Изобретение касается автоматизации шахтных подъемных машин и может быть использовано для программного регулирования скорости.
Известно цифрювое устройство для программного регулирования скорости подъемной машины, содержащее датчик, вычитающий и реверсивный двоичные счетчики, .подключенные через сравнивающее устройство к блоку управления, который задает закон разгона и замедления движения подъемного сосуда 1 .
. Это устройство не учитывает закона изменения фактической скорости движения подъемного сосуда.
Известна система управления лифтовым подъемником, обслуживающим несколько этажей, в которой задание скорости кабины лифта осуществляется путем воздействия сигналов, вырабатываемых блоком селектора этажа на генератор сигналов скорости, управляющий контроллером двигателя лифта 2. Входы блока селектора этажа связа1&1 с импульсным детектором,, на яход которого поступают сигналы от датчики, вырабатывающего сигналы.
пропорциональные пути движения кабины лифта, и через интерфейс с процессором, вырабатывающим сигналы о заданном пути движения кабины. Селектор этажа сравниваетэти сигналы и в зависимости от разности заданного пути и действительного местоположения кабины формирует сигналы, пропорциональные заданному значению скорости.
Заданная скорость в этой системе формируется в генераторе сигналов скорости, а дейст10вительное значение скорости кабины определяется в отдельных точках при движении перед каждым этажом. Для определения действительной скорости на каждом этаже установлены эталонные рычажные датчики, а на крыше
15 кабины - один общий датчик, который вьщает серию импульсов, частота которых и определяет действительную скорость движения. Эти сигналы через систему передачи поступают в импульсный детектор, выход которого связан
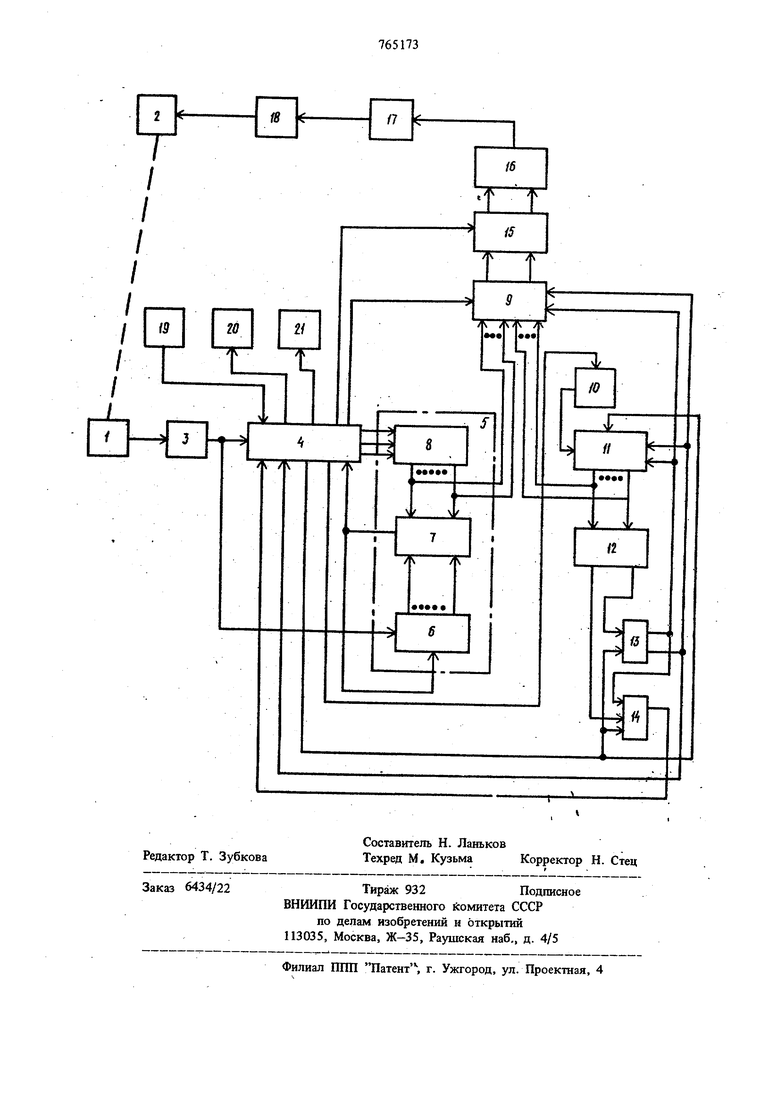
20 с генератором сигналов скорости, в котором происходив сравнение действительной и заданной скоростей. При этом контроль скорости движения осуществляется только п одной из точек пути (перед этажом), что недопустимо для шахтных подъемных машин, требующих непре рывного контроля скорости движения в пределах всего участка пути разгона, равномерно го хода и замедления подъемного сосуда. Кроме того, такой контроль скорости движения связан с необходимостью установки дополнительного ряда этажных датчиков (по числу этажей, обслуживаемых системой), и датчика, установленного на крыше кабины лифта, с системой передачи информации сигна лов скорости в блок ее отработки. Все это, во-перэых, значительно усложняет устройство контроля скорости, и, во-вторых, ограничивает область его применения только для лифтовых подъемников, исключая шахтньг подъемные машины. Из известных устройств наиболее близким техническим решением к изобретению является цифровое устройство для автоматического управления движением шахтной подъемной машины, содержашее датчик путИ; соединенный через формирователь импульсов с блоком управления и блоком масштаба, датчик загрузки сосуда, цепи управления рабочим предохранительным торможением, подключенные к блоку управления, сумматор, вход которого соединен с выходом блока управления, а выходы подключены к блоку оперативной памяти, преобразователь код-аналог, входы которого соединены с выходами блока оперативной памяти, а выход через усилитель мощности подключен к приводу подъемной машины, и генератор эталонной частоты 3. Недостатком известного устройства является низкая точность задания рабочей тахограммы движения подъемного сосуда, в результате чего необходима коррекция программы движения подъемного сосуда в заданной точке пути, где установлен путевой датчик. В результате низкой точности задания тахограммы движения подъемного сосуда невозможно максималь но приблизить рабочую тахограмму к защитной, что