Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания движущихся объектов.
Известен способ, который состоит в том, что объект перемещают по измерительной платформе,определяют моменты въезда и выезда на нее нагрузок, считают их число, определяют нечетные моменты по счету, в процессе которых и осуществляют измерение веса нагрузок.
Известен способ взвешивания движущихся объектов, согласно которому объект перемещается по измерительному участку, производится N измерений, начало и конец которых определяются по сигналам путевых датчиков, данные датчиков веса суммируются, фильтруются с целью подавления высокочастотных составляющих, оцифровываются, заносятся в ОЗУ, идентифицируется объект, данные фильтруются путем интегрирования с весовой функ цией.
Наиболее близким к предлагаемому является способ взвешивания движущихся объектов, по которому объект перемещают по измерительному участку, с силойзмерительного преобразователя, расположенного на нем, по сигналу путевого датчика снимаются данные с
О
К
сг
10
15
J17321
заданной частотой дискретизации,
заносятся в ОЗУ, выбираются значения максимального и минимального из них, затем после съезда транспортного средства с платформы по сигналу вто- 5 рого путевого датчика значения датчика, расположенные во временном интервале между двумя экстремальными показаниями, соответственно экстраполируются с целью получения хотя бы трех периодов динамической помехи, затем осуществляется фильтрация цифровым фильтром путем интегрирования с применением функции Дольфа-Чебы- шева, масштабирование, результат сравнивается с задаваемым порогом и в случае, когда оказывается меньше порогового, обработке подвергается реальная последовательность данных,
Способ обладает низкой точностью, так как никогда колебательная составляющая не присутствует в единственном числе и не Имеет чисто гармонический характер, т.е. практичес- ки никогда помеха не может быть представлена единственной синусоидой. Во всех практических применениях помехи имеют множественный характер ввиду колебаний движущихся объектов по нескольким степеням свободы. Ре- 0 альный сигнал обрабатывается только при взвешивании пустой тары, когда резонансная частота колебаний объекта на подвеске превышает 5 Гц, точность определения массы груза остается 35 низкой.
Целью изобретения является повышение точности измерения веса за / счет увеличения времени измерения путем разделения воздействия несколь- 40 ких нагрузок на один датчик веса.
Поставленная цель достигается тем, что согласно способу объект перемещают по измерительному участку, по сигналу путевого датчика сиг- 45 налы весовых датчиков оцифровывают и запоминают, производят цифровую фильтрацию интегрированием с применением весовой функции, сигналы всех датчиков перед оцифровыванием 50 фильтруют, после оцифровывания умножают на заданные коэффициенты, суммируют сигналы датчиков от одновременно воспринимаемых нагрузок, измеряют временные интервалы между на- §5 грузками, определяют по ним и длинам .измерительных участков число нагрузок, приходящихся на два ближайших измерительных участка, и число
0
5
21
5
0 5
0
5 0 5
75
одновременно воспринимаемых нагрузок, измеряют скорость движения ооъ- екта, а веса нагрузок вычисляют по измеренным величинам.
