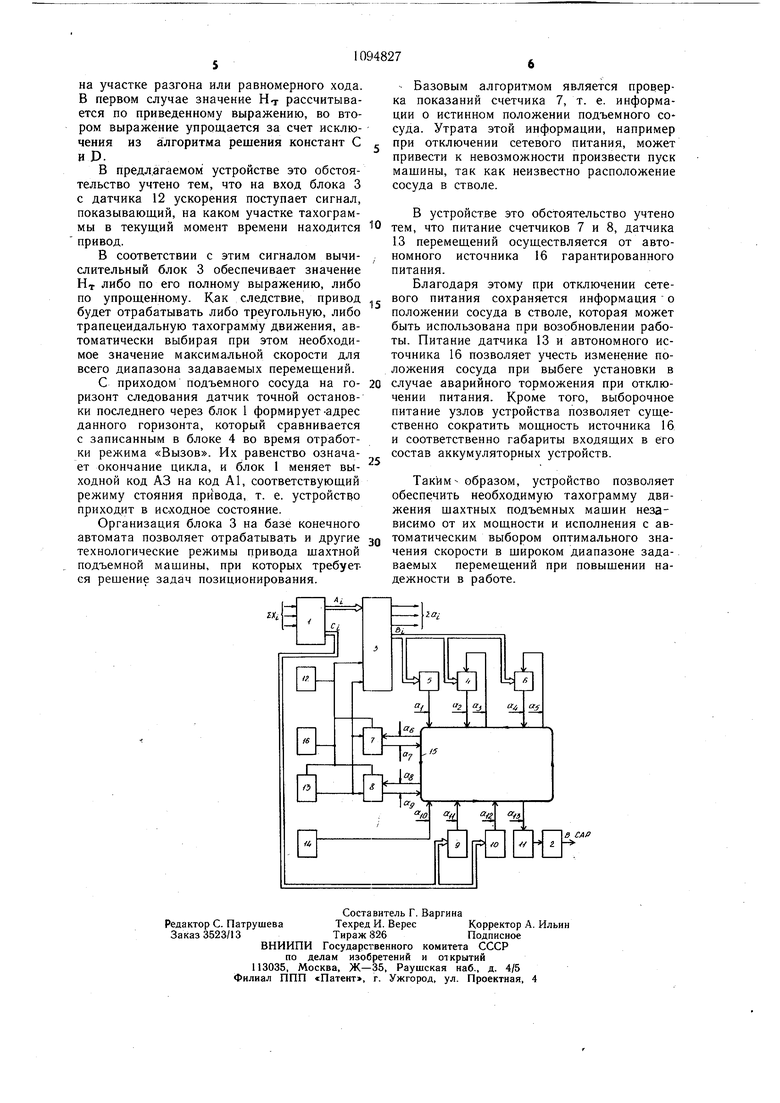
Изобретение относится к устройствам управления шахтной подъемной машиной, а точнее к устройствам задания, программы движения шахтной подъемной машины. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления режимами работы шахтного подъемника, содержащее блок формирования управляющих сигналов, связанный одним.из выходов с вычислительным блоком, информационные выходы которого связаны с входом блока постоянной памяти и одним из входов блоков оперативной памяти и сравнения. другие входы которых подключены к магистральной шине параметров движения подъемника, с которой связаны также вход командного блока и выходы датчика скорости, блока фиксации отметок горизонта, соединенноТо входом с другим вь1ходом блока формирования управляющих сигналов, и счетчика импульсов перемещения подъемника, управляющий вход которого также подключен к магистральной шине, а счетный - к соединенному с другим входом вычислительного блока выходу импульсного датчика перемещения подъемника, причем все подключенные к магистральной шине параметров движения подъемника входы и выходы вышеупомянутых блоков, счетчика и датчика скорости связаны с управляюшими выходами вычислительного блока 1. Однако выдача расчетного значения скорости в каждой точке пути производится в предположении, что привод точно следует заданному значению скорости. Последнее возможно лишь при наличии контура регулирования положения, которому подчинен контур регулирования скорости. Подобная система предполагает использование быстродействующих приводов с высокими коэффициентами усиления, что в большинстве случаев непригодно для шахтных подъемных машин, обладающих большими моментами инерции с наличием упругих связей в виде подъемных канатов. Подобные системы могут найти ограниченное применение лищь для приводов малой мощности при малый высотах подъема, т. е. в случаях, когда привод обладает малой инерционностью, а упругостью канатов можно пренебречь. Недостатком известного устройства является также низкая надежность в работе, связанная с отсутствием средств контроля работы узлов устройства, особенно в части передачи информации о положении сосуда в стволе и ее хранения в аварийных ситуациях, например при отключении питания. К недостаткам устройства следует отнести также и способ задания максимальной скорости перемешения. В зависимости от величины заданного перемещения декадным переключателем устанавливается значение максимальной скорости с определенным шагам дискретности. Обеспечить оптимальный выбор максимальной скорости по всем диапазоне перемещений не представляется возможным, что в ряде случаев ведет к потере производительности установки. Цель изобретения - повышение надежности. Цель достигается тем, что устройство снабжено задатчиком интенсивности движения, датчиком ускорения, подключенным к третьему входу вычислительного блока, и дополнительным блоком фиксации отметки горизонтов, и счетчиком, счетный ™-- С.С.МП.Ч.