшения погрешности начальной выставки одного из двух проекционных каналов относительно контролируемой поверхности. Формируют с помощью двух проекционных каналов, каждый из которых содержит световую марку, объектив и зеркало, два изображения световых марок, образованные двумя световыми штрихами различной длины. Проектируют их с концов базового расстояния на контролируемую поверхность под постоянным параллактическим углом. Совмещают короткие штрихи изображений световых марок друг с другом на контролируемой поверхности посредством линейного перемещения базы вдоль перпендикуляра к ней и по ее линейному перемещению судят о контролируемом размере и отклонении его от номинального значения. 1 з. п. ф-лы, 1 ил. У Ј
2 1
8 7 з 46
| Устройство для обмера криволинейных поверхностей | 1981 |
|
SU1352208A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