Скорость движения объекта определяется путем измерения времени продвижения объекта между двумя путевыми датчиками, а одновременно действующие нагрузки разделяются с помощью сингулярного разложения,
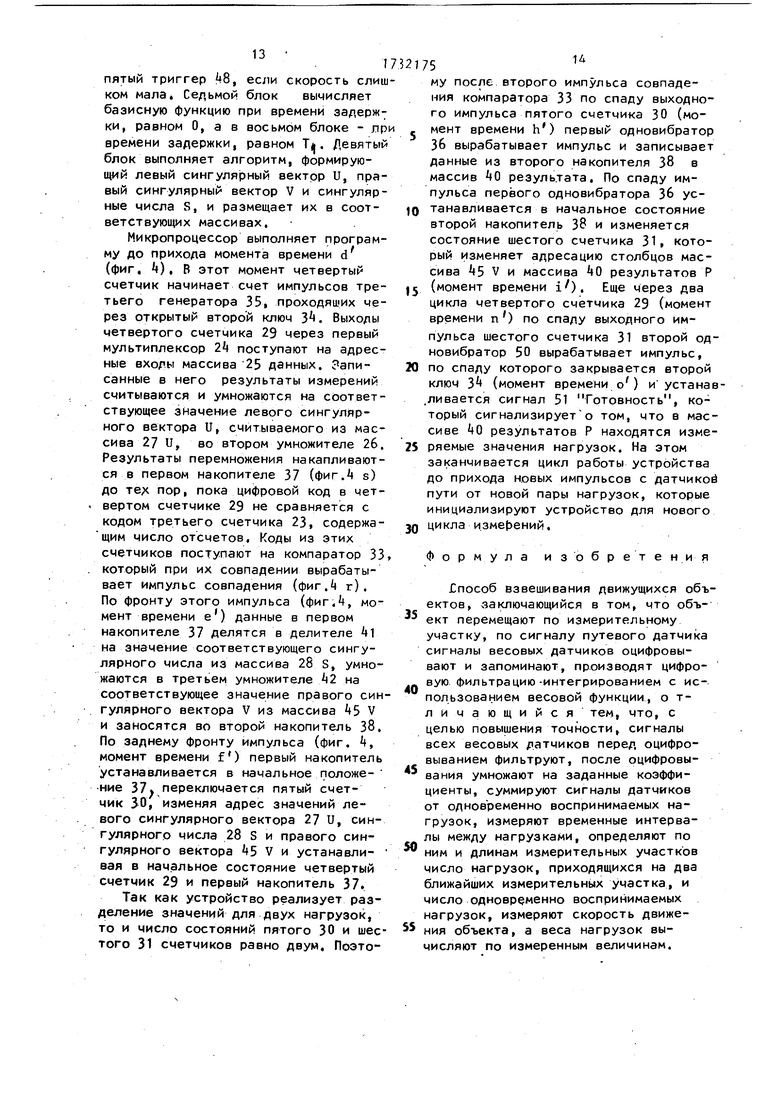
На фиг.1 изображен измерительный путь , на фиг,2 - часть измерительного пути при наличии двух нагрузок, на фиг.З - структурная схема устройства} на фиг, - временные диаграммы состояний блоков} на фиг.З - алгоритм работы микропроцессора.
Измерительный путь (фиг.1) с датчика (1) веса (а) и датчиками (2) пути состоит из Н измерительных участков (3) длинной L, На фиг,1 показана форма отклика датчиков веса (Ь) на перемещающуюся нагрузку, а сигнал с - форма результирующей передаточной функции всех измерительных участков пути, полученная после умножения функций каждого датчика веса на заданный коэффициент К и суммирования. Коэффициенты К определяются из минимума квадратичного отклонения синтезируемой передаточной функции от функции выбранного окна, например окна Хемминга. Коэф-- фициеьты определяются предварит-ельнс о помощью известных процедур, например сингулярного разложения.
Очевидно, что зависимость сигнала датчика веса от нагрузки будет описываться линейной зависимостью от координаты положения нагрузки относительно начала измерительного участка, которая будет иметь вид
Kj-Pj-X,(1)
если нагрузка находится на участке слева от датчика веса, и вид
K;«P.(L-X),(2)
если справа, где К; - коэффициент пропорциональности; PJ - значение веса j-й нагрузки{ X - координата положения нагрузки, На фиг,1 (Ь) приведена форма сигнала датчика веса, если на два соседних участка приходятся по одной нагрузке. На фиг.2 изображена часть измерительного пути при наличии двух нагрузок на двух соседних измерительных участках Vi условные сигналы, формируемые первой
$ 1
(b) и второй (с) нагрузкой по отдельности. Реальный сигнал, снимаемый с датчика веса, изображен на фиг.2 (d). Наличие нескольких нагрузок на двух соседних измерительных участках, т.е. воздействие на (один и тот же датчик веса, определяется суммой воздействий от каждой нагрузки. Так как это линейная операция, то воздействие передаточной характеристики измерительного пути осуществляется на каждую функцию нагрузки. В общем случае сигнал, полученный в результате измерения, будет описываться следующим выражением: R+RO м
Y-, Zl Spj(t) Qi(t-Ti)-Krt (з)
Га«в j«| J
где (h(t-Tj) - весовые функции окна, Т: - интервал времени между моментами въезда j-й и 0+1)-й нагрузок на r-й измерительный участок с коэффициентом пропорциональностиR - число измерительных участков, на которых одновременно находится М нагрузок, R0 - порядковый номер изме рительного участка, который пробегает зна чения от 1 до Н в соответствии с перемещением взвешиваемого объе кта.