снижает производительность подъемно установки. Данное устройство не контролирует критическое рассогласование заданной и действительной скоростей движения подъемного сосуда, что может привести к аварийной ситуации. Кроме того, применение блока задания программы с набором программы при помощи наборного поля для каждой подъемной установки значительно усложняет эксплуатацию устройства. Цель изобретения - повышение точности. Эта цель достигается тем, что устройство снабжено счетчиком времени, соединенным -с выходом генератора эталонной частоты, дешиф ратором и триггером, выходы которого сое4динены с суммирующим и вычитающим входами счетчика времени и одним из входов сумматора, другие входы которого подключены соответственно к выходам блока масштаба и счетчика времени, при этом нулевой вход триггера соединен с выходом дешифратора, входы которого подключены к выходам счетчика времени, а единичный вход триггера и вход предварительной установки счетчика времени подключены к выходу блока управления, один из входов которого соединен с инверсным выходом триггера. С целью расширения функциональных возможностей, устройство снабжено дополнительным триггером, выход которого соединен со входом блока управления, тактирующий вход - с выходом дешифратора, а информационный и установочный входы - соответственно с прямым выходом первого триггера и выходом блока управления. На чертеже приведена функциональная схема предлагаемого цифрового устройства для автоматического управления движением шахтной подъемной машины. Устройство содержит датчик пути 1, связанный с валом подъемной машины 2, формирователь импульсов 3, блок управления 4, блок масштаба 5, состоящий из счетчика 6 измерения участков пути, схемы сравнения 7 и счетчика 8 заданных участков пути, сумматор 9, генератор эталонной частоты 10, счетчик времени 11 заданного участка пути, дешифратор 12, триггеры 13 и 14, блок оперативной памяти 15, преобразователь код-аналог 16, усилитель мощности 17, привод 18 подъемной машины, датчик загрузки 19, цепь 20 управления рабочим и цепь 21 управления предохранительным торможением Выход формирователя импульсов 3 соединен со входом блока управления 4 и счетным входом счетчика 6 измерения участков пути, вход установки в исходное положение которого соединен с выходом схемы сравнения 7 и входом блока управления 4. Входы схемы сравнения 7 соединены с соответствующими выходами счетчика 6 измерения участков пути и 8 заданных участков пути. Счетный вход, вход суммирования и вход вытатания импульсов счетчика 8 заданных участков подьслючены к соответствующим Bbf; ходам блока управления 4, q его выходы - с одними из входов сумматора 9, другие входы которого соединены с выходами счетчика времени 11 и входами дешифратора 12. Счетный вход счетчика времени 11 соединен с выходом генератора эталонной частоты 10, входы сум- . мирования и вычитания импульсов соединены с прямым и инверсным выходом триггера 13 и входами сумматора 9, а вход предварительной записи постоянного числа - с выходом блока управления 4, единичным входом триггера 13 и установочным входом триггера 14. Управляющий вход генератора эталонной частоты 10 соединен с выходом блока управления 4. Первый выход дешифратора 12 соедине с нулевым входом триггера 13, а второй - с тактирующим входом триггера 14. Информадионный вход триггера 14 соедине с прял1ым выходом триггера 13, а выход со входом блока управления 4. Инверсный выход триггера 13 соединен со входом блока управления 4. Выходы сумматора 9 соединены с соответствующими входами блока оперативной памяти 15, управляющий вход которого соединен с выходом блока управления 4, а выходы подключены к входам преобразователя код-аналог 16. Выход преобразователя код-аналог 16 соединен с усилителем