1
Изобретение относится к машиностроению, в частности к промышленным роботам.
Известно устройство для позиционирования руки промышленного робота, содержащее дроссельные устройства, приводимые в действие сигналом о начале торможения 1 .
Однако известное устройство не обладает достаточной точностью позиционирования, имеет плохие динамические характеристики при торможении, так как не обеспечивает равномерного торможения при подходе к промежуточной точке.
Цепь изобретения - повышение точности позиционирования и снижение динамических нагрузок промышленного робота.
Это достигается тем, что устройство для позиционирования .руки промыш лейного робота снабжено золотником, имеющим плунжер с конической иглой, установленным на золотнике пальцем.
подпружиненным относительно планки золотника, и упором, выполненным регулируемым. Использование плунжера с конической иглой и поворотного золотника дает возможность изменять дросселирующее отверстие, что позволяет получить плавный закон торможения, а использование упора позволяет установить оптимальный закон торможения.
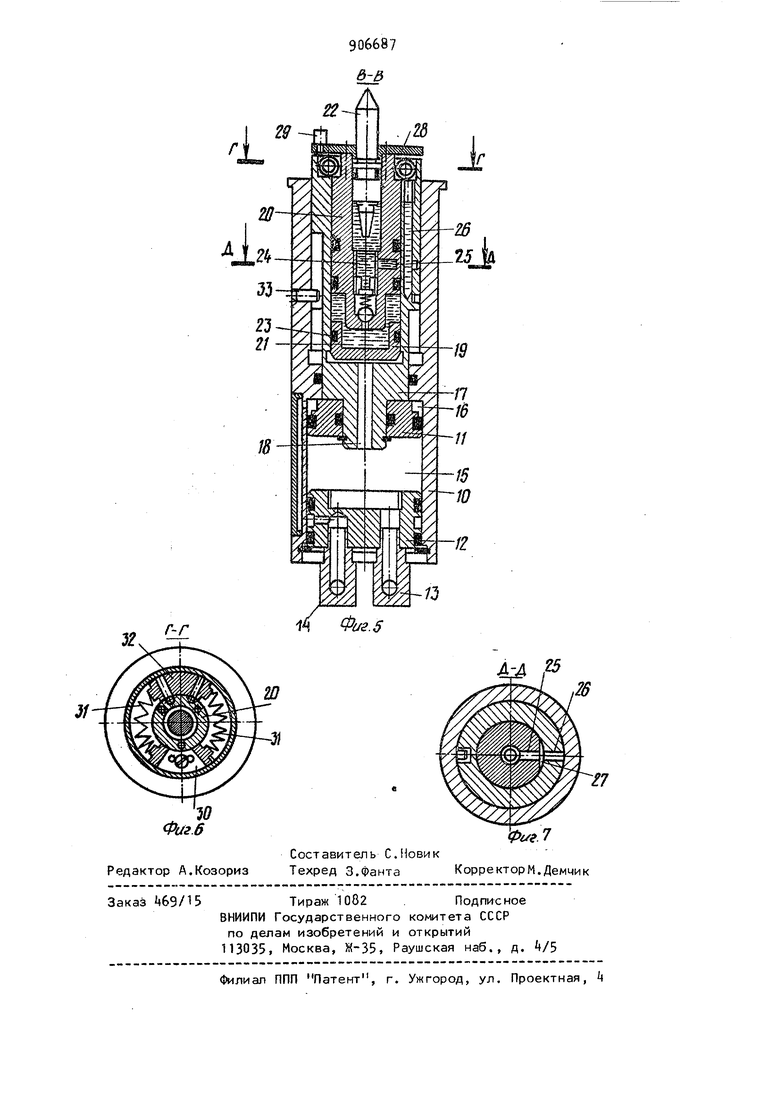
На фиг. 1 изображено устройство для позиционирования руки промышленного робота, на фиг. 2 - регулируемый упор, вид Л на фиг. 1; на фиг.З то же, но при подходе регулируемого упора к пальцу золотника; на фиг. Ц - вид Б на фиг.З, на фиг.5 - пневмоцилиндр, сечение В-В на фиг.2, на фиг.6 - сечение Г-Г на фиг.5 на фиг. 7 - сечение Д-Д на фиг.5.
Устройство для позиционирования руки промышленного робота 1 состоит из пневмоцилиндра 2, датчика положения 3, которые устанавливаются на
неподвижном основании «, и упора 5 устанааливаемого на вращающемся основнии руки 6, на котором установлен зубчатый вал 7.На неподвижном основании k установле н реечный привод поворота 8, на упоре 5 - упор 9.