По сигналам первого и второго путевых датчиков, установленных на заданном расстоянии друг от друга, измеряют скорость движения объекта, а по ней - расстояние между соседними нагрузками. Если это расстояние меньше 2L, то нагрузки воздействуют одновременно на один и тот же датчик веса и требуют разделения математически, т.е. должны рассматриваться как совокупность нескольких функций, Если расстояние между нагрузками превышает 2L, то нагрузки воздействуют одновременно на разные датчики и могут быть разделены физически на разные потоки данных. Независимые потоки данных позволяют обрабатывать их отдельно и упрощают задачу. Число нагрузок, входящих в одну совокупность данных, определяется путем подсчета следующих непрерывно друг за
32175
другом нагрузок, расстояние между которыми меньше 2L,
Требуемое значение для каждой
, нагрузки при поосном взвешивании из одновременно воспринимаемых можно определить с помощью сингулярного разложения следующим образом. По определенным интервалам задержки между
IQ нагрузками Т строят матрицу плана, которая состоит из базисных функций. Базисные функции представляют собой функцию выбранного окна, вычисленную в N точках с уметом времени 38U держки Tjt где N - число отсчетов В г-й точке базисные функции принимают вид
О; (t - Tj).(4)
20 Эта матрица имеет размер N-M, где М - число нагрузок в ранной совокупности данных. По матрице плана формируют левый U и правый V сингулярные векторы и матрицу сингулярных чисел S.
25 Яатем столбцы матрицы первого сингулярного вектора U(i, j) умножают на измеренные значения Yj и сумми- руют, Сумму делят на соответствующее сингулярное число Sj, затем полуэд ченные числа умножают построчно на матрицу правого сингулярного вектора V(k,j) и суммируют, т.е. М «г ттCi ;), у
РК-Ј- --н J
5 где k изменяется от 1 до М.
Эта операция сингулярного разложения имеет на входе последовательность отсчетов измеряемого сигнала, а на выходе - набор.значений множителей
к базисным функциям, по которым выполнялось разложение. В данном случае они представляют собой значения нагрузок, входящих в анализируемую совокупность данных. Одновременно
45 выполняется процесс фильтрации сигналов от содержащихся в них переменных составляющих помехи, фильтрации осуществляется за счет выбора передаточной функции измерительного
& пути в виде заданного окна при преобразовании физического параметра, которым является значение нагрузки, в электрический сигнал датчиков веса. Интегрирование входит в процедуру
55 сингулярного разложения по базисным
функциям.
Устройство для реализации предлэ - гаемого способа содержит (фиг.З)
первый 1, второй 2 и третий 3 датчики пути, Н датчиков 4 веса, Н аналоговых фильтров 5, Н аналого-цифровых преобразователей (АЦП) 6, Н первых умножителей 7, Н блоков 8 задания коэффициентов, сумматор 9, первый триггер 10, первый 11 и второй 12 элементы И, первый генератор 13 первый счетчик 14, первый регистр 15, второй счетчик 16, второй регистр 17, второй триггер 18, третий элемент И 19, микропроцессор 20, первый ключ 21, второй генератор 22, третий счетчик 23, первый мультиплексор 2k, массив 25 данных Y, второй умножитель 26, массив 27 U, массив 28 S, четвертый 29, пятый 30 и шестой 31 счетчики, второй мультиплексор 32, цифровой компаратор 33, второй ключ
34, третий генератор 35, первый од- новибратор 36, первый 37 и второй 38 накопители, четвертый триггер 39, массив 40 P, делитель 41, третий умножитель 42, выходной сигнал 43 Низкая скорость, выходной сигнал № Высокая скорость 1, массив 45 V, шестой триггер 46, четвертый элемент 47 И, пятый триггер 48, третий триггер 49, второй одновибратор 50, выходной сигнал 51 Готовность.