мощнос ти 17, управляющим приводом 18 подземной мащины 2. К одному из входов блока управ ления 4 подключен датчик загрузки 19 сосуд Цепи управления рабочим 20 и предохранител ным 21 торможением подключены к соответствующим выходам блока управления 4. Датчик пути 1 предназначен для формирова ния сигналов прохождения подъемным сосудом единичных отрезков пути и вместе с фо мирователем 3 задает путевые импульсы, поступающие на вход устройства управления. Блок управления 4 осуществляет задание тахограммы движения подъемной мащины (период разгона, равномерного движения и замедления), запуск подъемной установки, уп равление рабочим и предохранительным тормо жением, а также формирует сигналы, управляющие работой всех блоков профаммноарифметической части устройства. Блок . масщтаба 5 цредназначен для формирования последовательности участков пути, каждый из которых подъемный сосуд должен пройти за постоянно заданный отрезок времени. Счетчик времени 11 предназначен для формирования единичных интервалов времени, за которые подъемный сосуд должен пройти один заданный отрезок пути, а также измерения рассогласования между заданным единичным интервалом времени и временем фактического прохождения подъемным сосудом заданного отрезка пути, величина которого пропорциональна величине рассогласования фактической и заданной скорости движения подъемного сосуда на заданном отрезке пути. Сумматор 9 предназначен ддя алгебраического суммирования кодов, сформированных на выходах счетчика 8 заданных участков пути блока масштаба 5 и счетчика времени 1 Знак сложения или вычитания этих кодов 36 определяется сигналами, формируемыми на выходе триггера 13, а момент суммирования - сигналом, формируемым на выходе блока управлен11я 4, соединенным с соответствующим входом сумматора 9. Блок оперативной памяти 15 -предназначен для хранения результатов вычислений сумматора 9. Момент перезаЬиси информащш с выходов сумматора 9 на входы блока оперативной памяти 15 определяется сигналом, формируемым на выходе блока управления 4, соединенным с соответствуюашм входом блока оперативной памяти 15. Триггер 13 представляет собой RS-триггер и предназначен для формирования сигналов суммирования и вычитания, поступающих на входы счетчика времени. Триггер 14 .представляет собой D-триггер и предназначен для формирования сигнала превышения скорости движения подъемного сосуда выще допустимой. . Преобразователь код-аналог 16 предназначен для преобразования цифрового кода заданной скорости движения блока оперативной памяти в аналоговую величину. Устройство работает следующим образом. Блок управления 4 по сигналам, поступающим с выхода формирования импульсов 3, управляемого датчиком пути 1, в процессе движения подъемной маишны формирует тахограмму движения подъемной машины, определяя величину пути разгона, равномерного хода и замедления. При этом в период формирования пути разгона на суммирующем входе счетчика 8 заданных участков пути блока масщтаба 5 присутствует сигнал, а на вычитающем входе отсутствует. В период формирования пути равномерного движения подъемной машины (от момента окончания разгона до момента начала замедления) на суммирующем и вычитающем входах счетчика 8 заданных )частков пути блока масштаба 5 сигналы отсутствуют, а в период замедления сигнал присутствует на вычитающем входе счетчика 8 и отсутствует на суммирующем. На счетный вход счетчика заданных участков пути 8 сигнал с блока управления 4 поступает каждьш раз после поступления на вход блока управления 4 сигнала с выхода схемы сравнения 7. Таким образом, в процессе разгона подъемной мащины происходит суммирование импульсов, поступающих на вХод счетчика заданных участков пути, увеличивая его содерз1сание по мере разгона подъемной машины (достижения максимальной скорости движения). В период равномерного хода счетчик заданных участков Пути остается в неизменном состоянии, сохраняй значение числа, записанного в момент 7 окошшния разгона. В период (амс/ лсиия происходит вычитание импульсов, поступающих на вход счетчика 8 заданных участков пути, уменьшающих его содержание до нуля, т.