Изобретение относится к подъемно- транспортным устройствам, а именно к использованию устройств, обеспечивающих надежность и безопасность эксплуатации системы сосуд-армировка и может быть использовано в горнорудной промышленности.
Цель изобретения - повышение точности контроля за счет непрерывного учета зазоров между проводником и сосудом.
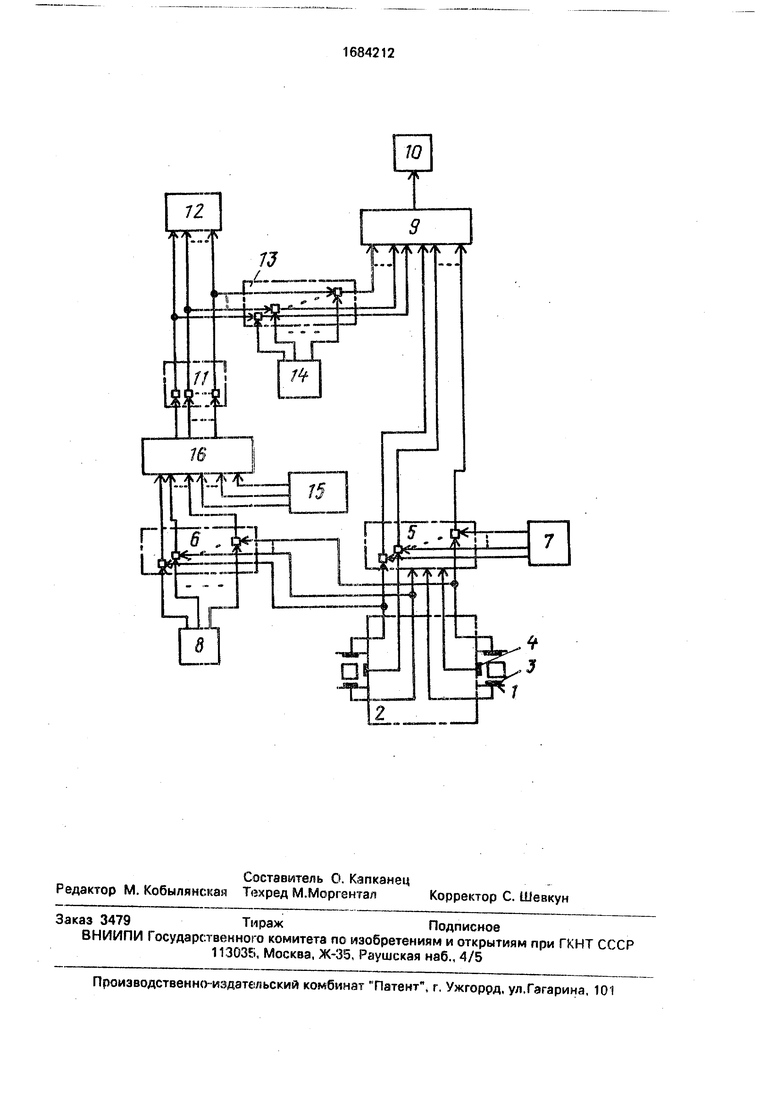
На чертеже изображен пример осуществления способа контроля движения сосуда шахтной подъемной установки.
В направляющих башмаках 1 подъемного сосуда 2 установлены датчики 3 и 4 для
измерения отклонения направляющих, т.е. боковых и лобовых зазоров соответственно. Датчики 3 и 4 соединены с первым входом элементов 5 и 6 сравнения. На второй вход указанных блоков подается электрический сигнал от задатчика 7 допустимой величины зазоров и задатчика 8 установочной величины зазоров соответственно. С выхода элемента 5 сигналы поступают на вход логического элемента ИЛИ 9, выход которого связан с исполнительным органом 10 (например тормозом подъемной машины). Выходы счетчика 11 соединены с входами регистрирующего устройства 12 (или блока памяти) и первыми входами блока 13 сраво
00
ю
КЗ
нения. На второй вход указанного блока подается сигнал от задатчика 14 числа допустимых отклонений. Выходной сигнал блока
13поступает на элемент ИЛИ 9. Выходы датчика 15 местоположения сосуда соединены с управляющими входами демультип- лексора 16, информационные входы которого соединены с выходами элемента 6, а выходы - с входами счетчика 11. Датчики 3 и 4 взаимодействуют с проводниками в стволе шахты.