На временной диаграмме состояний блоков устройства (фиг. 4) латинскими буквами без штрихов обозначены состояния следующих блоков: а - сигнал первого путевого датчика 1, b и с - прямой и инверсный выходы первого триггера 10, d - выход первого элемента И 11, е - выход второго элемента И 12, f - состояние первого регистра 15, - выход второго путевого датчика 2, h - выход второго триггера 18, i - выход третьего1 элемента И 19, j - состояние второго регистра 17, k - выход третьего датчика 3 пути, 1 - инверсный выход третьего триггера 49, m - выход четвертого элемента И 47, п - состояние первого ключа 21 и первого мультиплексора 24, о - состояние третьего счетчика 23, р - состояние второго ключа 34 и второго мультиплексора 32, (} - состояние компаратора 331 г - сос тояние первого накопителя 37, s - -состояние второго накопителя 38, t - выход пятого счетчика 30, и - выход первого одновибратора 36, v - выход шестого счетчика 31, w - выход втооого одновибратора 50, х - сост/
0
5
ние шестого триггера 46 (латинские буквы со штрихами обозначают моменты времени процесса работы устройства),
В указанном устройстве в каждом из Н каналов последовательно соединены датчик 4 веса, аналоговый фильтр 5, /ЩП 6 и первый вход первого умножителя 7, выход которого соединен с соответствующими входами сумматора 9. Второй вход первых умножителей 7 связан с выходами блоков 8 задания коэффициентов, Выход первого датчика 1 пути связан с входом первого тригге- 5 ра 10 и первыми входами первого 11 и второго 12 элементов И, выход последнего соединен со стробирующим входом первого регистра 15, информационный вход Которого соединен с выходом первого счетчика 14.
Установочный вход первого счетчика 14 вместе с установочным вхо«- дом второго счетчика 16 соединен с выходом первого элемента И 11, второй вход которого связан с прямым выходом первого триггера 10, инверсный выход которого соединен с вторым входом второго элемента И 12. Выход первого генератора 13 связан со счетными входами первого 14 и второго 16 счетчиков, выход последнего соединен с входом второго регистра 17. Выход второго датчика 2 пути связан с входом второго триггера 18 и первым входом третьего элемента И 19, второй вход которого соединен с выходом второго триггера 18. Выход третьего элемента И 19 связан со стробирующим входом второго регистра 17, первым входом микропроцессора 20, разрешающим входом первого ключа 21, установочным входом третьего счетчика 23, первыми управляющими входами первого мультиплексора 24 и второго мультиплексора 32, входами установки в режим записи массива 25 данных Y и массивов 27 U, 28 S и 45 V. Выходы первого и второго регистров 15 и 17 соединены соответственно с вторым и третьим входами микропроцессора 20, Выход второго генератора 22 связан через первый ключ 21 со счетным входом третьего счетчика 23 и синхронизирующими входами АЦП 6 каждого из Н каналов.
Выход третьего датчика 3 пути соединен с входом третьего триггера 49 и первым входом четвертого элемента И 47, второй вход котоол0
5
0
5
O
5
го связан с выходом третьего триггера 49, а выход - с запрещающим входом первого ключа 21, вторыми управляющими входами первого 2k и второго 32 мультиплексоров, с разрешающим входом второго ключа 34, с установочными входами четвертого 29, пятого 30 и шестого 31 счетчиков, с входами установки в режим чтения массива 25 данных, массивов
27U, 28 S, 45 V и с первыми установочными входами первого 37 и второго 38 накопителей.
Выход третьего счетчика 23 соединен с первым мультиплексируемым входом первого мультиплексора 24 и первым входом компаратора 33i второй вход которого вместе с вторым мультиплексируемым входом первого мультиплексора 24 и первым мультиплексируемым входом второго мультиплексора 32 связан с выходом четвертого счетчика 29, Его счетный вход соединен с выходом второго ключа 34, вход которого соединен с выходом третьего генератора 35, а запрещающий вход вместе с входом шестого триггера 46 - с выходом второго одновибратора 50. Вторые установочные входы четвертого 29 и пятого 30 сметчиков вместе с вторыми установочными входами первого 37 и второго 38 накопителей соединены с выходом компаратора 33.