Пневмоцилиндр 2 состоит из гильзы 10, поршня It, дна 1.2, в котором установлены штуцера 13 и Н. Пневмоцилиндр имеет полости 15 и 16, разделенные поршнем 11, который соединен со штоком 17, в котором выполнен отверстие 18. Внутри штока 17 установлен поршень 19 и золотник поворотного дросселя 20. Между поршнем 19 и золотником 20 находится заполненная маслом полость 21. Внутри золотника 20 установлен плунжер 22 с конической иглой и обратный клапан 23, между которыми заключена заполненная маслом полость 2. Полость 2k сообщается с полостью 21 через отверстие 25, выполненное в золотнике 20, и отверстие 26, выполненное в штоке 17. Отверстие 25 входит в дроссельную лыску 27, выполненную на золотнике 20, Плунжер 22 удерживается в золотнике 20 крышкой 28, на которой установлен палец 29. Золотник 20 удерживается в штоке планкой 30 , являющейся элементом корпуса золотника, в которую одними своими торцами упираются пружины 31, а другими торцами в планку 32, установленную на золотнике 20. Шток 17 удерживается от проворота установленным в гильзе 10 штифтом 33. В упоре 5 выполнено фиксирующее коническое гнездо 3.
Устройство для позиционирования руки промышленного робота работает следуимцим образом. Сжатый воздух подается через штуцер 13 в полдсть 15 пневмоцилиндра 2 и поднимает поршень 11 и шток 17 в крайнее верхнее положение. Одновременно сжатый воздух из полости 15 через отверстие 18 подается под поршень 19, который сжимает и вытесняет масло из полости 21 через обратный клапан 23 и отверстия 26 и 25 в полость 2. Давлением масла плунжер 22 поднимается в верхнее положение, удерживаясь крышкой 28. От привода поворота 8
через зубчатый вал 7 приводится во вращение основание руки 6, на котором закреплен передвигаемый в зависимости от нужного угла поворота руки упор 5, имепдий двусторонние скосы. При вращении руки упор 5 своим скосом подходит к плунжеру и начинает давить на него. Плунжер 22 опускается вниз и вытесняет масло из полости 2, при этом его коническая игла изменяет площадь сечения дросселирующего отверстия, плавно гася скорость вращения руки. Масло из полости 2А вытесняется в полость 21 через отверстия 26 и 25. При дальнейшем повороте упора 5 установленный н нем упор 9 входит в соприкосновение с пальцем 29 и поворачивает золотник 20. Лыска 27 на золотнике 20 начинает смещаться относительно отверстия 25 в стенке штока 17 плавно изменяя площадь сечения дросселирующего отверстия. Происходит добавочное снижение скороти и при дальнейшем повороте упора 5 Плунжер 22 своим коническим концом заскакивает в коническое фиксирующее гнездо 3. Рука останавливается в заданной точке, что и фиксирует конечный «включатель - датчик положения 3. Передвигая упор 9 влево или вправо относительно упора 5 можно регулировать начало торможения дросселем поворотного типа. Это нужно, если промежуточная точка находится ассиметрично относительно крайних положеьий, из которых слева или справа подходит к промежуточной точке упор 5 с различной кинетической энергией. При подаче команды на К.1ХОД руки из промежуточной токи сжатый воздух через штуцер I подается в полость 16. При этом поршень 11 и шток 17 опускаются в крайнее нижнее положение. Плунжер 22 выходит из конического гнезда 3+ и освобождает упор 5. Рука совершает дальнейший поворот. При опускании штока 17 палец 29 соскальзывает с упора 9 и пружины 31, действуя на планку 32, связанную с золотником 20, поворачивают его в исходное положение, увеличивая тем самым площадь сечения дросселирующего отверстия .
Применяемое устройство для позиционирования руки промышленного робота позволяет плавно затормозить и зафиксировать руку в выбранной точке. Устройство допускает получат оптимальный закон торможений при повороте руки с разных углов. Применение устройства возможно ка при вращении руки, так и при ее прямолинейном движении. При соответствующей конструкции системы управления и манипулятора одно устройств может обеспечить множество промежуточных точек, количество которых будет обусловлено скоростью срабатывания устройства и размерами подвижных упоров, а также расстояниями меж ду ними и скоростью исполнительного движения. формула изобретения Устройство для позиционирования руки промышленного робота, содержа976 щее упор, датчик положения и силовой цилиндр о т ли мающееся тем, что, с целью повышения точности позиционирова мя- и снижения динамических нагрузок, оно снабжено расположенным в штоке силового цилиндра золотником, имеющим плунжер с конической иглой и палец, подпружиненный относительно корпуса золотника, причем упор выполнен регулируемым и связан с плунжером. Источники информации; принятые во внимание при экспертизе 1. Авторское свидетельство СССР V 503712, кл. В 15 J 9/00, 1976.
. .8
Фиг.2
Вид 6
ФигЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1974 |
|
SU503712A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1986 |
|
SU1360978A1 |
| Гидродемпфер | 1983 |
|
SU1153142A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Гидравлический демпфер | 1978 |
|
SU739279A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| ГИДРАВЛИЧЕСКОЕ ДЕМПФИРУЮЩЕЕ УСТРОЙСТВО ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2011 |
|
RU2467224C1 |