Способ контроля движения сосуда шахтной подъемной установки осуществляют следующим образом.
Устанавливают уровень сигнала, поступающего от задатчика 7 допустимой величины зазоров на второй вход элемента 5. При этом уровень указанного сигнала должен соответствовать зазору между направляющим башмаком 1 и проводником, равному
14мм. Аналогично производят установку минимального уровня, для нашего примера 2 мм. Далее устанавливают уровень электрического сигнала, поступающего от задатчика 8 установочной величины зазоров. На основании статистической обработки маркшейдерских данных о профиле проводников этот уровень должен соответствовать величине зазора между направляющим башмаком 1 и проводником, равного 90% от величины допустимого зазора, для нашего примера величине установочного зазора 12,6 мм. Показания счетчика 11 устанавливают на 0 (не показано). Устанавливают уровень сигнала, поступающего от задатчика 14 числа допустимых отклонений на блок 13. Учитывая, что подьем является ответственным участком в работе шахты, принимают количество отклонений зазоров от величины установочного зазора равным 10. Т.е. при отклонениях величины зазора от установочного в большую сторону в одном и том же месте по глубине стола (десять раз) происходит срабатывание защитной системы.
Работа системы осуществляется непосредственно в условиях эксплуатации подъемной установки на рабочей скорости движения подъемного сосуда. При движении подъемного сосуда 2 зазор между направляющими башмаками 1 и проводниками меняется соответственно пропорционально этому меняются и электрические сигналы, поступающие от датчиков 3 и 4 на первый вход элемента 5 сравнения, где указанные сигналы сравниваются с сигналом, поступающим на второй вход элемента 5 от задатчика 7 допустимых зазоров. Если сигналы от датчиков 4 и 3 не превышают уровня сигналов задатчика 7, то защита не срабатывает, так как на элемент ИЛИ 9 поступают с элемента 5 сравнения сигналы только нулевого уровня. При превышении хотя бы одного из сигналов от датчиков 3 и 4 уровня сигналов задатчика 7 этот единичный сигнал с выхода
элемента 5 сравнения поступает на элемент ИЛИ 9 и на исполнительный орган 10, например тормоз подьемной машины. Производят остановку подъемного сосуда. Аналогично работает система и для мини0 мально допустимого зазора.
Кроме того, сигналы поступающие от датчиков 3 и 4, поступают на первый вход элемента 6 сравнения, где происходит.срав- нение этих сигналов с соответствующими
5 сигналами, поступающими на второй вход элемента 6 сравнения от задатчика 8 установочной величины зззоров, и определяют уровень отклонения сигналов датчиков 3 и 4 от сигналов задатчика 8. Выходы элемента
0 6 сравнения подключают с помощью де- мультиплексора 16 с тактовым (счетным) входам счетчика 11, соответствующим определенному местоположению подъемного сосуда. Для этого датчиком 15 измеряют
5 местоположения подъемного сосуда и соответствующий сигнал в цифровом коде с него подают на управляющие входы демультип- лексора 16. В соответствии с информацией на управляющих выходах демультиплексор
0 осуществляет коммутацию сигналов с выхода элемента 6 сравнения на входы счетчика 11 соответствующего местоположения подъемного сосуда. Таким образом, в счетчике 11 осуществляют подсчет количества
5 отклонений эксплуатационных зазоров от установочного уровня для соответствующего местоположения подъемного сосуда. С выходов счетчика 11 сигналы подают на блок 13 сравнения и на входы регистрирую0 щего устройства 12, С помощью блока 13 производят сравнение указанных сигналов от счетчика 11 с уровнем (кодом) сигналов задатчика 14 числа допустимых отклонений. Если поступающие сигналы (их величина
5 или код) меньше уровня (кода), определяемого сигналами задатчика 14, то на выходе блока 13 формируют сигналы нулевого уровня и защитную систему не включают. Если хотя бы один из поступающих сигналов пре
0 вышает установленный уровень, то соответствующий единичный сигнал с выхода блока 13 поступает на элемент ИЛИ 9 и с него - на исполнительный орган 10. В результате этого, как и в предыдущем случае, производят
5 остановку подъемной машины.
