1
(2t) 4761897/12 (22)18.10.89 (46)07.11.91. Бюл. №41
(71)Научно-исследовательский институт конструкционных материалов и технологических процессов при МГТУ им. Н.Э.Баумана
(72)В.Т.Рябов, Е.П.Аршук, Ю.П.Замчалов и Ю.В.Утробин
(53)621.382(088.8)
(56)Авторское свидетельство СССР №562883, кл. Н01 L 21/66, 1977.
(54) АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ДИОДОВ
(57)Изобретение относится к электронной промышленности, и может быть использовано для классификации приборов с аксиальными выводами. Цель изобретения - повышение производительности сортировки. Автомат содержит корпус, загрузочное
устройство, ротор поштучной выдачи диодов, рабочий ротор с равномерно расположенными, изолированными друг от друга диододержателями, сортирующее устройство, накопительную тару и электронные блоки измерения и управления. Блок измерения расположен на одном валу с рабочим ротором и соединен выходами непосредственно с диододержателями, получает электропитание через контактирующий механизм и связан с блоком управления через оптический последовательный канал. Сортирующее устройство содержит ротор разгрузки, каждый диододержатель которого снабжен электромагнитным приводом, позволяющим сбрасывать диоды в соответствующие лотки, соединенные с входами вихревых пневмоэжекторов, перемещающих приборы по трубопроводам в накопительную тару. 8 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат классификации диодов | 1975 |
