Изобретение относится к измерительной технике и может быть исполь зовано для измерения в пространстве вертикальной составляющей вектора
магнитного поля Земли и намагниченны; - тел, по результатам измерений которых определяют местоположение полезных ископаемых, намагниченных тел и осуществляют контроль качества изготовления изделий из ферромагнитных материалов.
Цель изобретения - повышение той- ности измерения вертикальной составляющей вектора магнитной индукции.
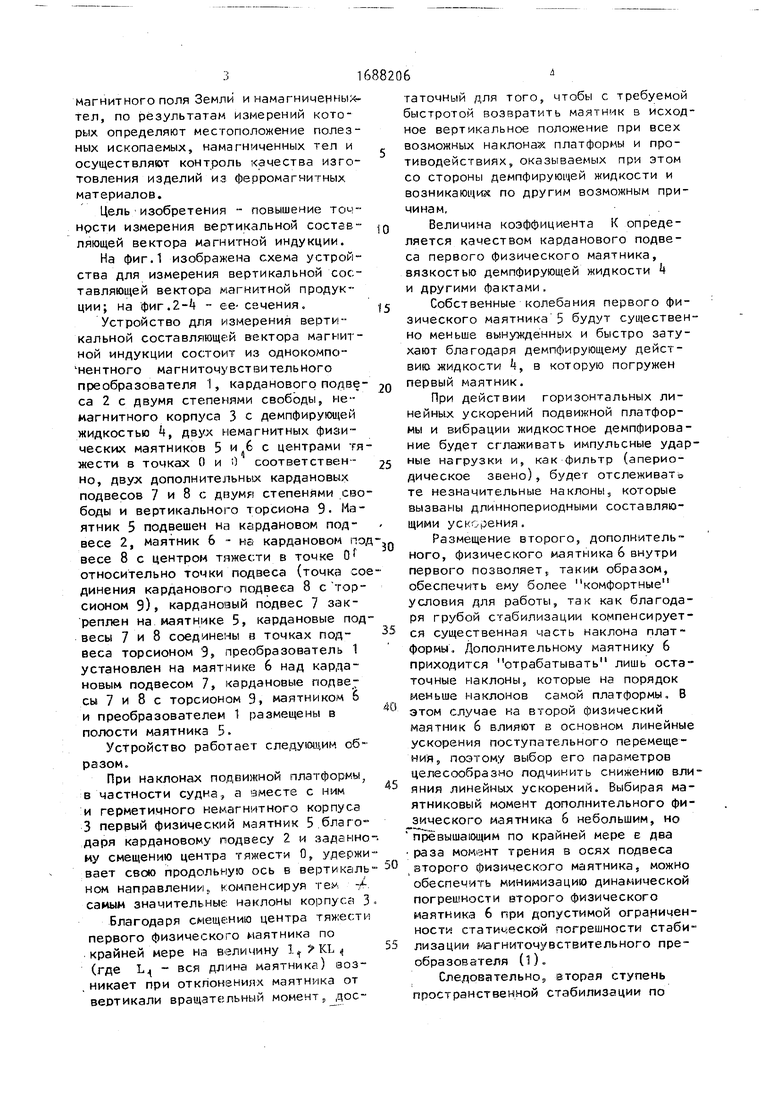
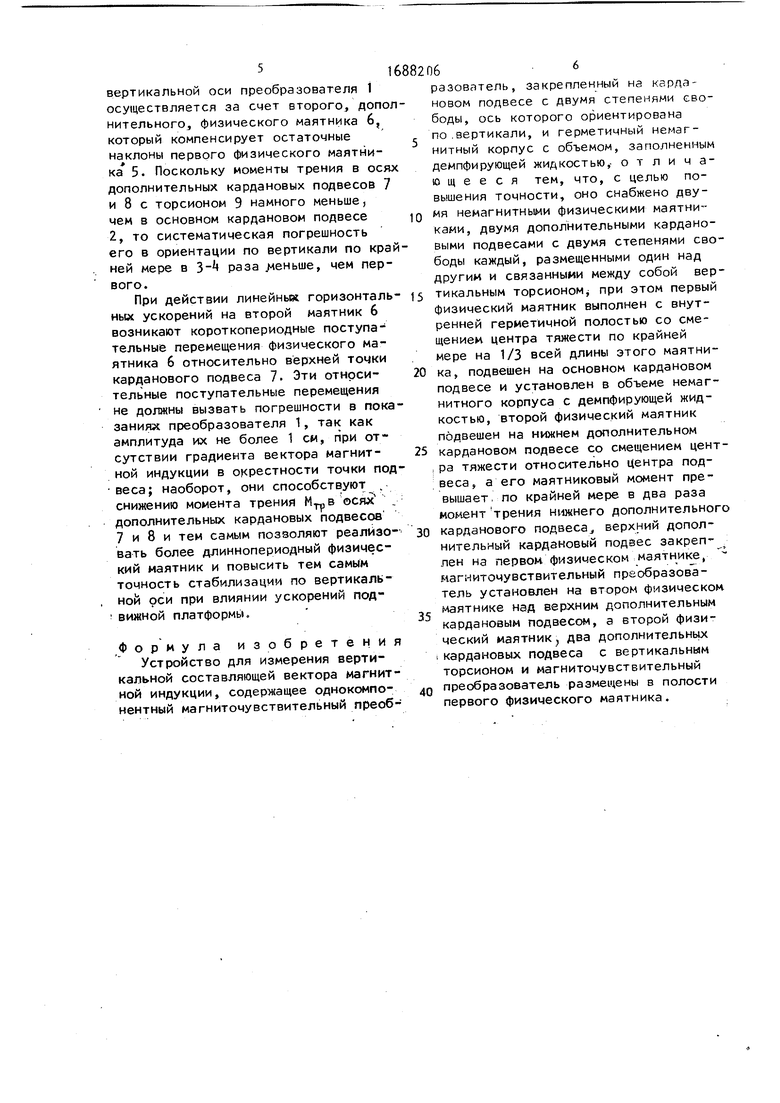
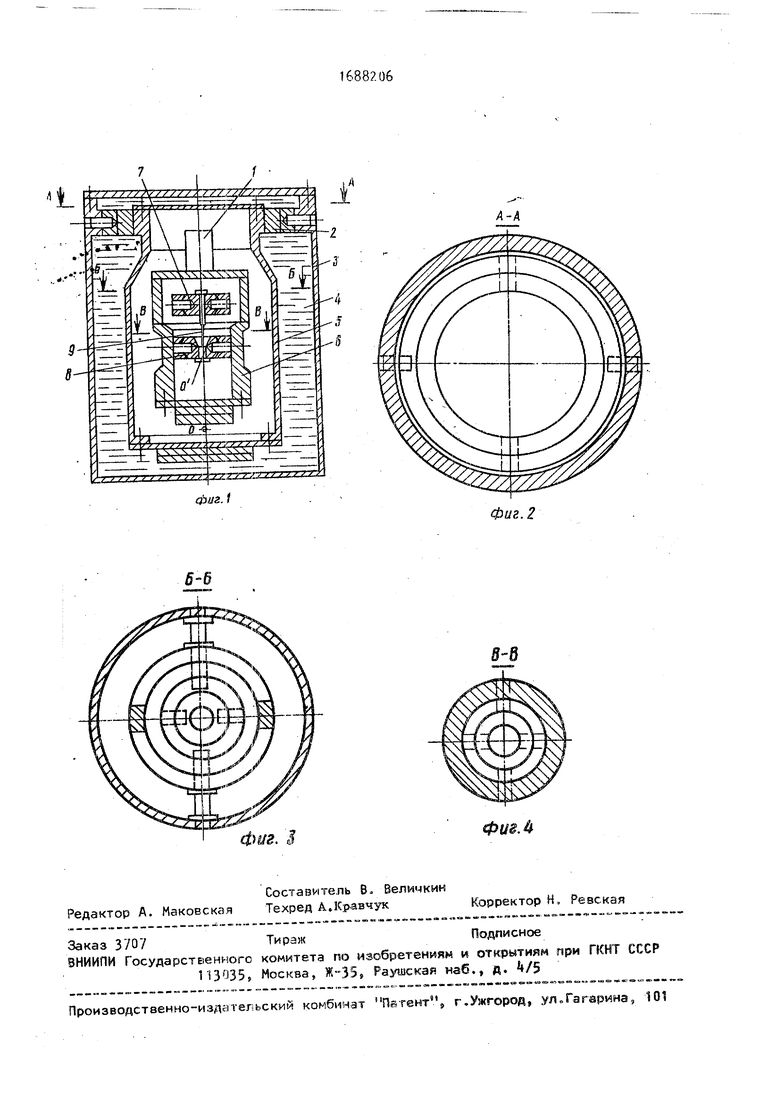
На фиг.1 изображена схема устройства для измерения вертикальной составляющей вектора магнитной продукции; на фиг.2- - ее- сечения.
