10
15
11 i27042
Изобретение относится к строительным машинам и предназначено для расширения эксплуатационных возможностей машин в условиях многофункционального эффективного их использования.
Целью изобретения является расши- . рение технологических возможностей экскаватора при использовании пневмо- колесной ходовой части.
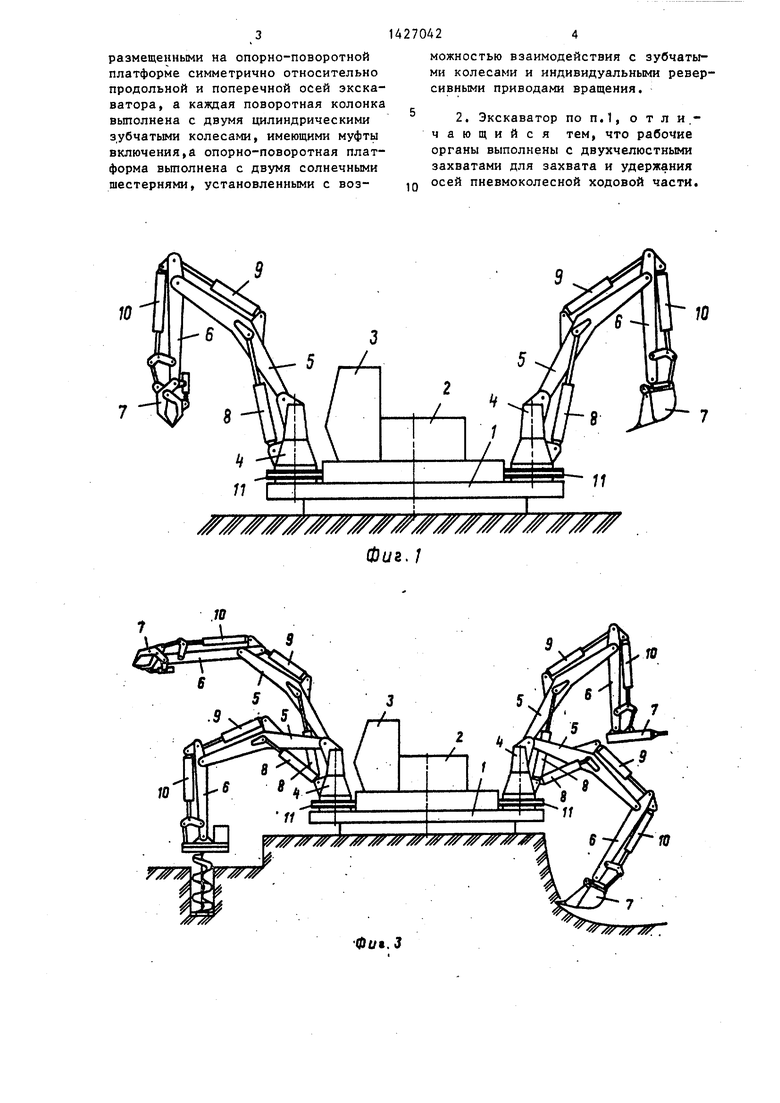
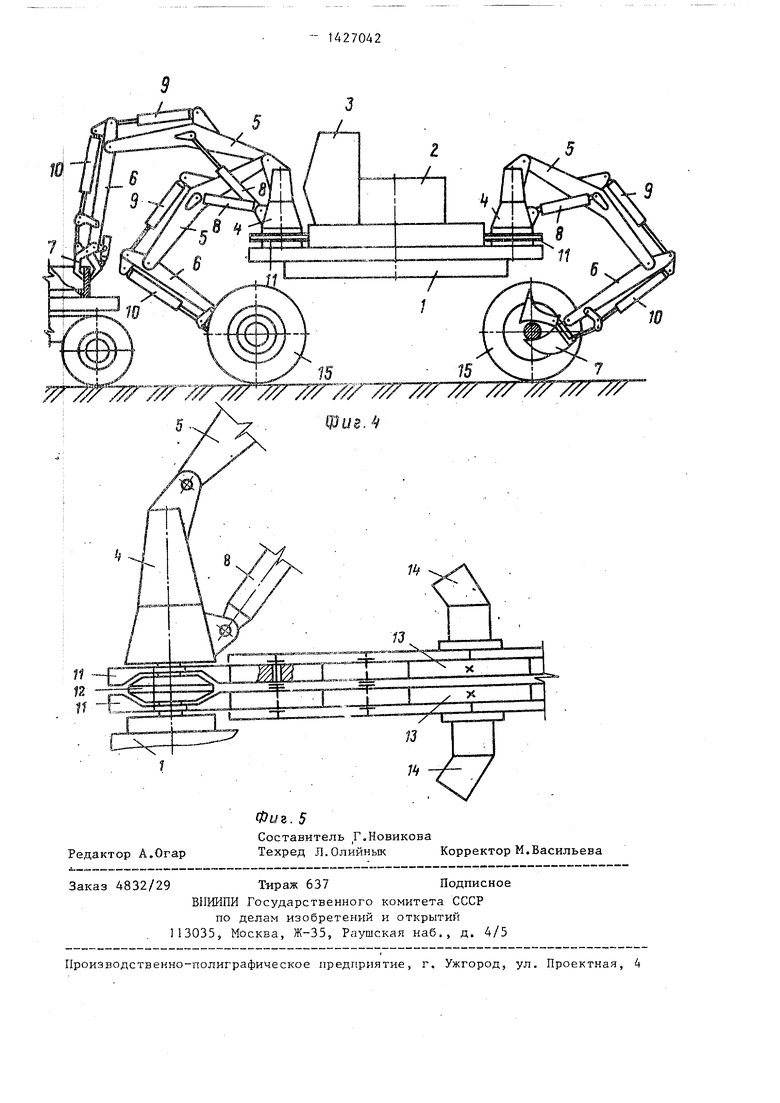
На фиг, 1 показан экскаватор, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - то же, в работе; на фиг. 4 - то же, в процессе транспортирования; на фиг. 5 - механизм привода поворотных колонок.
Экскаватор включает опорно-поворотную платформу 1, на которой расположены силовая установка 2, кабина 3 управления, поворотные колонки 4. К поворотным колонкам 4 шарнирно прикреплены стрела 5, рукоять 6, рабочий орган 7, которые приводятся в дви жение посредством соответствующих гидроцилиндров 8-10. На поворотных колонках 4 установлены цилиндрические зубчатые колеса 11, оснащенные муфтами 12 включения, а на опорной платформе .1 установлены две солнечные шестерни 13 с индивидуальными реверсивными приводами 14 вращения. При транспортировании экскаватор опирается на две оси пневмоколесной ходовой части 15, которые устанавливаются путем захвата их и удержания в
20
25
30