М, СЧС1ПЫИ ° которого соединен с вышеупомянутым выходом импульсного датчика перемеще™« подъемника, управляющий вход котоР° ° ° « дополнительного блока фиксации отметок горизон™« подключены к магистральной шине параметров движения и связаны с управляю выходами вычислительного блока, задатчика интенсивности выходом командного блока, а вход Дополнительного блока фиксации отметок горизонтов соединен с указанным другим выходом блока формирования управляюnui vri rrtr rt xj rtf TtC4Ji a 7гшао rratrvщих сигналов. Кроме того, устройство снабжено автоHOMHbiM источником гарантированного питания, питающим импульсный датчик перемещения подъемника, счетчик импульсов перемещения подъемника и дополнительный счетчик. На чертеже представлена блок-схема устройства. Устройство содержит блок 1 формирования управляющих сигналов, задатчик 2 интенсивности движения, вычислительный блок 3, блок 4. оперативной памяти, блок 5 постоянной памяти и блок 6 сравнения, счетчик 7 импульсов перемещения подъемника, счетчик 8, блок 9 фиксации отметок горизонтов, дополнительный блок 10 фиксации отметок горизонтов, командный блок 11, датчик 12 ускорения, импульсный датчик 13 перемещения подъемника, датчик 14 скорости, магистральную шину данных 15, автономный источник 16 гарантированного питания. Устройство работает следуюшим образом. Допустим, что подъемный сосуд находит на одном из горизонтов шахты. Датчик точной остановки последнего через блок формирования управляющих сигналов формирует адрес .данного горизонта на шинах блоков 9 и 10. При этом содержанием блока 9 фиксации отметок горизонтов являются отметки горизонтов шахты в масштабе импульсов перемещения с началом отсчета от верхнего горизонта шахты, а содержанием дополнительного блока 10 фиксации отметок
горизонтов-отметки горизонтов с началом отсчета от нижнего ropH3OHta шахты.
При отсутствии сигнала «Вызов блоком 1 формирования сигналов управляющих сигналов формируется код А режима стояния привода. В соответствии с кодом А блок 3 генерирует последовательность сочетаний управляющих сигналов а и адресов bj. При этом сигналы обеспечивают управление шинами, связывающими элементы устройства с магистральной шиной 15 данных, а адрес bj определяет какие из элементов устройства участвуют в обмене информации.
Отработка- по обеспечению режима стоянки привода начинается с выдачи блоком 3 сочения сигналов из, ие, Ofi и адреса В1. При этом производится запись в блок 4 и сче-йчик 7, извлекаемая из блока 9.
Сочетание % ; а,; а и адрес В2 обеспечивают запись отметки горизонта нахождения сосуда (с началом отсчета от нижнего горизонта) вблок 4 и счетчики 8. По адресу- ВЗ и сочетанию ag, а производится передача показаний счетчика 7 в блок 6 сравнения. По адресу В4 и сигналам а,; а, npqизводится сложение показаний счетчика 7 и счетчика 8. Результат сложения по адресу В5 и сигналам at; ug сравнивается с значением расстояния между крайними горизонтами, которое в масштабе импульсов перемещения содержится в блоке 5. Если имеет место равенство, то это говорит о достоверности показаний счетчика 7 и последние могут быть использованы для решения последующих задач. При отсутствии равенства через командный блок 11 формируется сигнал на запрет пуска.
