Изобретение относится к весоизмерительной технике, может быть использовано для взвешивания железнодорожных вагонов, чугуновозных ковшей и других движущихся объектов, и является усовершенствованием известного устройства, описанного по авт. св. № 1183839. Целью изобретения является повышение точности взвешивания движущихся объектов за счет уменьшения искажения полезной составляющей сигнала при его обработке. На фиг.1 представлена блок-схема устройства; на фиг.2 - временные диаграмШ), поясняющие работу устройства (жирной линией выделен входной измерительный сигнал, а тонкой - добавленная часть сигнала, обрабатываемая цифровым фильтром). В основном изобретении описано устройство для взвешивания движущихся объектов, содержащее силоизмерительный преобразователь, встроенный в весовую платформу, путевые датчики, микропроцессорное вычислительное устройство (МВУ), блок памяти, счетчик с устройством управления, два регистра и два устройства сравнения. Силоизмерительный преобразователь подключен к входу ЬГОУ и выходу блока памяти, вход которого сое динен с выходом МВУ. Выходы устройст сравнения соединены с информационными входами устройства управления счетчиком, управляющий вход которого подключен к путевым датчикам, первый выход соединен с входомпрерывания МВУ, а второй - с первым входом сче чика, второй и третий входы последнего соединены с синхронизированным выходом МВУ и выходом первого регис ра соответственно. Выход счетчика подключен к вxoдv МВУ и объединенным входам устройств сравнения, вторые входы которых соединены с выходами соответствующих регистров, входами соединенных с выходом МВУ. Известное устройство осзпцествляе подавление динамической помехи, воз никающей при взвешивании движущихся объектов, путем их цифровой фильтра ции. Причем фильтрации подвергается сигнал, в котором искусственно увеличено число периодов помехи в окне наблюдения фильтра до требуемого дл качественной фильтрации. Искусствен ное увеличение числа периодов поме52хи достигается за счет многократного воспроизведения дискретных отсчетов входного сигнала, находящихся между локальными экстремумами (горбами) входного сигнала, содержащимися как минимум половину периода низкочастотной динамической помехи и хранящимися в блоке памяти устройства. Воспроизведение дополнительного числа периодов помехи в обрабатываемом сигнале, реализованное в известном устройстве (прототипе), искажает его форму, а значит и постоянную составляющую, вызывая дополнительную погрешность в измерении веса. Устройство (фиг.1) содержит весовую платформу 1, путевые датчики 2 и 3, силоизмерительный преобразователь 4, встроенный в платформу, микропроцессорное вычислительное устройство (МВУ) 5, в которое входит центральный процессор (ЦП) 6, постоянное запоминающее устройство (ПЗУ) 7, устройство управления (УУ) 8 и синхрониэатор (СХ) 9. Вход МВУ 5 соединен с выходами силоизмерительного преобразователя 4 и блока памяти 10. Вход прерывания МВУ 5 соединен с выходом устройства управления 11 счетчиком 12, второй вход которого подключен к путевым датчикам 2 и 3, а выход - к счетчику 12, второй вход которого соединен с синхронизирующим выходом МВУ 5, а выход подключен ко входу МВУ 5 и входам устройств сравнения 13 и 14. Выход МВУ 5 подключен ко входу блока памяти 10, к индикатору 15 и входам регистров 16 и 17. Выходы регистров 16 и 17 подключены к вторым входам устройств сравнения 13 и 14 соответственно, причем выход регистра 16 дополнительно подключен совместно с выходом триггера 18 к третьему входу счетчика 12. Выходы устройств сравнения 13 и 14 соединены с входами устройства управления 11 счетчиком 12, причем выход устройства управления 14 дополнительно подключен к первому вхоДУ триггера 18, второй вход которого соединен с входом прерывания МВУ 5. Устройство работает следующим образом. При наезде колеса на весовую платформу 1 срабатывает путевой датчик 2, по сигналу с которого запускается устройство управления 11 счетчиком. Устройство управления 11 вырабатывает сигнал прерывания, поступающий на ЦП 6 МВУ 5 и триггер 18, по которому начинает работать программа обработки информации, записанная в ПЗУ 7 МВУ 5, а триггер 18 устанавливается в исходное (нулевое) состояние. С преобразователя 4 через вход данных в №У 5 принимается информация об измеряемом весе с периодом опроса, соответствующим частоте дискретизации f. Все дискретные отсчеты веса записываются в блок памяти 10 и одновременно путем сравнения дискретных отсчетов и их адресов в ЦП 6 производится поиск экстремумов (горбов) входного сигнала. Адреса ячеек блока памяти 10, в которых записаны значения последних из экстремумов измеренного сигнала N., и заносятся соответственно в регистры 16 и 17,
причем в регистр 17 заносится адрес последнего горба.