нительных рабочих органов 7 в плане осуществляется путем поворота колонок 4. При этом вращение от индивидуальных реверсивных приводов 14 вр щения при помощи солнечных цилиндри ческих щестерен 13 передается на цилиндрические зубчатые колеса 11, смонтированные на поворотных колонках 4. Включанием соответствующих муфт 12 достигается передача крутящего момента на поворотные колонки
4по часовой стрелке или против часовой стрелки. При этом поворотные колонки 4 могут вращаться синхронно в одном направлении и навстречу дру Другу, что очень важно, когда испол нительные рабочие органы 7 вьтолняю совместно какую-либо операцию.
В качестве исполнительных рабочи органов 7 могут быть установлены двухчелюстной ковш, двухчелюстной захват, гидропружинный молот, шнековый бур и т.п. I
При транспортировании экскаватор с объекта на объект или в пределах строительной площадки при помощи двухчелюстньпс захватов и двухчелюст- ных ковщей исполнительных рабочих органов 7 осуществляется схват осей пневмоколесной ходовой части 15 и установка их путем поворота стрел
5и рукоятей 6 в требуемое положени Затем.один из исполнительных рабочих
требуемом полоясении посредством двух-35 органов 7 в виде двухчелюстного захвата схватывается за раму ходовой части, платформу или кузов движущег ся транспортного средства и в таком положении строительная машина транспортируется в нужном направлении (фиг.4).
