Изобретение относится к области пневмоавтоматики и может быть использовано в приводах технологического оборудования и промышленных роботов.
Известен пневматический позиционный привод (Патент РФ №2041405, бюллетень 24/2000, опубликовано 09.08.1995), содержащий силовой пневмоцилиндр, установленный на основании, два тормозных устройства фрикционного типа для взаимодействия с линейками тормозных устройств, соединенными со штоком пневмоцилиндра, микроЭВМ, подключенную к двухпозиционным электромагнитным клапанам, связанных с полостями тормозных устройств и полостями пневмоцилиндра, а также датчик обратной связи и пассивный тормозной гидроцилиндр, полости которого соединены между собой через дроссель, а поршень подпружинен с двух сторон пружинами, размещенными в его полостях, при этом шток указанного гидроцилиндра размещен между одним из тормозных устройств и соответствующей линейкой, снабженной роликами качения, оси которых неподвижно закреплены на основании, а корпус гидроцилиндра снабжен роликовыми опорами и установлен с возможностью поперечного перемещения в направлении сжимающего усилия от фрикционного тормозного устройства.
Недостатком вышеупомянутого привода являются механические фрикционные связи, приводящие к износу трущихся поверхностей и снижению точности позиционирования вследствие изменения сил трения.
Известен также гидропривод исполнительного органа металлорежущего станка, (Авторское свидетельство СССР №307207, опубликовано 21.06.1971, бюллетень №20), выбранный в качестве прототипа, образованный силовым цилиндром с распределительным золотником, питаемым от насоса через дроссель с регулятором, и имеющий обратную связь через передачу винт-гайка на гидроуправляемый золотник с подводом управляющего давления под торец плунжера, предназначенного для остановки гидроцилиндра.
Недостатком этого привода является низкое быстродействие, обусловленное высокой вязкостью рабочих жидкостей гидроприводов.
Изобретение создано с целью увеличения быстродействия и повышения точности позиционирования исполнительного механизма.
Техническая задача достигается тем, что в приводе, включающем двигатель с исполнительным механизмом, регулятор потока, шарико-винтовую передачу, взаимодействующую по типу обратной связи с вращающимся распределителем, применен пневматический двигатель с пневмораспределителем и жестко связанный с ним гидравлический тормоз, управляемый гидросистемой, оснащенной гидрораспределителем, гидроаккумулятором и регулятором потока, установленным на слив, а вращающийся распределитель снабжен пневмораспределителем.
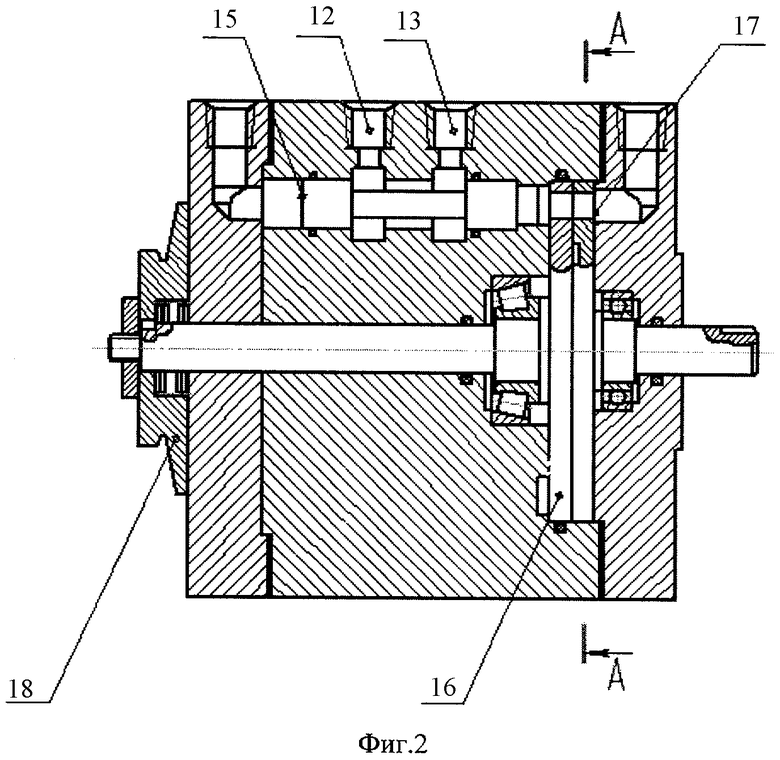
На Фиг.1 изображена схема пневматического позиционного привода. На Фиг.2 приведена схема вращающегося распределителя. На Фиг.3 - разрез по ведомому диску.
Привод состоит из пневматического двигателя 1, жестко связанного с гидравлическим тормозом 2 и управляемого пневмораспределителем 3, управляющим в свою очередь направлением перемещения исполнительного механизма 4, и гидросистемы, с гидрораспределителем 5, обратным клапаном 6, регулятором потока 7, счетчиком оборотов 8, гидроаккумулятором 9, шарико-винтовой передачей 10, вращающимся распределителем 11 с каналами 12, 13 и пневмораспределителем 14. В состав вращающегося распределителя 11 входит установочный диск 16 и ведомый диск 17. Лимб 18 кинематически связан с установочным диском 16 вращающегося распределителя 11.
Работа привода происходит следующим образом.
При подаче электрического сигнала на левый электромагнит пневмораспределителя 3 поток сжатого воздуха поступает в поршневую полость пневмодвигателя 1 под магистральным давлением, а из штоковой полости вытесняется в атмосферу. При этом поршни цилиндров пневмодвигателя 1 и гидравлического тормоза 2 вместе с исполнительным механизмом 4 быстро перемещаются вправо. Поскольку одновременно включен электромагнит гидрораспределителя 5, рабочая жидкость с малым сопротивлением перетекает через обратный клапан 6 из правой полости гидравлического тормоза 2 в левую - происходит разгон исполнительного механизма 4.