Описанный алгоритм работы устройства является базовым, так как решение любых позиционных задач начинается с момента получения достоверной информации о нахождении сосуда.
При появлении сигнала «Вызов с какого-нибудь горизонта блоком 1 генерирует ся код А1 режима «Вызов и адрес горизонта вызова. При этом блок 3 после окончания отработки режима стоянки привода генерирует код В6 и сочетание а,; аи , благодаря чему производится запись в оперативную память блока 4 и блока 6 сравнения отметок горизонта следования. По. коду В7 и сигналам а, производится операция вычитания из содержимого блока 6 показаний счетчика 7. Результат вычисления представляет собой расстояние, на которое необходимо переместить сосуд, а знак разности определяет собой необходимое направление движения. Кодом В 8 и сигналами а,; Ои производится запись результата вычислений в блок 4 и вывод сигнала направления движения через блок 11 на задатчик 2 интенсивности. Последний выполнен известным образом и обеспечивает
развертку сигнала на скорость во времени с учетом ограничений на рывок, ускорение и максимальную скорость.
С включением задатчика 2 интенсивности подъемная установка начинает движение в направлении и заданной точке позиционирования, в связи с чем блок 1 генерирует код режима «Движение. Реальное движение установки фиксируется датчиком скорости и импульсным датчиком 13 перемещения подъемника. Для одного направления движения импульсы перемещения с датчика 13 поступают на шины сложения счетчика 7 и шины вычитания счетчика 8. Для другого направления движения картина обратная. Таким образом, при движении подъемной установки показания одного счетчика уменьшаются, другого-увеличиваются.
С приходом очередного импульса перемещения с датчика 13 и в соответствии с кодом режима «Движение блоком 3 отрабатывается последовательность адресов Bj и сигнала а; с целью определения точки начала замедления.
Для этого после проверки показаний счетчика 7 с помощью блока 6. определяется и фиксируется блоком 4 расстояние между текущим положением, сосуда и отметками горизонта следования. Затем через магистральную щину данных 15 снимаются показания датчика 14 скорости и блоком б определяется необходимый путь замедления в предположении, что привод должен тормозиться с текущего значения скорости. Решение о необходимости торможения принимается блоком 6 путем сравнения полученного пути торможения с раннее зафиксированным расстоянием между текущим положением сосуда и отметкой горизонта -следования. Если последнее больше необходимого пути замедления, то через блок 11 разрешается движение сосуда с заданной скоростью. Равенство указанных расстояний свидетельствует о достижении точки начала замедления, и блок 6 через магистральную шину 15 и блок 11 обеспечивает команду на отработку задатчиком интенсивности 2 кривой замедления привода.
Определение блоком 6 пути замедления в функции текущего значения скорости при заданных рывке и ускорении производится по выражению
H.r V(A-V-fB+C)+D, где HT - путь замедления;
V - текущее значение скорости; А,Б,С - константы, определяемые выбранными значениями для рывка и ускорения и содержащиеся в блоке 5.
Для одного и того же значения скорости тормозной путь может быть разным в зависимости от того, на каком участке таходиаграммы должно начаться торможение -
на участке разгона или равномерного хода. В первом случае значение Нт рассчитывается по приведенному выражению, во втором выражение упрощается за счет исключения из алгоритма решения констант С HD.
В предл.агаемом устройстве это обстоятельство учтено тем, что на вход блока 3 с датчика 12 ускорения поступает сигнал, показываюш.ий, на каком участке тахограммы в текущий момент времени находится привод.
В соответствии с этим сигналом вычислительный блок 3 обеспечивает значение HT либо по его полному выражению, либо по упрощенному. Как следствие, привод будет отрабатывать либо треугольную, либо трапецеидальную тахограмму движения, автоматически выбирая при этом необходимое значение максимальной скорости для всего диапазона задаваемых перемещений.
С приходом подъемного сосуда на горизонт следования датчик точной остановки последнего через блок 1 формирует-адрес данного горизонта, который сравнивается с записанным в блоке 4 во время отработки «Вызов. Их равенство означает окончание цикла, и блок 1 меняет выходной код A3 на код А1, соответствующий режиму стояния привода, т. е. устройство приходит в исходное состояние.