челюстных захватов исполнительных рабочих органов.
Экскаватор работает следующим образом.
Посредством опорно-поворотной платформы 1 экскаватор опирается на грунтовое основание строительной площадки при предварительно выведенных за пределы опорного контура и опущенных осях пневмоколесной ходовой час- ти 15. Затем в работу включаются соответствующие исполнительные рабочие органы 7, которые могут выполнят индивидуальные операции или работать попарно в зависимости от технологии производства работ и специфики строящегося объекта (фиг.З). В процессе выполнения соответствующих технологических операций пйложение рабочих органов 7 может корректироваться путем поворота стрелы 5, рукоятки 6 и самого органа 7 посредством соответствующих гидроцилиндров 8-10 управления. Поворот испол
0
5
0
5
0
нительных рабочих органов 7 в плане осуществляется путем поворота колонок 4. При этом вращение от индивидуальных реверсивных приводов 14 вращения при помощи солнечных цилиндрических щестерен 13 передается на цилиндрические зубчатые колеса 11, смонтированные на поворотных колонках 4. Включанием соответствующих муфт 12 достигается передача крутящего момента на поворотные колонки
4по часовой стрелке или против часовой стрелки. При этом поворотные колонки 4 могут вращаться синхронно в одном направлении и навстречу друг Другу, что очень важно, когда исполнительные рабочие органы 7 вьтолняют совместно какую-либо операцию.
В качестве исполнительных рабочих органов 7 могут быть установлены двухчелюстной ковш, двухчелюстной захват, гидропружинный молот, шнековый бур и т.п. I
При транспортировании экскаватора с объекта на объект или в пределах строительной площадки при помощи двухчелюстньпс захватов и двухчелюст- ных ковщей исполнительных рабочих органов 7 осуществляется схват осей пневмоколесной ходовой части 15 и установка их путем поворота стрел
5и рукоятей 6 в требуемое положение. Затем.один из исполнительных рабочих
органов 7 в виде двухчелюстного за
хвата схватывается за раму ходовой части, платформу или кузов движущегося транспортного средства и в таком положении строительная машина транспортируется в нужном направлении (фиг.4).
Формула изобр-етения
1. Экскаватор, включающий силовую установку, ходовую часть, опорно-поворотную платформу, установленную на ней кабину управления, установленное на поворотной колонке рабочее оборудование с шарнирно сочлеченными стрелой, рукоятью и рабочим органом, гидроцилиндры управления элементами рабочего оборудования, отличающийся тем, что, с целью расширения технологических возможностей при использовании пневмоколесной ходовой части, экскаватор снабжен до- цолнительными комплектами рабочего оборудования с поворотными колонками.
размещенными на опорно-поворотной платформе симметрично относительно продольной и поперечной осей экскаватора, а каждая поворотная колонка выполнена с двумя цилиндрическими зубчатыми колесами, имеющими муфты включения,а опорно-поворотная платформа вьшолнена с двумя солнечн1 1ми шестернями, установленными с воз
можностью взаимодействия с зубчатыми колесами и индивидуальными реверсивными приводами вращения.