Информация о перемещении поступает от счетчика оборотов 8, кинематически связанного через шарико-винтовую передачу 10 с исполнительным механизмом 4.
При подходе исполнительного механизма 4 к заданной координате счетчик оборотов 8 подает сигнал на отключение электромагнита гидрораспределителя 5, и рабочая жидкость начинает перетекать через каналы 12 и 13 вращающегося распределителя 11 и регулятор потока 7 из правой полости гидравлического тормоза 2 в левую - происходит снижение скорости перемещения исполнительного механизма 4 до стабилизированной к нагрузочным характеристикам «ползущей». За один оборот до заданной координаты позиционирования счетчик оборотов 8 подает сигнал на включение электромагнита пневмораспределителя 14, и поток сжатого воздуха поступает от пневмомагистрали к правому торцу ведомого диска 17 вращающегося распределителя 11, кинематически связанного через шарико-винтовую передачу 10 с исполнительным механизмом 4. И при совмещении щелей установочного диска 16 и ведомого диска 17 поток сжатого воздуха проходит к правому торцу установочного диска 16 вращающегося распределителя 11 и перемещает его, тем самым перекрывая поток рабочей жидкости, - происходит останов исполнительного механизма 4. Очередной позиционный цикл происходит аналогично. Координата позиционирования задается вращением лимба 18, кинематически связанного с установочным диском 16 вращающегося распределителя 11.
Благодаря введению пневмопривода, обеспечивающего высокие скорости движения выходных звеньев, повышается быстродействие привода за счет больших скоростей течения газов в магистралях.
Использование гидротормоза позволяет повысить точность останова исполнительного механизма за счет малой сжимаемости рабочей жидкости.
Использованием гидросистемы, управляющей гидротормозом, удается обеспечить изменение структуры гидропривода на участках разгона, замедления и торможения, что повышает быстродействие привода и точность останова исполнительного механизма.
Использование пневматического сигнала, обладающего высоким быстродействием за счет малой вязкости газов, позволяет уменьшить время и разброс времени срабатывания вращающегося распределителя, что повышает точность остановки исполнительного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Гидравлический позиционный привод | 1981 |
|
SU989175A1 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1557369A1 |
| Гидравлический позиционный привод | 1986 |
|
SU1418512A1 |
| Гидросистема дорожной машины с распределителем рабочего оборудования | 1989 |
|
SU1740219A1 |
| Гидравлическая позиционная система программного управления | 1973 |
|
SU479889A2 |
| ГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2458261C2 |
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| Гидрообъемная трансмиссия для многоприводного транспортного средства | 2018 |
|
RU2692298C1 |
Привод предназначен для технологического оборудования и промышленных роботов. В приводе, включающем двигатель с исполнительным механизмом, регулятор потока, шарико-винтовую передачу, взаимодействующую по типу обратной связи с вращающимся распределителем, применен пневматический двигатель с пневмораспределителем и жестко связанный с ним гидравлический тормоз, управляемый гидросистемой, оснащенной гидрораспределителем, гидроаккумулятором и регулятором потока, установленным на слив, а вращающийся распределитель снабжен пневмораспределителем. Технический результат - увеличение быстродействия привода и повышение точности позиционирования исполнительного механизма. 3 ил.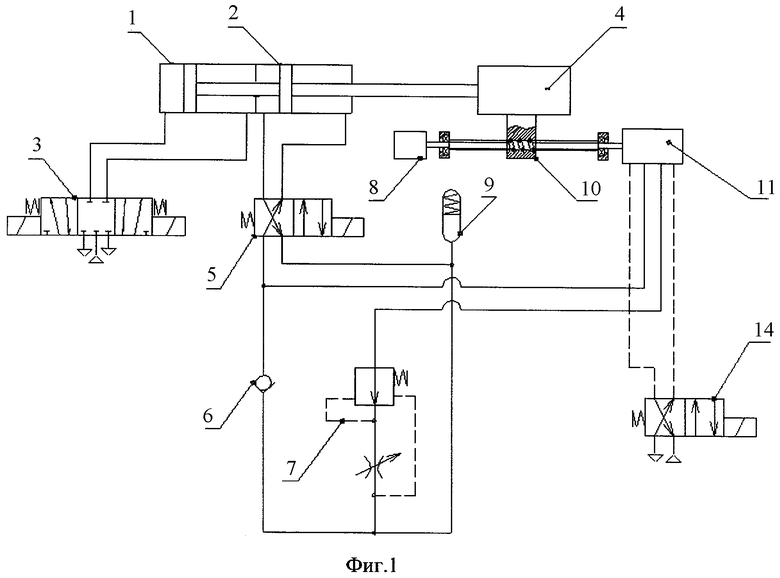
Пневматический позиционный привод, включающий двигатель с исполнительным механизмом, регулятор потока, шарико-винтовую передачу, взаимодействующую по типу обратной связи с вращающимся распределителем, отличающийся тем, что в приводе применены пневматический двигатель с пневмораспределителем и жестко связанный с ним гидравлический тормоз, управляемый гидросистемой, оснащенной гидрораспределителем, гидроаккумулятором и регулятором потока, установленным на слив, а вращающийся распределитель снабжен пневмораспределителем.
| ГИДРОПРИВОД ИСПОЛНИТЕЛЬНОГО ОРГАНА ]_ МЕТАЛЛОРЕЖУЩЕГО СТАНКА^•-•^=;г: | 0 |
|
SU307207A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 1992 |
|
RU2041405C1 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2007 |
|
RU2350791C1 |
| DE 3436679 A1, 10.04.1986 | |||
| DE 3631844 A1, 02.04.1987. | |||