е. до момента остановки подъемной машины. На вход счетчика измерения участков пути в блоке масштаба 5 поступают сигналы с выхода формирователя 3. В момент равенства чисел, записанных в счетчике измерения участков пути бив счетчик 8 заданных участков пути, на выходе схемы сравнения 7 формируется сигнал, поступаюший на вход установки счетчика 6 измерения участков пути и устанав ливающий его в исходное состояние и на вход блока управления 4, вызывает формирование на его выходе сигаала, поступающего на счетный вход счетчика 8 заданных участко пути. При этом величина заданных участков пути в период разгона подъемного сосуда последовательно увеличивается, в период равно мерного хода не изменяется и в период замедления последовательно уменьшается. В то же время в связи с тем, что пропорциональн этим изменениям длин, заданных участков пути, должна изменяться величина скорости движения подъемного сосуда, величина времени прохождения подъемным сосудом каждого зада1шого участка пути должна оставаться неизменной и равной постоянно заданной величине. Так как содержание счетчика 8 заданных участков пути оказывается пропорциональным требуемой скорости движения подъемной машины, то. величш1у заданной скорости движения формируют сигналы, поступающие с выходов счетчика заданных участков пути 8 блок масштаба 5 на один из входов сумматора 9. В счетчик времени 11 каждый раз после появления сигналов на выходе схемы сравнения 7 блока масштаба 5 поступает сигнал на вход предварительной записи, формируемый на соответствующем выходе блока управления 4. При этом в момент задания каждого следующего участка пути движения в счетчик вре мени 11 записывается постоянное число, равно заданному времени прохождения подъемным . сосудом одного участка пути (не зависящее от номера участка). Одновременно этот сигнал устанавливаетдриггер 13 в единичное состояние при котором на вычитающий вход счетчика времени II поступает сигнал, а на суммирующем входе сигнал отсутствует. Тогда сигналы поступающие на счетный вход счетчика времени 11, начинают последовательно уменьшать его содержимое до момента, когда он переходит в нулевое состояние и на первом выходе дешифратора 12 появляется сигнал, вызывающий опрокидывание триггера 13. Это вызывае появление сигнала на суммирующем входе счетчика времени 11, который начинает суммирование импульсоВ( поступающих с выхода генератора эталонной частоты 10. Если движение подъемной машины происходит с заданной скоростью, то время прохождения каждого заданного участка пути будет равно числу, предварительно записанному в счетчике времени 11, т.е. в момент появления сигнала на первом выходе дешифратора 12 на выходе схемы сравнения 7 должен формироваться сигнал окончания прохождения подъемным сосудом заданного отрезка пути. Если же скорость движения подъемной машины отличается от заданной, то в момент появления сигнала на выходе схемы сравнения 7 в блоке измерения времени будет записано некоторое число, величина которого определяется разностью между значениями величины заданной и фактической скорости движения, а знак определяется сигналами, формируемыми на прямом и инверсном выходах триггера 13 (если фактическая скорость движения больще заданной, то счетчик времени 11 не успеет дойти до нуля, а если фактическая скорость движения меньше заданной, то значение показаний счетчика времени 11 перейдет через нулевое значение). Сигнал на втором