2. Экскаватор по п.1, о т л и.- чающийся тем, что рабочие органы выполнены с двухчелюстными захватами для захвата и удержания осей пневмоколесной ходовой части.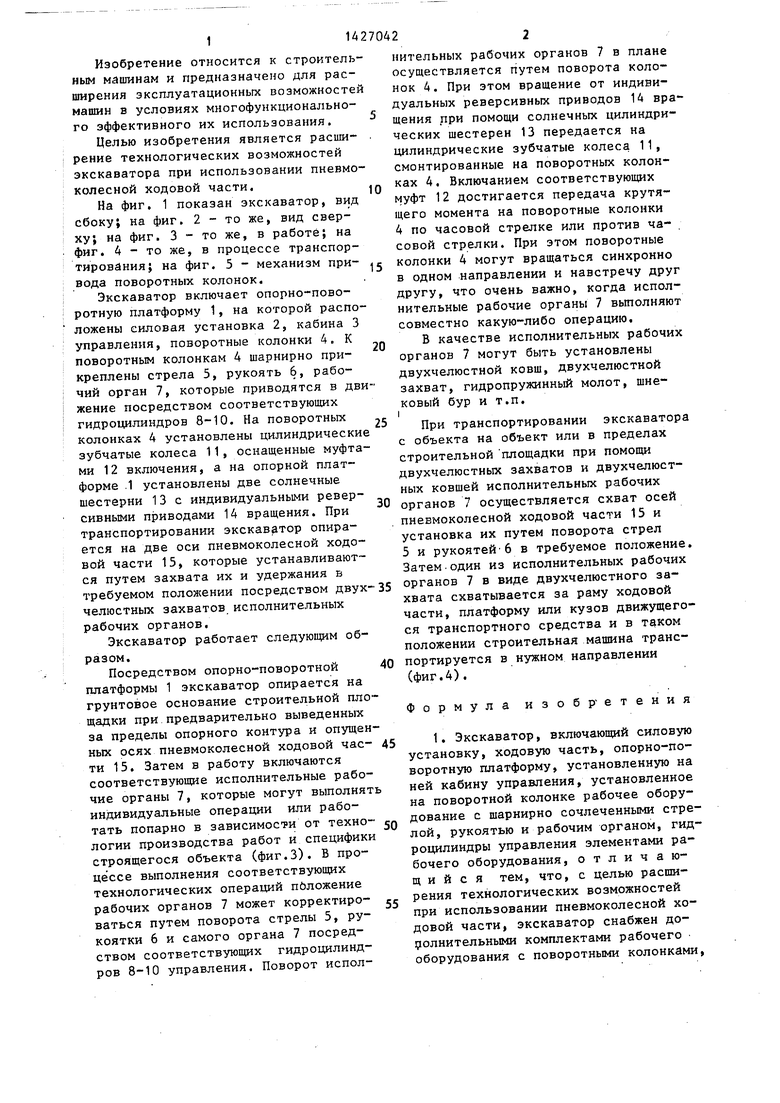
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
| КОЛЕСНЫЙ ГИДРАВЛИЧЕСКИЙ ЭКСКАВАТОР | 2000 |
|
RU2185481C2 |
| УСТРОЙСТВО ДЛЯ ОТРАБОТКИ ОТКОСОВ УСТУПОВ | 2016 |
|
RU2618806C1 |
| Экскаватор | 1989 |
|
SU1684437A1 |
| Устройство для ремонта металлургических агрегатов | 1980 |
|
SU863647A1 |
| Инженерная система машины разграждения | 2022 |
|
RU2782621C1 |
| ПНЕВМОКОЛЕСНЫЙ ЭКСКАВАТОР | 2000 |
|
RU2184193C2 |
| РАБОЧЕЕ ОРУДИЕ | 1991 |
|
RU2046885C1 |
| Миниэкскаватор | 1989 |
|
SU1666662A1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
Изобретение относится к строительным машинам и предназначено для расширения эксплуатационных возможностей машин в условиях многофункционального эффективного их использования. Цель изобретения - расширение технологических возможностей экска- при использовании пневмоколес- ной ходовой части. Экскаватор включает силовую установку 2, опорно-поворотную платформу 1 и установленное на поворотной колонке (ПК) 4 рабочее