та гидравлический тормоз 16 поворота передает энергию гидравлическому тормозу 19, который вместе с пневмоцилимдром 7 выдвигает руку. В конце выдвижения тормоз 16 вытесняет жидкость в тормоз 12
подъема, который вместе с пневмоцилинд- ром 2 опускает руку. Гидравлический тормоз 13 опускания руки преобразует кинетическую энергию опускания руки в тепло. 1 ил.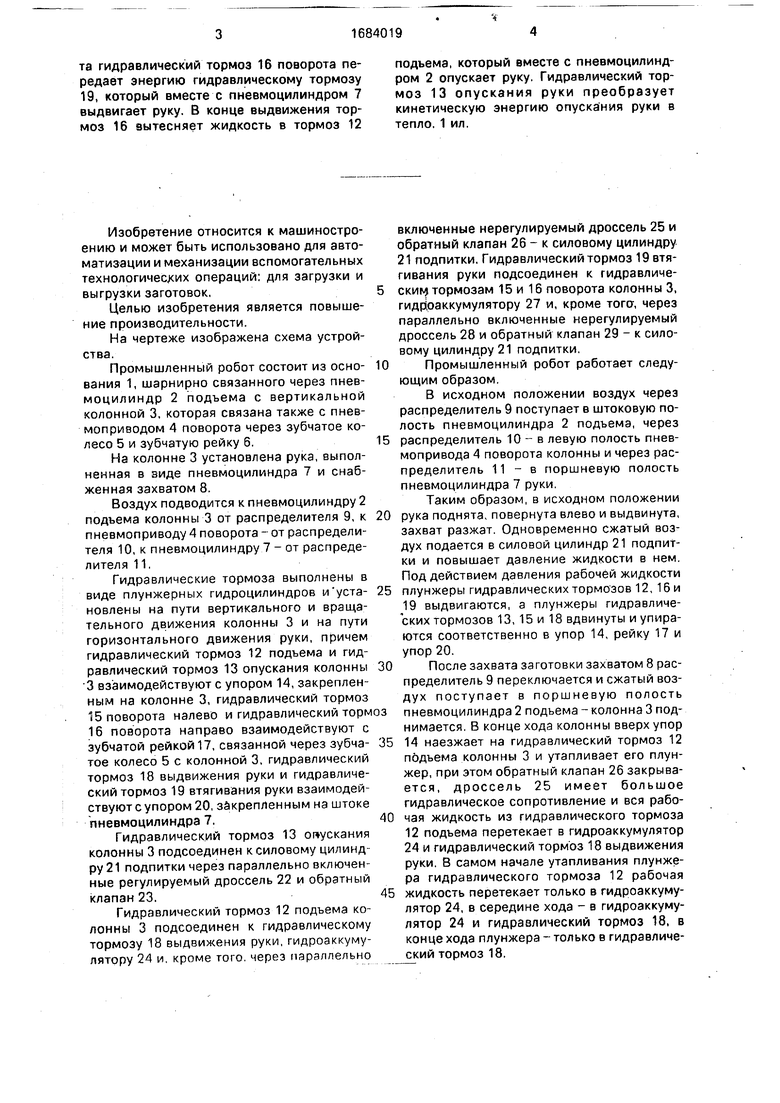
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1980 |
|
SU931462A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| ГИДРОПРИВОДНАЯ УСТАНОВКА ШТАНГОВОГО ПОГРУЖНОГО НАСОСА | 1993 |
|
RU2072451C1 |
| ГИДРАВЛИЧЕСКАЯ ВЫДВИЖНАЯ ОПОРА ТРАНСПОРТАБЕЛЬНОГО МОДУЛЯ-КОНТЕЙНЕРА | 2002 |
|
RU2205149C1 |
| Механизм поворота колонны стрелового манипулятора | 2015 |
|
RU2610848C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
Изобретение относится к машиностроению и может быть использовано для автоматизации и механизации вспомогательных технологических операций. Целью изобре48 20 I i тения является повышение производительности. В конце подъема колонны срабатывает конечный выключатель, переключающий распределитель 11 на подачу воздуха в што- ковую полость пневмоцилиндра 7, а упор 14 наезжает на тормоз 12 и вытесняет из него рабочую жидкость в гидроаккумулятор 24 и тормоз 18 выдвижения руки, который действует в ту же сторону, что и давление в што- ковой полости. В конце втягивания руки гидравлический тормоз 19 втягивания руки вытесняет рабочую жидкость в гидравлический тормоз 15. который вместе с пневмоприводом 4 поворачивает колонну 3 и закрепленную на ней руку. В конце повороО 00 I N0 23
Изобретение относится к машиностроению и может быть использовано для автоматизации и механизации вспомогательных технологических операций: для загрузки и выгрузки заготовок,
Целью изобретения является повышение производительности.