выходе дешифратора 12 формируется в момент, когда в счетчике времени 11 записано некоторое число, определяющее максимально допустимую величину времени прохождения подъемным сосудом заданного участка пути (в соответствии с Правилами безопасности). В момент задания каждого нового участка путр триггер 14 устанавливается сигналом, поступающим на его вход установки в состояние, при котором на его выходе сигнал отсутствует. При нормальном движении подъемной машины в процессе. изменения состояний счетчика времени 11 при вычитании импульсов, поступающих на его вход с генератора эталонной частоты 10 (сигнал на прямом выходе триггера 13), на втором выходе дешифратора 12 появится сигнал, и триггер 14 опрокинется в единичное состояние. При этом в момент появления сигнала на выходе схемы сравнения 7 на выходе триггера 14 будет присутствовать сигнал. В случае, если фактическая скорость движения подъемной машины превысит допустимую, в момент появления сигнала на выходе схемы сравнения 7 на втором выходе деишфратора 12 сигнал сформироваться не успеет, и триггер 14 останется в нулевом состоянии, что будет соответствовать аварии. В случае, если фактическая скорость движения подъемной машины резко уменьшится и станет ниже донустимой (или выйдет из строя датчик пути 1), после появления сигнала на втором выходе дешифраторе 12 в процессе работы счетчика времени на вычитание (сиг9нал на прямом выходе триггера 13) триггер 14 сначала опрокинется в единичное состояние а затем после прихода счетчика времени 11 в нуль и перехода его на суммирование импул сов от генератора эталонной частоты 10 (сигнал на инверсном выходе триггера 13) на втором выходе дешифратора 12 вновь формируется сигнал, вызывающий опрокидывание триггера 14 вновь в нулевое состояние. На инверсном выходе триггера 13 будет присутствовать сигнал, а на выходе триггера 14 отсутствовать сигнал, что свидетельствуето наличии аварийной ситуации с подъемной машиной Рассмотрим работу устройства с момента пуска подъемной машины. При поступлении на вход блока управления 4 сигнала окончани загрузки сосуда от датчика загрузки 19 блок управления формирует команду на начало движения машины. При этом на суммируюший вход счетчика задания участков пути 8 поступает сигнал, разрешающий суммирование импульсов, а на счетный вход - один импульс, соответствующий началу движения по первому участку пути. Одновременно блок управления 4 формирует сигнал, поступающий на вход установки в единичное состояние триггера 13, в нулевое состояние триггера 14 и вход предустановки счетчика времени 11. При этом в счетчик времени 11 записывается постоянное число, равное времени прохождения подае ным юсудом заданного участка пути. Сигнал, поступающий с прямого выхода триггера 13 переводит счетчик времени 11 в режим вычитания импульсов, поступающих на его вход с выхода генератора эталонной частоты 10. При движении подъемной машины датчик пути 1 выдает сигнал о прохождении подъемным сосудом единичного отрезка пути, на выходе формирователя 3 появится импульс. поступающий на вход счетчика измерения участ- 40 ков пути 6. Числа, записанные в счетчиках измерения 6 и задания 8 участков пути сравниваются, и на выходе схемы сравнения 7 появится сигнал. При появлении этого импульса счетчик измерения участков пути 6 устанавливается в исходное состояние. В этот же момент сигнал со схемы сравнения 7 череэ блок управления поступает на вход управления генератора эталонной частоты 10, прекращая формирование импульсов эталонной частоты и останавливая счетчик времени 11, на вход сумматора 9, разрешая алгебраическое суммирование ходов чисел, записанных в счетчике задания участков пути 8 и счетчике времени П. Если движение подъемной машины происходило с заданной скоростью, в момент появления сигнала на выходе схемы сравнения 7 счетчик блока измерения времени должен находиться в нулевом состоянии (т.