оборудование. Рабочее оборудование включает шарни рно сочлененные стрелу 5, рукоять 6 и рабочий орган (РО) 7. На каждой ПК 4 установлены цилиндрические зубчатые колеса 11 с муфтами включения. На опорной поворотной платформе 1 установлены солнечные шестерни с индивидуальными реверсны- ми приводами вращения. Положение РО 7 в процессе выполнения соответствующих технологических операций регулируется посредством гидроцилиндров 8,9,10. Поворот РО 7 в плане осуществляется путем поворота ПК 4. При этом вращение от приводов передается на цилиндрические зубчатые колеса 11, смонтированные на ПК 4, Последние могут вращаться синхронно в одном направлении и навстречу друг другу, когда РО 7 выполняют совместно какую-либо операцию. Вьтолнены РО 7.с двухчелюстными захватами для захвата и удержания осей пневмоколе сной хо- повой части. 1 з.п. ф-лы, 5 ил. « // я . 9 S S fO S 4 ю 4 Ю 1Q Фиг.г 4 И д д 5 7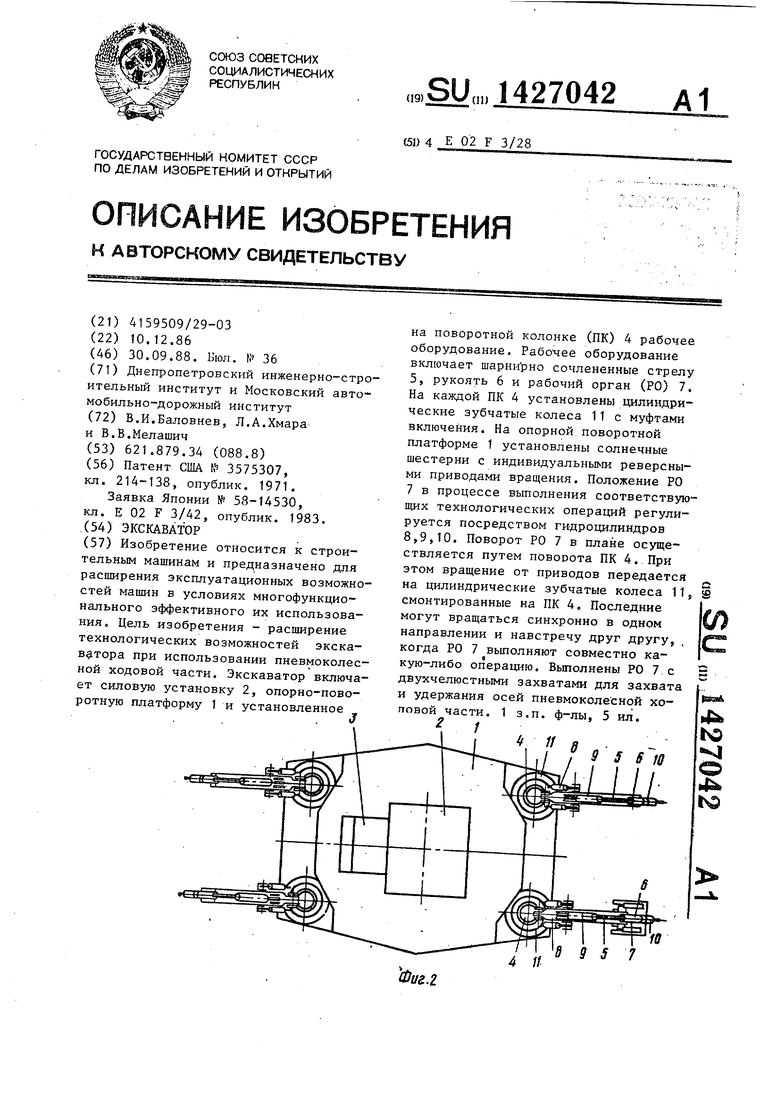
I I
Фиг.;
п
Фил, 3
13
/
| Патент США № 3573307, кл | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| Устройство станционной централизации и блокировочной сигнализации | 1915 |
|
SU1971A1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
