Qs
00
го
00
го о
Изобретение относится к весоизмерительной технике.
Цель изобретения - повышение точности.
Способ взвешивания движущихся обь- ектов заключается в том, что на пути движения объекта последовательно размещают несколько измерительных участков с силоизмерительными датчиками, путевые датчики размещают перед первым измерительным участком, по их сигналам определяют скорость движения объекта и расстояние между его осями, производят последовательное измерение сигналов си- лоизмерительных датчиков с частотой, равной отношению скорости движения к длине измерительного участка, формируют периодический сигнал суммированием прямых сигналов от нечетных силоизмерительных датчиков и инверсных сигналов от четных силоизмерительных датчиков, который после цифровой фильтрации используют для вычисления веса.
Сущность способа заключается в том, что при перемещении движущегося объекта по измерительным участкам формируется периодический сигнал, амплитуда которого прямо пропорциональна весу движущегося объекта и только. Частота опроса датчиков силоизмерительных определяется выражением
,
где I - длина измерительного участка; v - скорость движения объекта, определяемая по сигналам путевых датчиков, расположенных перед измерительными участками на заданном расстоянии друг от друга. Сигналы силоизмерительных датчиков задерживаются на величину, определяемую скоростью движения объекта, с тем, чтобы после окончания сигнала с предыдущего датчика начинался сигнал со следующего. Таким образом путем суммирования прямых сигналов от нечетных датчиков и инверсных сигналов от четных датчиков имеем периодический сигнал. Затем осуществляется адаптивная фильтрация полученного сигнала цифровым фильтром, настроенным на частоту максимальной гармоничэской составляющей, равной f v/l. Амплитуда выделеннойгармоникипрямопропорционально зависит от веса движущегося объекта.
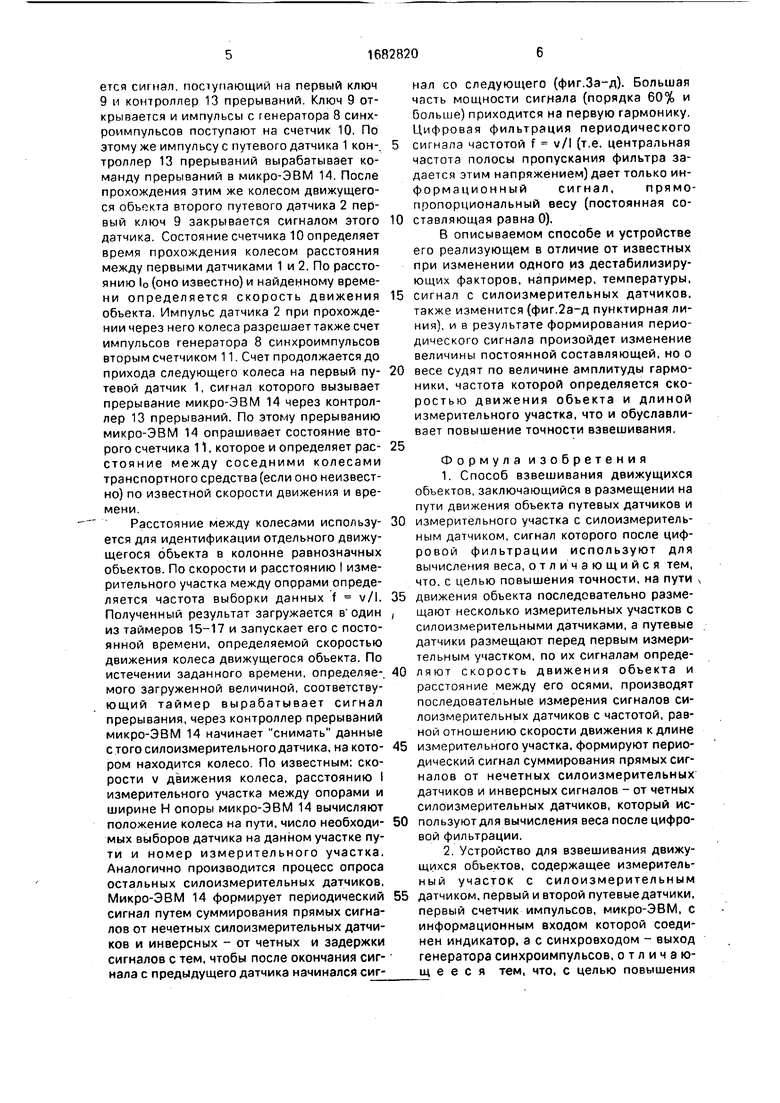
На фиг.1 показана структурная схема устройства для взвешивания движущихся объектов, в котором реализован описанный способ; на фиг.2 - расположение измерительных участков и путевых датчиков; на
фиг.З - графики, поясняющие процесс формирования периодического суммарного сигнала.