Организация блока 3 на базе конечного автомата позволяет отрабатывать и другие технологические режимы привода шахтной подъемной машины, при которых требуется решение задач позиционирования.
Базовым алгоритмом является проверка показаний счетчика 7, т. е. информации о истинном положении подъемного сосуда. Утрата этой информации, например при отключении сетевого питания, может привести к невозможности произвести пуск машины, так как неизвестно расположение сосуда в стволе.
В устройстве это обстоятельство учтено тем, что питание счетчиков 7 и 8, датчика 13 перемещений осуществляется от автономного источника 16 гарантированного питания.
Благодаря этому при отключении сетевого питания сохраняется информация о положении сосуда в стволе, которая может быть использована при возобновлении работы. Питание датчика 13 и автономного источника 16 позволяет учесть изменение положения сосуда при выбеге установки в случае аварийного торможения при отключении питания. Кроме того, выборочное питание узлов устройства позволяет существенно сократить мощность источника 16 и соответственно габариты входящих в его состав аккумуляторных устройств.
Таким- образом, устройство позволяет обеспечить необходимую тахограмму движения щахтных подъемных мащин независимо от их мощности и исполнения с автоматическим выбором оптимального значения скорости в щироком диапазоне задаваемых перемещений при повышении надежности в работе.

| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь эталонной скоростидля уСТРОйСТВ зАщиТы шАХТНыХпОд'ЕМНыХ уСТАНОВОК | 1978 |
|
SU844533A1 |
| Формирователь эталонной скорости для устройств защиты шахтных подъемных установок | 1982 |
|
SU1158471A2 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство для регулирования скорости шахтного подъемника | 1978 |
|
SU779230A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ, КОНТРОЛЯ ДВИЖЕНИЯ И ТЕХНОЛОГИЧЕСКИХ ЗАЩИТ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 2005 |
|
RU2314990C2 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1989 |
|
SU1745659A1 |
| Способ контроля движения сосуда шахтной подъемной установки | 1989 |
|
SU1684212A1 |
| Устройство для контроля величины вытяжки каната шахтной подъемной установки | 1983 |
|
SU1189774A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1990 |
|
SU1794844A1 |
1УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ШАХТНОГО ПОДЪЕМНИКА, содержащее блок формирования управляющих сигналов, связанный одним из выходов с вычислительным блоком, информационные выходы которого связаны С входом блока постоянной памяти и одним из входов блока оперативной памяти и сравнения, другие входы которых подключены к магистральной щине параметров движения подъемника, с которой связаны также вход командного блока и выходы датчика скорости, блока фиксации отметок горизонта, соединенного входом с другим выходом блока формирования управляющих сигналов, и счетчика импульсов перемещения подъемника, управляющий вход которого также подключен к магистральной шине, а счетный - к соединенному с другим входом вычислительного блока выходу импульсного датчика перемещения -подъемника, причем все подключенные к магистральной щине параметров движения подъемника входы и выходы выщеупомянутых блоков, счетчика и датчика скорости связаны с управляющими выходами вычислительного блока, отличающееся тем, что, с целью повыа ения надежности, оно снабжено задатчиком интенсивности движения, датчиком ускорения, подключенным к третьему входу вычислительного блока, и дополнительным блоком фиксации отметок горизонтов, и счетчиком счетный вход которого соединен с вышеупомянутым выходом импульсного датчика перемещения подъемника, управляющий вход которого, а также его выход и выход дополнительного блока фиксации отметок горизонтов подключены к магистральной шине (Л параметров движения и связаны с управляющими выходами вычислительного блока, причем вход задатчика интенсивности движения соединен с выходом командного блока, а вход дополнительного блока фиксации отметок горизонтов соединен с указанным другим выходом блока формирования управляющих сигналов. со оо ю 2. Устройство по п. 1 отличающееся тем, что оно снабжено автономным источником гарантированного питания, питающим импульсный датчик перемещения подъемника, счетчик импульсов перемещения подъемника и дополнительный счетчик.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Josef Fisher Digitaler Fahrkurvenrechner fflr Positionveranlagen | |||
| - «Fechische milfelungen AEG - TELEFUNKEN, 66 Jahrgang | |||