Сигналы, которые поступают на регистрирующее устройство (или блок памяти), записывают, запоминают, затем обрабатывают для получения наглядной информации о состоянии геоме.грических параметров си
стемы сосуд-эрмировка вдоль всей глубины шахтного ствола. Эту информацию используют при составлении планов профилактических осмотров и реминтных работ армировки
Спосгб позволяет контролировать состояние проводников. Зная состояние проводников возможно производить бел- опасный подъем и изменение скорости подъема. Имея достоверные данные о состоянии проводников можно своевременно производить ремонт последних, Использование данного способа позволяет предупредить аварии в шахтном стволе по причине выхода подъемного сосуда из зацепления с проводниками или заклинивания его в местах сужения проводников, производить сво- евременный ремонт армирсвки, дает возможность предотвращения авлрий в шахтном стволе, позволяет достичь р.итмич- ной работы всего шахтного комплекса и повысить его производительность.
Формула изобретения Способ контроля движения сосуда шахтной подъемной установки, заключающийся в непрерывном измерении величины отклонения направляющих в шахте на пути движения сосуда и сравнении с заданной допустимой величиной, отличающийся гем, что, с целью повышения точности кон- трпля, задают число допустимых отклоне0 ний непрерывно измеряют величину местоположения сосуда, задают установочную величину, сравнивают с измеренной величиной отклонения направляющих в шахте Б спучае превышения измеренной
5 величины местоположения сосуда над заданной установочной величиной орпед с учетом местоположения сосула, текущую величину отклонений сосуда, сравнивают с заданным числом допустимых о гклонений и
0 при превышении текущей величины отклонения сосуда от заданной формируют сиг нал на отключение привода шахтной подъемной установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля перемещения подъемного сосуда в стволе шахты | 1988 |
|
SU1616851A1 |
| Способ защиты шахтной подъемной установки от напуска тягового каната | 1989 |
|
SU1745660A1 |
| СТАНЦИЯ ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ПРОВОДНИКОВ ШАХТНОГО СТВОЛА | 1995 |
|
RU2098630C1 |
| Устройство для защиты от превышения скорости шахтной подъемной машины | 1985 |
|
SU1312043A1 |
| СПОСОБ ТОЧНОЙ ОСТАНОВКИ ПОЛА КАБИНЫ ЛИФТА НА УРОВНЕ ПОСАДОЧНОЙ ПЛОЩАДКИ | 2001 |
|
RU2202508C2 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
| Устройство для контроля величины вытяжки каната шахтной подъемной установки | 1983 |
|
SU1189774A1 |
| Способ контроля и устройство для его осуществления | 1987 |
|
SU1528716A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1978 |
|
SU765173A1 |
| Устройство для управления режимами работы шахтного подъемника | 1981 |
|
SU1094827A1 |
Изобретение относится к подъемно- транспортному оборудованию, а именно к использованию устройств, обесяечивающих надежность и безопасность эксплуатации системы сосуд-армировка и предназначено для использования в горнорудной пром-сти. Цель - повышение точности контроля за счет непрерывного учета зазоров между проводниками и сосудом. При контроле движения сосуда непрерывно измеряют величину отклонения направляющих (ОН) в шахте на пути движения сосуда и сравнивают с заданной допустимой величиной и установочной величиной. Дополнительно задают число допустимых ОН и непрерывно измеряют величину местоположения сосуда. Если текущая величина ОН больше допустимой, то формируют сигнал на отключение привода. Если текущая величина ОН больше установочной, то величину ОН далее сравнивают с заданной величиной числа допустимых ОН с учетом местоположения сосуда и определяют текущую величину отклонений сосуда. В случае превышения последней над заданной величиной числа допустимых ОН формируют сигнал на отключение привода подъемной установки 1. ил. (Л С
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ MHOI ОКАБИННОГОПОДЪЕМНИКА | 0 |
|
SU331023A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Патент ФРГ № 3631633, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