Устройство для измерения вертикальной составляющей вектора магнитной индукции состоит из однокомпо- нентного магниточуветвительного преобразователя 1, карданового подвеса 2 с двумя степенями свободы, немагнитного корпуса 3 с демпфирующей жидкостью k, двух немагнитных физических маятников 5 и 6 с центрами тяжести в точках 0 и I) соответственно, двух дополнительных кардановых подвесов 7 и 8 с диумя степенями свободы и вертикального торсиона 9- Маятник 5 подвешен н) кардановом подвесе 2, маятник 6 - на кардановом повесе 8 с центром тяжести в точке (К относительно точки подвеса (точка содинения карданового подвеса 8 с тор- сионом 9), карданоиый подвес 7 закреплен на маятнике 5, кардановые подвесы 7 и 8 соединены н точках подвеса торсионом 9 преобразователь 1 установлен на маятнике 6 над карда- новым, подвесом 7, кардановые подвесы 7 и 8 с торсионом Э, маятником 6 и преобразователем 1 размещены в полости маятника 5.
Устройство работает следующим образом.
При наклонах подвижной платформы, в частности судна, а зместе с ним и герметичного немагнитного корпуса 3 первый физический маятник 5 благодаря кардановому подвесу 2 и заданному смещению центра тяжести 0, удерживает свою продольную ось в вертикальном направлении,, номпенсируя теу - самым значительные наклоны корпуса 3
Благодаря смещению центра тяжести первого физического маятника по крайней мере на величину 1,. KL (где L4 - вся длина маятника) возникает при откпонениях маятника от вертикали вращательный момент, достаточный для того, чтобы с требуемой быстротой возвратить маятник в исходное вертикальное положение при всех
возможных наклонах платформы и противодействиях, оказываемых при этом со стороны демпфирующей жидкости и возникающих по другим возможным причинам,
Q Величина коэффициента К определяется качеством карданового подвеса первого физического маятника, вязкостью демпфирующей жидкости и другими фактами.
5 Собственные колебания первого физического маятника 5 будут существенно меньше вынужденных и быстро затухают благодаря демпфирующему действию жидкости , в которую погружен
Q первый маятник.
При действии горизонтальных линейных ускорений подвижной платформы и вибрации жидкостное демпфирование будет сглаживать импульсные удар5 ные нагрузки и, как фильтр (апериодическое звено), будет отслеживат0 те незначительные наклоны, которые вызваны длиннопериодными составляющими ускорения.
Размещение второго, дополнительного, физического маятника 6 внутри первого позволяет, таким образом, обеспечить ему более комфортные условия для работы, так как благодаря грубой стабилизации компенсируется существенная часть наклона платформы. Дополнительному маятнику 6 приходится отрабатывать лишь остаточные наклоны, которые на порядок меньше наклонов самой платформы. В этом случае на второй физический маятник 6 влияют в основном линейные ускорения поступательного перемещения, поэтому выбор его параметров целесообразно подчинить снижению влияния линейных ускорений. Выбирая маятниковый момент дополнительного фи- зического маятника 6 небольшим, но превышающим по крайней мере Е два раза момент трения в осях подвеса второго физического маятника, можно обеспечить минимизацию динамической погрешности второго физического маятника 6 при допустимой ограниченности статической погрешности стаби5 лизации магниточувствительного преобразователя (1).
Следовательно,, вторая ступень пространственной стабилизации по
0
5
0
5
0
вертикальной оси преобразователя 1 осуществляется за счет второго, дополнительного, физического маятника 6, который компенсирует остаточные наклоны первого физического маятника 5. Поскольку моменты трения в осях дополнительных кардановых подвесов 7 и 8 с торсионом 9 намного меньше, чем в основном кардановом подвесе 2, то систематическая погрешность его в ориентации по вертикали по крайней мере в 3-1 раза .меньше, чем первого.