е. 5 импульсы генератора эталонной частоты 10 спирали код числа, предварительно установленного в счетчике времени 11); если движение подъемной машины происходило быстрее заданного, в счетчике времени 11 в момент появления сигнала на выходе схемы сравнения 7 останется неописанным остаток числа, предварительно записанного в него до начала движения, пропорционального разности между действительной и заданной скоростью; если движение подъемной мащины происходило медленнее заданного, счетчик времени 11 в момент появления сигнала на выходе схемы сравнения 7 полностью спишет число, предварительно записанное в него до начала движения и запишет новое число, пропорциональное разности между действительной и заданной скоростью. При этом в первом случае в сумматор 9 вводится только код счетчика 8 задания участков пути, во-втором случае этот код суммируется с кодом, записанным в счетчике времени 11, а в третьем слз/чае от этого, к ода вычитается код, записанный в счетчике времени 11 (знак суммирования или вычитания кодов в сумматоре 9 задает триггер 13). После окончания времени работы сумматора 9 результат предписывается в блок оперативной памяти 15 по сигналу, поступающему с блока управления 4,. Преобразователь код-аналог 16 формирует новое значение уставки, поступаюшей через усилитель мощности 17 на привод 18 подъемной машины 2. После выдачи команды на отработку привода на вход счетчика 8 задания участков пути поступает новый импульс, переводящий счетчик 8 во второе состояние, а затем на единичный вход триггера 13 и установочный вход триггера 14 поступает сигнал, устанавливающий триггер 13 в единичное, а триггер 14 в нуле ° состояния и записывающий в счетчик времени II постоянное число, соответствующее требуемому времени прохождения участка пути. При поступлении на вход счетчика измерения участков пути 6 двух импульсов, сформироваиных формирователем 3, на выходе схемы сравнения 7 появится сигнал и сумматор 9 по сигналу блока управления 4 произведет алгебраическое суммирование кодов чисел, записанных в счетчике 8 задания участков пути и счетчике времени 11, после чего в счетчик 8 задания участков пути запишется следующий импульс. Таким образцм, производится последовательный разгон подъемной машины до максимальной скорости движения. При этом на каждом новом участке пути производится коррекция заданного значения скорости в соответствии с фактическим режимом движения. После достижения подъемной машиной максимальной скорости движения блок управления прекращает подачу сигналов сложения и вычитания на входы счетчика задания участков пути 8, и программа задания скорости в счетчике 8 задания пути на участке ра.вномер ного хода остается неизменной. Порядок работы при этом не меняется, т.е. в счетчике 8 задания участков пути остается постоянное число и после установления в счетчике измерения участков пути 6 числа, соответствующего числу, записанному в счетчике 8 задания участков пути, на выходе схемы сравнения 7 формируется сигнал, после которого сумматором 9 производится коррекция заданного значения скорости движения по Показаниям сч чика времени 11. В момент начала замедления подъемной машины блок управления 4 формирует сигнал вычитания, поступающий на соответствующий вход счетчика задания з астков пути 8, иподъемная машина начинает процесс замедления аналогично, как и при разгоне, в соответствии с заданной программой. При приходе счетчика зад4ния участков пути 8 в нуль блок управления 4 формирует команду на включение цепи 20 рабочего тормоза. Использование устройства имеет ряд сущест венных преимуществ. Минимальная заданная величина участка пути и пропорционалыюе ей минимальное значение приращения величины скорости движения определяется только разрешающе способностью датчика пути. Количество участков пути, на которых возможно «изменение и регулирование скорости, имеет широкие пре делы, что обеспечивает возможность плавной регулировки величины скорости движения с высокой точностью. Это позволяет повысить производительность подъемной установки за счет приближения рабочей тахограммы движения к защитной. .