Выход пятого счетчика 30 связан с вторым мультиплексируемым входом второго мультиплексора 32 и входом первого одновибратора 36, выход которого соединен с входом записи массива 40 Р, третьим установочным входом второго накопителя 38 и счетным входом шестого счетчика 31. Выход шестого счетчика 31 связан с входом второго одновибратора 50 и третьим мультиплексируемым входом второго мультиплексора 32, четвертый, пятый и шестой мультиплексированные входы которого связаны соответственно с первым, вторым и третьим выходами микропроцессора 20. Четвертый выход микропроцессора 20 соединен с входом четвертого триггера 38, пятый выход с входом пятого триггера 48, а шестой - с входами данных массивов 27 U
28S и 45 V.
Первый выход второго мультиплексора 32 связан с первым адресным вхо дом массива 27 U, второй - с адресны
.
to
15
20
73 1/510
входом пассива 8 S, с вторым адресным входом массива 27 U и с первым адресным входом массива 45 V, а третий - с вторым адресным входом массива 45 V и адресным входом массива 40 Р, Выход массива 7 U связан с первым входом второго умножителя 26, второй вход которого соединен с выходом массива 25 Y данных, вход данных которого связан с выходом сумматора 9.
Адресный вход массива 25 данных Y связан с выходом первого мультиплексора 24. Выход второго умножителя 26 соединен с входом первого накопителя 37, выход которого соединен с первым входом делителя 41, Второй вход делителя 41 связан с выходом массива 28 S, а выход-- с первым входом ,третьего умножителя 42. Второй вход третьего умножителя 42 связан с выходом массива 45 V, а выход - с входом второго накопителя 38, выход
25 которого соединен с входом массива 40 Р. Выход четвертого триггера 39 ,является сигналом 44 Высокая ско- k рость, выход пятого триггера 48 - сигналом 43 Низкая скорость, а вы- 1ход шестого триггера 46 - сигналом 51 Готовность.
Пример. Путевые датчики 1-3 - серийно выпускаемые промышленностью типа БВК, датчики 4 веса могут быть любыми датчиками (тензометрическими,
35 механотронными, фотоэлектрическими и т.д.), Аналоговый фильтр 5 выпол - нен на операционном усилителе К544УД2, АЦП 6 - на 1108ПВ1, умножители 7, 26 и.42 и делитель 41 40 на МС КР1802ВР2. Блоки 8 собраны на программируемых МС ЗУ типа К155РЕЗ. Сумматор 9 и накопители 37 и 38 - сумматоры и регистры на МС серии К155 : К555, Элементы И 11, 12, 19
45 и 47 - МС К155ЛИ1, генераторы 13, 22 и 35 - МС серии К155, К55, К500. Счетчики 14, 16, 23, 29, 30 и 31 - МС К555ИЕ7. Триггеры 10, 18, 39, 46, 48 и 49 - МС К155ТМ2. Регистры 15
50 и 17 - МС К555ИР22. Микропроцессор
20- серийно выпускаемые промышленностью комплекты МК-01, К1-20. Ключи
21и 34 выполнены на логических элементах со стробированием и RS-триг55 гером для хранения состояний на МС серии К155« Мультиплексоры 24 и 32 - МС типа К555КП7, 9, 12. Массивы 25 Y, 27 U, 28 S, 40 Р и 45 V - МС серии КР537РУЮ, К555. Цифровой ком30
11
паратор 33 - МС 1Г555СП1. Пдновиб- раторы 36 и 50 - К155АП,3 с RS- цепями,
Устройство работает следующим об разом.