При действии линейных горизонтальных ускорений на второй маятник 6 возникают короткопериодные поступательные перемещения физического маятника 6 относительно верхней точки карданового подвеса 7. Эти относительные поступательные перемещения не должны вызвать погрешности в показаниях преобразователя 1, так как амплитуда их не более 1 см, при отсутствии градиента вектора магнитной индукции в окрестности точки подвеса; наоборот, они способствуют
МтрВ
осях
снижению момента трения дополнительных кардановых подвесов 7 и 8 и тем самым позволяют реализовать более длиннопериодный физический маятник и повысить тем самым точность стабилизации по вертикальной оси при влиянии ускорений подвижной платформы.
Формула изобретения
Устройство для измерения вертикальной составляющей вектора магнитной индукции, содержащее однокомпо- нентный магниточувствительный преоблхй
10
15
20
16882066
разователь, закрепленный на карда- новом подвесе с двумя степенями свободы, ось которого ориентирована по вертикали, и герметичный немагнитный корпус с объемом, заполненным демпфирующей жидкостью,- отличающееся тем, что, с целью повышения точности, оно снабжено двумя немагнитными физическими маятниками, двумя дополнительными кардано- выми подвесами с двумя степенями свободы каждый, размещенными один над другим и связанными между собой вертикальным торсионом, при этом первый физический маятник выполнен с внутренней герметичной полостью со смещением центра тяжести по крайней мере на 1/3 всей длины этого маятника, подвешен на основном кардановом подвесе и установлен в объеме нема)- нитного корпуса с демпфирующей жидкостью, второй физический маятник подвешен на нижнем дополнительном кардановом подвесе со смещением центра тяжести относительно Центра подвеса, а его маятниковый момент превышает, по крайней мере в два раза момент трения нижнего дополнительного карданового подвеса., верхний дополнительный кардановый подвес закреплен на первом физическом маятнике, магниточувствительный преобразователь установлен на втором физическом маятнике над верхним дополнительным кардановым подвесом, а второй физический маятник два дополнительных iкардановых подвеса с вертикальным торсионом и магниточувствительный 40 преобразователь размещены в полости первого физического маятника.
25
30
35
фиг. 1
Изобретение относится к измерительной технике и может быть использовано для измерения в пространстве вертикальной составляющей вектора магнитного поля Земли и намагниченных тел, по результатам измерений которых определяют местоположение полезных ископаемых, намагниченных тел и осуществляют контроль качества изготовления этого изделия. Цель изобретения - повышение точности изме- грения вертикальной составляющей вектора магнитной индукции. Устройство содержит однокомпонентный магнито- чувствительный преобразователь, закрепленный на кардановом подвесе с двумя степенями свободы, герметичный немагнитный корпус с объемом, заполненным демпфирующей жидкостью, два немагнитных физических маятника, два дополнительных кардановых подвеса с двумя степенями свободы каждый, размещенные один под другим и связанные между собой вертикальным- торсионом. Первый физический маятник выполнен с внутренней герметичной полостью со смещением центра тяжести превышающий по крайней мере 1/3 всей длины этого маятника, подвешен на основном кардановом подвесе и установлен в объеме немагнитного корпуса с демпфирующей жидкостью. Второй физический маятник подвешен на нижнем дополнительном кардановом подвесе со смещением центра тяжести относительно подвеса так, что его маятниковый момент превышает по крайней мере в два раза момент трения нижнего дополнительного карданового подвеса. Верхний дополнительный карда- новый подвес закреплен на первом физическом маятнике, магниточувстви- тельный преобразователь установлен - на втором физическом маятнике над верхним дополнительным кардановым подвесом. Второй физический маятник, два дополнительных кардановых подвеса с вертикальным торсионом и магни- точувствительный преобразователь размещены в полости первого физического маятника. Такое исполнение данного устройства обеспечивает повышение точности измерения вертикальной составляющей вектора магнитной индукции. Ц ил. Q 3 (Л О5 00 00 to о о
Фиг. 2
ФиёЛ
| Андриевский Е.А | |||
| Возможность использования магнитного умножителя в &z-магнитометре | |||
| Автоматический контроль и измерительная техника | |||
| Киев: Наукова думка, 1965. |