На чертеже изображена схема устройства.
Промышленный робот состоит из осно- вания 1, шарнирно связанного через пнев- моцилиндр 2 подъема с вертикальной колонной 3, которая связана также с пневмоприводом 4 поворота через зубчатое колесо 5 и зубчатую рейку 6.
На колонне 3 установлена рука, выполненная в виде пневмоцилиндра 7 и снабженная захватом 8.
Воздух подводится к пневмоцилиндру 2 подъема колонны 3 от распределителя 9, к пневмоприводу 4 поворота - от распределителя 10, к пневмоцилиндру 7 - от распределителя 11.
Гидравлические тормоза выполнены в виде плунжерных гидроцилиндров и уста- новлены на пути вертикального и вращательного движения колонны 3 и на пути горизонтального движения руки, причем гидравлический тормоз 12 подъема и гидравлический тормоз 13 опускания колонны 3 взаимодействуют с упором 14, закрепленным на колонне 3, гидравлический тормоз
15поворота налево и гидравлический торм
16поворота направо взаимодействуют с зубчатой рейкой 17, связанной через зубча- тое колесо 5 с колонной 3, гидравлический тормоз 18 выдвижения руки и гидравлический тормоз 19 втягивания руки взаимодей- ствуютсупором 20, закрепленным на штоке пневмоцилиндра 7.
Гидравлический тормоз 13 опускания колонны 3 подсоединен к силовому цилиндру 21 подпитки через параллельно включенные регулируемый дроссель 22 и обратный клапан 23.
Гидравлический тормоз 12 подъема колонны 3 подсоединен к гидравлическому тормозу 18 выдвижения руки, гидроаккумулятору 24 и, кроме того, через параллельно
включенные нерегулируемый дроссель 25 и обратный клапан 26 - к силовому цилиндру 21 подпитки. Гидравлический тормоз 19 втягивания руки подсоединен к гидравлическим тормозам 15 и 16 поворота колонны 3, гидрюаккумулятору 27 и, кроме тога, через параллельно включенные нерегулируемый дроссель 28 и обратный клапан 29 - к силовому цилиндру 21 подпитки.
Промышленный робот работает следующим образом.
В исходном положении воздух через распределитель 9 поступает в штоковую полость пневмоцилиндра 2 подъема, через распределитель 10 - в левую полость пневмопривода 4 поворота колонны и через распределитель 11 - в поршневую полость пневмоцилиндра 7 руки.
Таким образом, в исходном положении рука поднята, повернута влево и выдвинута, захват разжат. Одновременно сжатый воздух подается в силовой цилиндр 21 подпитки и повышает давление жидкости в нем. Под действием давления рабочей жидкости плунжеры гидравлических тормозов 12, 16 и 19 выдвигаются, а плунжеры гидравлических тормозов 13, 15 и 18 вдвинуты и упираются соответственно в упор 14, рейку 17 и упор 20.
После захвата заготовки захватом 8 распределитель 9 переключается и сжатый воздух поступает в поршневую полость пневмоцилиндра 2 подъема - колонна 3 поднимается. В конце хода колонны вверх упор 14 наезжает на гидравлический тормоз 12 подъема колонны 3 и утапливает его плунжер, при этом обратный клапан 26 закрывается, дроссель 25 имеет большое гидравлическое сопротивление и вся рабочая жидкость из гидравлического тормоза 12 подъема перетекает в гидроаккумулятор 24 и гидравлический тормоз 18 выдвижения руки. В самом начале утапливания плунжера гидравлического тормоза 12 рабочая жидкость перетекает только в гидроаккумулятор 24, в середине хода - в гидроаккумулятор 24 и гидравлический тормоз 18, в конце хода плунжера - только в гидравлический тормоз 18.