Устройство позволяет контролировать не только снижение скорости движения подъемной машины ниже допустимой (затянувшийся пуск, выход из строя датчика пути, формирователя и т.д.), но и превышение фактической скорости движения на каждом из участков пути движения, что повышает безопасность движения. Крометого, величина рассогласования между действительной и заданной скоростями движения подъемной машины определяется усредненоi. за период движения подъемной машины по заданному участку пути. Это позволяет увеличить точность коррекции программы за312Дания скорости движения и исключить путевой датчик коррекции программы. Формулаизобретения 1. Цифровое устройство для автоматического управления движением шахтной подъемной мащины, содержащее датчик пути, соединенный через формирователь импульсов с блоком управления и блоком масштаба, датчик загрузки сосуда, цепи управления рабочим и предохранительным торможением, подключенные к блоку управления, сумматор, вход которого соединен с выходом блока управления, а выходы подключены к блоку оперативной памяти, преобразователь код-аналог, входы которого соединены с выходами блока оперативной памяти, а выход через усилитель мощности подключен к приводу подъемной мащины, и генератор эталонной частоты, отличающ е-е с я тем, что, с целью повышения точности, оно снабжено счетчиком времени, соединенными с выходом генератора эталонной частоты, дешифратором и триггером, выходы которого соединены с суммирующим и вычитающим входами счетчика времени и одним из входов сумматора, другие входы которого подключенъ соответственно к выходам блока масщтаба и счетчика времени, при этом нулевой вход триггера соединен с выходом дешифратора, входы которого подключены к выходам счетчика врсгленк, а единичный вход триггера и вход предварительной установки счетчика времени подключены к выходу блока управления, один из входов которого соединен с инверсным выходом триггера. 2. Устройство по п. 1, отличающееся тем, что, с целью расщирения функциональных возможностей, оно снабжено дополнительным триггером, выход которого соединен со входом блока управления, тактирующий вход - с выходом дешифратора, а информационный и установочный входы - соответственно с прямым выходом первого триггера и выходом блока управления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №217618, кл. В 66 В 1/24, 17.04.67. 2.Патент США № 3851735, кл. 187-29, 1975. 3.Авторское сввдетельство СССР Г 475336, КЛ; В 66 В 1/00, 17.11.69 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1983 |
|
SU1123022A2 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1987 |
|
SU1474061A1 |
| Цифровое устройство для автоматического управления движением шахтной подъемной машины | 1969 |
|
SU475336A1 |
| Устройство для программного управления | 1981 |
|
SU960740A2 |
| Устройство для программного регулирования скорости подъемной машины | 1976 |
|
SU611844A1 |
| Цифровое программное устройство для задания скорости для шахтных подъемных машин | 1978 |
|
SU765174A1 |
| Устройство управления приводом шахтной подъемной машины | 1977 |
|
SU730631A1 |
| Система управления подъемником | 1977 |
|
SU622737A1 |
| Устройство управления шахтной подъемной установкой | 1985 |
|
SU1331783A1 |
| Устройство для управления шахтной подъемной машиной | 1986 |
|
SU1502451A1 |