Путевые датчики 1 и 2 установлены перед измерительным участком, причем путевой датчик 1 на некоторо расстоянии перед участком, а дат- чик 2 - непосредственно перед началом измерительного участка. При проезде движущимся объектом первого путевого датчика 1 вырабатывается импульс (фиг.4 а), который уста- навливает первый триггер 10 в единичное состояние (фиг. 4 Ь). Прямой выход триггера 10 разрешает прохождение первого импульса первого датчика пути 1 через первый элемент 11 (фиг,4 d), а инверсный выход (фиг. с) - второму импульсу через второй элемент И 12 (фиг,4 е). Импульс с первого элемента И 11 устанавливает первый счетчик- 14 в начальное сое- тояние, и тот начинает счет им- пульсоа пеового генератора 13. Вто- |рой импульс с второго элемента И 12 переписывает значение первого счетчика 14 в первый регистр 15, фикси- руя тем самым временной интервал между нагрузками (фиг,A f). Одновременно с первым счетчиком 14 начинает счет импульсов второй счетчик 16 (фиг.4 j) и продолжает счет
до прихода импульса с второго дат35
чика 2 пути (фиг.4 g), который устанавливает второй триггер 18 в единичное состояние (фиг. 4 h) и выделяется третьим элементом И 19 (фиг,4 о.) . Этим импульсом код второго счет- чика 16, пропорциональный скорости движения объекта, переписывается во второй регистр 17 (фиг,4 j). Этот же импульс разрешает пропускание первым ключом 21 импульсов второго генера- тора 22 на третий счетчик 23 (фиг.4 п) и сбрасывает его в начальное состояние. Кроме того, он устанавливает первый мультиплексор 2k на подключение выходов третьего счетчи- ка 23 на адресные входы массива 25 данных Y, устанавливает массив 25, данных Y, массивы 27 U, 28 S и 45 V в режим записи (момент времени а , фиг. 4).55
С первого ключа 21 импульсы второ го генератора 22 через первый ключ 21 поступают на АЦП 6 всех каналов,
5 5
5
5
7512
которые оцифровывают сигнал с датчиков 4 веса, проходящий через аналоговые фильтры 5. Выходной сигнал каждого ЛЦП б перемножается на соответствующий коэффициент, содержащийся в блоках 8 задания коэффициентов каждого канала, в перемножителях 1, Выходные сигналы первых перемножителей 7 поступают на сумматор 9. Результаты суммирования с сумматора 9 записываются в массив 25 данных Y по адресам, устанавливаемым третьим счетчиком 23 через первый мультиплексор 24,
Процесс продолжается до съезда обеих нагрузок с измерительного пути (момент времени b , фиг.4), что определяется вторым сигналом с третьего датчика 3 пути (фиг.4 k), который устанавливает инверсный выход третьего триггера 49 в единицу и пропускается через четвертый элемент И 47 (фиг,4 1 и т) , Этот же импульс закрывает первый ключ 21, переключает первый мультиплексор 2k на пропускание адресных сигналов с четвертого счетчика 29, устанавливает в начальное состояние четвертый 29, пятый 30 и шестой 31 счетчики, разрешает хождение импульсов с третьего гене- V ратора 35 через второй ключ 34, переключает массив 25 данных Y, массивы 27 U, 28 S, 45 V в режим чтения и устанавливает в начальное состояние первый 37 и второй 38 накопители, i
В этот же интервал времени между
моментами с и d (фиг,4), получив сигнал второго датчика 3 пути, микропроцессор 20 начинает работу по приведенному алгоритму (фиг. 5). В первом блоке микропроцессор ожидает прихода импульса от второго датчика пути 2, Во втором блоке он снимает значения временной задержки Ъ между нагрузками с первого регистра 15 и между импульсами первого 1 и второго 2 датчиков пути от первой нагрузки с второго регистра 17. В третьем и четвертом блоках микропроцессор определяет расстояние между нагрузками и скорость движения объекта, идентифицирует объект. В пятом и шестом блоках определяет допустимость значения скорости объекта и устанавливает соответствующие сигналы 44 в четвертый триггер 39, если скорость слишком велика, и 43 - в
пятый триггер 8, если скорость слишком мала. Седьмой блок вычисляет базисную функцию при времени задержки, равном 0, а в восьмом блоке - лр времени задержки, равном Т. Девятый блок выполняет алгоритм, формирующий левый сингулярный вектор U, правый сингулярный вектор V и сингулярные числа S, и размещает их в соответствующих массивах.