Устройство содержит первый 1 и второй
2 путевые датчики, силоизмерительные датчики, общее количество которых может быть различным, мультиплексор 6, клавиатуру 7 ввода данных, генератор 8 синхроимпульсов, первый ключ 9, первый 10 и второй 11
0 счетчики и второй ключ 12, контроллер 13 прерываний, микроЭВМ 14, программируемые таймеры 15-17 (их количество может быть различным) и индикатор 18.
Выходы силоизмерительных датчиков
5 соединены соответственно с входами мультиплексора 6. Выход мультиплексора 6 подключен к информационным входам (шине) микро-ЭВМ 14. Выходы путевых датчиков 1 и 2 соединены с первыми и вторыми
0 входами ключей 9 и 12 и первым и вторым входами контроллера 13 прерываний. Остальные входы контроллера 13 прерываний связаны с соответствующими выходами таймеров 15-17, входы которых соединены с
5 информационным входоммикро-ЭВМ 14. Выход контроллера 13 прерываний подключен к информационному входу микро-ЭВМ 14. Выход генератора 8 синхроимпульсов соединен с третьими (управляющими) вхо0 дами ключей 9 и 12 и синхровходом микро- ЭВМ 14, а информационный вход микро-ЭВМ 14 - с входом индикатора 18. Выходы ключей 9 и 12 соединены с входами счетчиков 10 и 11, выходы которых соедине5 ны с информационным входом микро-ЭВМ 14, к которому подключена также клавиатура 7,
Перед измерительными участками расположены первый 1 и второй 2 путевые дат0 чики на растоянии 0 между собой, и на расстоянии S от второго датчика 2 расположен конец опоры первого измерительного участка, Измерительные участки (всего их N) по краям прикреплены к опо5 рам, а в центрах содержат силоизмерительные датчики. Расстояние измерительного участка между опорами равно I. Расстояние S выбирается, исходя из времени, необходимого для выполне0 ния требуемых вычислений и инициализации аппаратных средств к приему информации. Измерительный участок представляет собой железобетонное основание с жестко встроенными стальными
5 несущими (на железной дороге - это рельсы).
Работает устройство следующим образом.
При прохождении колеса движущегося объекта через первый датчик 1 вырабатывэегся . поступающий на первый ключ 9 и контроллер 13 прерываний. Ключ 9 открывается и импульсы с генератора 8 синхроимпульсов поступают на счетчик 10. По этому же импульсу с путевого датчика 1 контроллер 13 прерываний вырабатывает команду прерываний в микро-ЭВМ 14. После прохождения этим же колесом движущегося объекта второго путевого датчика 2 первый ключ 9 закрывается сигналом этого датчика. Состояние счетчика 10 определяет время прохождения колесом расстояния между первыми датчиками 1 и 2. По расстоянию 1о (оно известно) и найденному времени определяется скорость движения объекта. Импульс датчика 2 при прохождении через него колеса разрешает также счет импульсов генератора 8 синхроимпульсов вторым счетчиком 11. Счет продолжается до прихода следующего колеса на первый путевой датчик 1, сигнал которого вызывает прерывание микро-ЭВМ 14 через контроллер 13 прерываний. По этому прерыванию микро-ЭВМ 14 опрашивает состояние второго счетчика 11,которое и определяет рас- стояние между соседними колесами транспортного средства (если оно неизвестно) по известной скорости движения и времени.