По сигналу с путевого датчика 3, сигнализирующему о съезде колеса с платформы 1, устройство управления 11 25 счетчиком 12 вьфабатывает сигнал, по которому ЦП 6 переводится на выполнение подпрограммы цифровой фильтрации, алгоритм которой записан в ПЗУ 7. Для получения высокой точности из-зо водится 1мерения веса, например 0,1%, при на |личии динамической помехи амплитудой 10-20% от полезного сигнала, необходимо обеспечить подавление этой п мехи на 40-50 дБ. Получение такой степени подавлени при ограниченном времени измерения возможно цифровыми фильтрами, обычно синтезированными методом временных окон. В предлагаемом устройстве используется нерекурсивный цифровой фильтр с окном Дольфа-Чебышева, постоянная с;оставляющая в котором определяется по формуле x(k).W(k), где W - Z: W(k); I/ rv - число отсчетов в окне наблюдения ; x(k) - временные отсчеты входного сигнала; W(k) - временные отсчеты окна; у - постоянная составляюп(ая входного сигнала. 12
давление и в то же время минимально искажается сигнал, подвергаемый обработке, по сравнению с реальным измеренным.
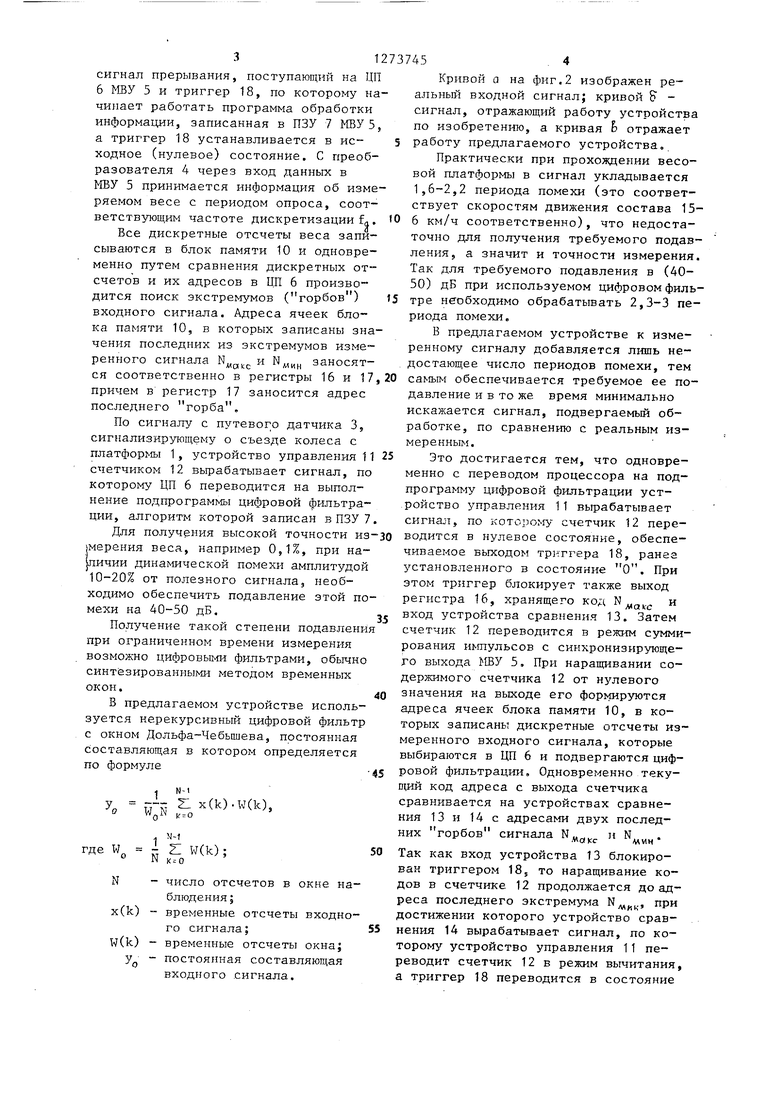
Это достигается тем, что одновременно с переводом процессора на подпрограмму цифровой фильтрации уст.ройство управления 11 вырабатывает сигнал, по которому счетчик 12 пере45. 4 Кривой а на фиг.2 изображен реальнь01 входной сигнал; кривой 5 сигнал, отражающий работу устройства по изобретению, а кривая Ь отражает работу предлагаемого устройства. Практически при прохождении весовой платформы в сигнал укладывается 1,6-2,2 периода помехи (это соответствует скоростям движения состава 156 км/ч соответственно), что недостаточно для получения требуемого подавТак для требуемого подавления в (4050) дБ при используемом цифровом фильтре необходимо обрабатывать 2,3-3 периода помехи. В предлагаемом устройстве к измеренному сигналу добавляется лишь недостающее число периодов помехи, тем самым обеспечивается требуемое ее пов нулевое состояние, обеспечиваемое выходом трнтгера 18, ранее установленного в состояние О. При этом триггер блокирует также выход регистра 16, хранящего код N,. и вход устройства сравнения 13. Затем счетчик 12 переводится в режим суммирования и тульсов с