Микропроцессор выполняет программу до прихода момента времени d (фиг. k). В этот момент четвертый счетчик начинает счет импульсов третьего генератора 35, проходящих через открытый второй ключ 3. Выходы четвертого счетчика 29 через первый мультиплексор 2 поступают на адресные входы массива 25 данных. апи- санные в него результаты измерений считываются и умножаются на соответствующее значение левого сингулярного вектора U, считываемого из массива 27 U, во втором умножителе 26. Результаты перемножения накапливаются в первом накопителе 37 (фиг. s) до тех пор, пока цифровой код в четвертом счетчике 29 не сравняется с кодом третьего счетчика 23, содержа- щим число отсчетов. Коды из этих счетчиков поступают на компаратор 33 который при их совпадении вырабатывает импульс совпадения (фиг. г). По фронту этого импульса (фиг,, момент времени е ) данные в первом накопителе 37 делятся в делителе k на значение соответствующего сингулярного числа из массива 28 S, умножаются в третьем умножителе k2 на соответствующее значение правого сингулярного вектора V из массива kS V и заносятся во второй накопитель 38, По заднему фронту импульса (фиг. kt момент времени f ) первый накопитель устанавливается в начальное положе- ние 37 переключается пятый счетчик }0, изменяя адрес значений левого сингулярного вектора 27 U, сингулярного числа 28 S и правого сингулярного вектора 5 V и устанавли- вая в начальное состояние четвертый счетчик 29 и первый накопитель 37.
Так как устройство реализует разделение значений для двух нагрузок, то и число состояний пятого 30 и шестого 31 счетчиков равно двум. Поэтому после второго импульса совпадения компаратора 33 по спаду выходного импульса пятого счетчика 30 (момент времени h ) первый одновибратор 36 вырабатывает импульс и записывает данные из второго накопителя 38 в массив 0 результата. По спаду импульса первого одновибратора 36 устанавливается в начальное состояние второй накопитель 38 и изменяется состояние шестого счетчика 31, который изменяет адресацию столбцов массива kS V и массива tO результатов Р (момент времени i/). Еще через два цикла четвертого счетчика 29 (момент времени п ) по спаду выходного импульса шестого счетчика 31 второй одновибратор 50 вырабатывает импульс, по спаду которого закрывается второй ключ 3 (момент времени о ) и устана в- .ливается сигнал 51 Готовность, который сигнализирует о том, что в массиве kO результатов Р находятся изме5 ряемые значения нагрузок. На этом заканчивается цикл работы устройства до прихода новых импульсов с датчиков пути от новой пары нагрузок, которые инициализируют устройство для нового
Q цикла измерений.
Формула изобретения
5
.Способ взвешивания движущихся объектов, заключающийся в том, что объект перемещают по измерительному участку, по сигналу путевого датчика сигналы весовых датчиков оцифровывают и запоминают, производят цифровую фильтрацию-интегрированием с использованием весовой функции, о т- личающийся тем, что, с целью повышения точности, сигналы всех весовых датчиков перед оцифровыванием фильтруют, после оцифровывания умножают на заданные коэффициенты, суммируют сигналы датчиков от одновременно воспринимаемых нагрузок, измеряют временные интервалы между нагрузками, определяют по
ним и длинам измерительных участков число нагрузок, приходящихся на два ближайших измерительных участка, и число одновременно воспринимаемых нагрузок, измеряют скорость движения объекта, а веса нагрузок вычисляют по измеренным величинам.
(2) (2) (3) (i) (5) (1} (5) (1) (5) tf)
и М
(W3)




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1990 |
|
SU1789877A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1800269A1 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| НЕЙРОПРОЦЕССОР | 2011 |
|
RU2473126C1 |
| ТЕПЛОВИЗОР НА ОСНОВЕ "СМОТРЯЩЕЙ" МАТРИЦЫ ФОРМАТА 256Х256 | 2011 |
|
RU2454022C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| Устройство для ввода информации | 1983 |
|
SU1145336A1 |
| СИСТЕМА АСТРОНАВИГАЦИИ | 2013 |
|
RU2548927C1 |


Изобретение относится к весоизмерительной технике и позволяет повысить точность измерения. По сигналу путевого датчика сигналы весовых датчиков оцифровывают и запоминают, производят цифровую фильтрацию интегрированием с использованием весовой функции. ,При этом сигналы весовых датчиков перед оцифровыванием фильтруют, а после оцифровывания умножают на заданные коэффициенты. Суммируют сигналы датчиков от одновременно воспринимаемых нагрузок, измеряют временные интервалы между нагрузками, определяют по ним и длинам измерительных участков исло нагрузок, приходящихся на два ближайших, измерительных участка, и число одновременно воспринимаемых нагрузок, измеряют скорость движения объекта, а веса нагрузок вычисляют по измеренным величинам. 5 ил.
Фиг.
ej
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Приборы и системы управления | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ( СПОСОБ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | |||