Расстояние между колесами используется для идентификации отдельного движущегося объекта в колонне равнозначных объектов. По скорости и расстоянию I измерительного участка между опррами определяется частота выборки данных f v/l. Полученный результат загружается в один из таймеров 15-17 и запускает его с постоянной времени, определяемой скоростью движения колеса движущегося обьекта. По истечении заданного времени, определяемого загруженной величиной, соответствующий таймер вырабатывает сигнал прерывания, через контроллер прерываний микро-ЭВМ 14 начинает снимать данные с того силоизмерительного датчика, на котором находится колесо. По известным: скорости v движения колеса, расстоянию I измерительного участка между опорами и ширине Н опоры микро-ЭВМ 14 вычисляют положение колеса на пути, число необходимых выборов датчика на данном участке пути и номер измерительного участка. Аналогично производится процесс опроса остальных силоизмерительных датчиков. Микро-ЭВМ 14 формирует периодический сигнал путем суммирования прямых сигналов от нечетных силоизмерительных датчиков и инверсных - от четных и задержки сигналов с тем, чтобы после окончания сигнала с предыдущего датчика начинался сигнал со следующего (фиг.За-д). Большая часть мощности сигнала (порядка 60% и больше) приходится на первую гармонику. Цифровая фильтрация периодического
сигнала частотой f v/l (т.е. центральная частота полосы пропускания фильтра задается этим напряжением) дает только информационный сигнал, прямо- пропорциональный весу (постоянная со0 ставляющая равна 0).
В описываемом способе и устройстве его реализующем в отличие от известных при изменении одного из дестабилизирующих факторов, например, температуры,
5 сигнал с силоизмерительных датчиков, также изменится (фиг.2а-д пунктирная линия), и в результате формирования периодического сигнала произойдет изменение величины постоянной составляющей, но о
0 весе судят по величине амплитуды гармоники, частота которой определяется скоростью движения объекта и длиной измерительного участка, что и обуславливает повышение точности взвешивания.
5
Формула изобретения
1.Способ взвешивания движущихся объектов, заключающийся в размещении на пути движения объекта путевых датчиков и
0 измерительного участка с силоиэмеритель- ным датчиком, сигнал которого после цифровой фильтрации используют для вычисления веса, отличающийся тем, что, с целью повышения точности, на пути
5 движения объекта последовательно размещают несколько измерительных участков с силоизмерительными датчиками, а путевые датчики размещают перед первым измерительным участком, по их сигналам опреде0 ляют скорость движения объекта и расстояние между его осями, производят последовательные измерения сигналов силоизмерительных датчиков с частотой, равной отношению скорости движения к длине
5 измерительного участка, формируют периодический сигнал суммирования прямых сигналов от нечетных силоизмерительных датчиков и инверсных сигналов - от четных силоизмерительных датчиков, который ис0 пользуют для вычисления веса после цифровой фильтрации.
2.Устройство для взвешивания движущихся объектов, содержащее измерительный участок с силоизмерительным
5 датчиком, первый и второй путевые датчики, первый счетчик импульсов, микро-ЭВМ, с информационным входом которой соединен индикатор, а с синхровходом - выход генератора синхроимпульсов, отличающееся тем, что, с целью повышения
точности, в него введены дополнительные измерительные участки с силоизме- рительными датчиками, мультиплексор, второй счетчик, программируемые таймеры, контроллер прерывания, клавиатура ввода данных и первый и второй ключи, причем выходы силоизмеритель- ных датчиков через мультиплексор соединены с информационной шиной микро-ЭВМ, с которой соединены входы программируемых таймеров, выходы первого и второго счетчиков, выход контроллера прерывания и выход клавиатуры ввода данных, -информациейные
to . . SI Н
0
входы первого и второго ключей и два входа контроллера прерываний подключены к выходам первого и второго путевых датчиков, размещенных перед первым измерительным участком, управляющие входы первого и второго ключей подключены к выходам генератора синхроимпульсов, а выходы - к входам соответственно первого и второго счетчиков.
3. Устройство по п.2, отличающее- с я тем, что края измерительных участков жестко закреплены, а силоизмерительные датчики расположены по центрам измерительных участков.
1R
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
Изобретение позволяет повысить точность взвешивания грузов, транспортируемых транспортными средствами, в движении. Для этого на пути движения объекта последовательно размещают несколько измерительных участков с силоиз- мерительными датчиками 3-5, а путевые датчики 1 и 2 размещают перед первым измерительным участком, и по их сигналам определяют скорость движения объекта и расстояние между .его осями. Затем производят последовательное измерение сигналов силоизмерительных датчиков с частотой, равной отношению скорости движения к длине измерительного участка, формируют периодический сигнал суммированием прямых сигналов от нечетных силоизмерительных датчиков и инверсных сигналов от четных силоиэмерительных датчиков, которые после цифровой фильтрации используют для вычисления веса. 2 с. и 1 з.п. ф-лы, 3 ил.
гг
гг
Оснобание
а
t
Е.Савина
s
Фи.3
Составитель В.Ширшов Техред М.Моргентал
L&J
LЈJ
Фиг. Z
Корректор М.Пожо
| Патент США N | |||
| 4049069, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