синхронизирующего выхода МВУ 5. При наращивании содержимого счетчика 12 от нзлевого значения на выходе его фор 1ируются адреса ячеек блока памяти 10, в которых записаны дискретные отсчеты измеренного входного сигнала, которые выбираются в ЦП 6 и подвергаются цифровой фильтрации. Одновременно текущий код адреса с выхода счетчика сравнивается на устройствах сравнения 13 и 14 с адресами двух последних горбов сигнала N,, и N. Так как вход устройства 13 блокирован триггером 18, то наращивание кодов в счетчике 12 продолжается до адреса последнего экстремума Nд,., при достижении которого устройство сравнения 14 вырабатывает сигнал, по которому устройство управления 11 переводит счетчик 12 в режим вычитания, а триггер 18 переводится в состояние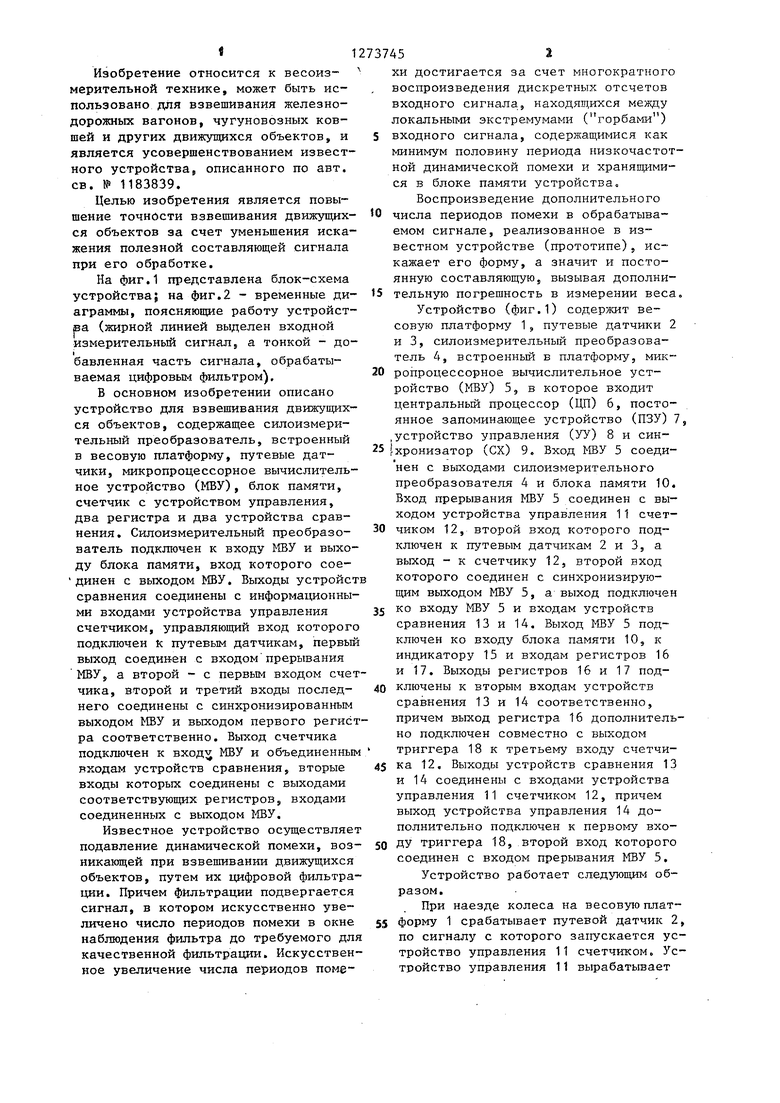
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Устройство для взвешивания | 1986 |
|
SU1362944A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1571415A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Устройство для взвешивания движущихся железнодорожных составов | 1982 |
|
SU1089427A1 |
Изобретение относится к весоизмерительной технике и позволяет повысить точность взвешивания движущихся объектов. Для этого к измеренному сигна.пу добавляется лишь недостающее число периодов помехи, тем самым обеспечивается ее подавление и в то же время минимальное искажение сигнала. Это достигается тем, что одновременно с переводом процессора 6 на подпрограмму цифровой фильтрации устройство 11 управления вырабатываетсигнал, по которому счетчик 12 переводится в нулевое состояние, обеспечиваемое триггером 18, ранее установленное в состояние О. Триггер 18 блокирует вход регистра 16 и вход устройства 13 сравнения. Счетчик 12 переводится в режим суммирования импульсов с выхода вычислительного устройства 5. Так как вход устройства 13 сравнения блоi кирован триггером, то наращивание кодов в счетчике 12 продолжается до ад(О реса последнего экстремзт а сигнала, затем устройство 11 управления переводит счетчик 12 в режим вычитания, а впоследствии - и в режим суммирования. 2 ил. ю : ел м
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1183839A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