В момент соприкосновения упора 14 и плунжера гидравлического тормоза 12 срабатывает концевой переключатель (не показан), который переключает распределитель 11, сжатый воздух подается в штоковую полость пневмоцилиндра 7 руки и рука начинает втягиваться под действием давления воздуха в пневмоцилиндре 7 и под действием давления рабочей жидкости, перетекающей из гидравлического тормоза 12 подъема и гидроаккумулятора 24 в гидравлический тормоз 18 выдвижения руки. При дальнейшем втягивании руки плунжер гидравлического тормоза 18 выдвигается полностью, и рука продолжает движение под действием сил инерции и под действием давления воздуха в штоковой полости пневмоцилиндра 7.
Таким образом, всю кинетическую энергию движения колонны 3 и руки вверх (за исключением потерь на трение) гидравлический тормоз 12 подьема колонны 3 передает в гидравлический тормоз 18 выдвижения руки, который полученную энергию рабочей жидкости превратил в кинетическую энергию втягивания руки. Гидроаккумулятор служит для ограничения отрицательного ускорения при торможении подъема колонны 3 и для ограничения ускорения руки при ее втягивании. Если площади плунжеров пропорциональны корням квадратным от тормозных масс, а рабочие ходы плунжеров обратно пропорциональны площадям плунжеров, то система обладает свойством саморегулировки., которое заключается в том, что величина отрицательного ускорения при торможении подъема оптимальна вне зависимости от скорости в момент соударения. В то же время, когда гидравлический тормоз работает в качестве ускорителя, величина ускорения при разгоне руки также оптимальна вне зависимости от скорости, до которой разгоняется рука.
Дальнейшие движения робота принципиально ничем не отличаются от указанного. Так, в конце втягивания руки гидравлический тормоз 19 втягивания руки передает кинетическую энергию руки гидравлическому тормозу 15 поворота, который вместе с пневмоприводом 4 поворачивает колонну 3 и закрепленную на ни руку направо.
В конце поворота направо гидравлический тормоз 16 поворота направо передает энергию гидравлическому тормозу 19 втягит вания руки, который вместе с пневмоцилин- дром 7 выдвигает руку. В конце выдвижения гидравлический тормоз 16 передает энергию гидравлическому тормозу 12 подьема, который вместе с пневмоцилиндром 2 опускает руку.
И лишь гидравлический тормоз 13 опускания руки превращает кинетическую энергию опускания руки в тепло.
Так совершается первая половина цикла: взятие заготовка - подъем - втягивание руки - поворот направо - выдвижение руки - опускание - отпускзние заготовки.
Аналогично совершается вторая половина цикла: подъем - втягивание руки - поворот налево - выдвижение руки - опускание. Отличие состоит в том, что после втягивания руки поворот колонны 3 совершается не направо, как в первой половине цмкла, а налево. Это достигается тем, что
колонна 3 после поворота направо взаимодействует с гидравлическим тормозом 16 поворота направо, который после повышения давления в нем вместе с пневмоприводом 4 поворачивает руку налево.
После совершения второй половины цикла робот останавливается в положении, которое является исходным для начала нового цикла.
В результате такого выполнения гидросистемы значительно увеличивается быстродействие робота за счет совмещения большинства движений.
При этом не требуется повышать давление в пневмосистеме, увеличивать массы
подвижных частей робота, пневмоцилинд- ров и пневмоаппаратуры.
Формула изобретения Промышленный робот, содержащий
подъемно-поворотную колонну, установленную на основании и несущую механическую руку, выполненную в виде силового пневмоцилиндра. на штоке которого через промежуточный элемент установлен захват,
а также систему управления, коммуникации для подвода сжатого воздуха и гидравлические тормоза, выполненные в виде плунжерных гидроцилиндров, подсоединенные через параллельно включенные обратные
клапаны и дроссели к дополнительному силовому цилиндру подпитки, и гидроаккумуляторы, отличающийся тем, что, с целью повышения производительности, гидравлический тормоз выдвижения руки
соединен с гидравлическим тормозом подъема колонны, с одним из гидроаккумуляторов и через параллельно включенные обратный клапан и дроссель - с дополнительным силовым цилиндром подпитки, а
гидравлический тормоз втягивания руки соединен с гидравлическими тормозами поворота колонны, с другим гидроаккумулятором и через параллельно включенные обратный клапан и дроссель - с дополнительным силовым цилиндром подпитки.
| Промышленный робот | 1980 |
|
SU931462A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