|
SU562883A1 |
| УСТРОЙСТВО СОРТИРОВКИ ОБЪЕКТОВ ПО ВИЗУАЛЬНЫМ ПРИЗНАКАМ | 2010 |
|
RU2424859C1 |
| Автомат для классификации полупроводниковых приборов | 1973 |
|
SU534810A1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ТОВАРНЫХ ПРЕДМЕТОВ | 2018 |
|
RU2672936C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ХРАНЕНИЯ И ВЫДАЧИ БАНКОВСКИХ КАРТ (КАРТОМАТ) | 2017 |
|
RU2672723C1 |
| МНОГОКАНАЛЬНЫЙ РЕНТГЕНОРАДИОМЕТРИЧЕСКИЙ СЕПАРАТОР | 2010 |
|
RU2432206C1 |
| СПОСОБ СОРТИРОВКИ ДОКУМЕНТОВ (ВАРИАНТЫ) | 2005 |
|
RU2344063C2 |
| Автомат для сортировки стержней, покрытых магнитной пленкой | 1972 |
|
SU519232A1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 1991 |
|
RU2042193C1 |
| Автомат по приему пластиковой тары, прессованию и сортировке ее по цвету и пресс для прессования тары | 2022 |
|
RU2796790C1 |


Изобретение относится к электронной промышленности, предназначено для классификации диодов по электрическим пара- метрам и может быть использовано для классификации приборов с аксиальными выводами, например резисторов, на предприятиях, изготавливающих и использующих эти приборы.
Цель - повышение производительности сортировки.
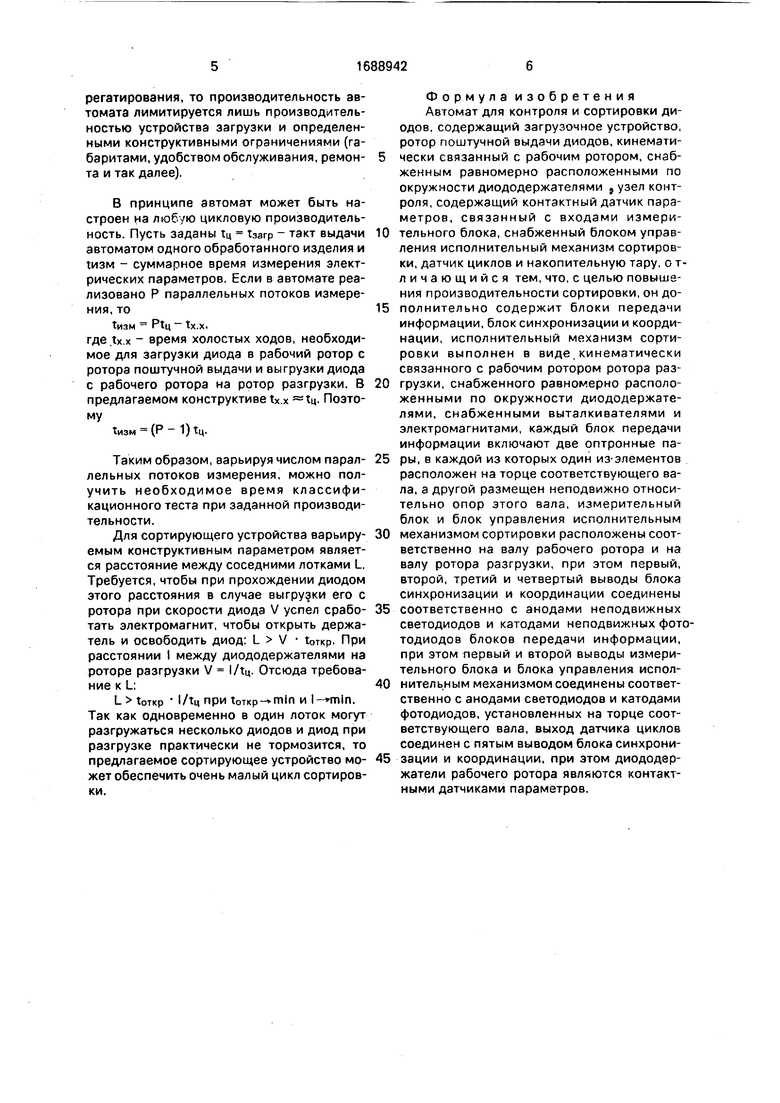
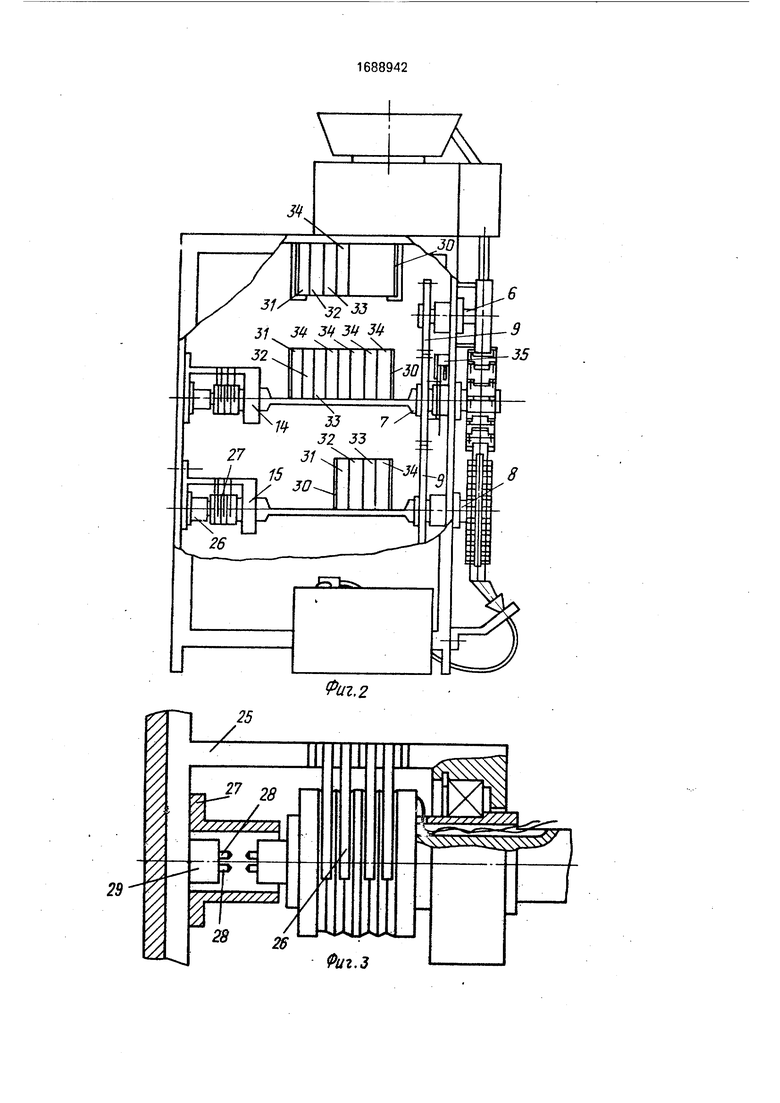
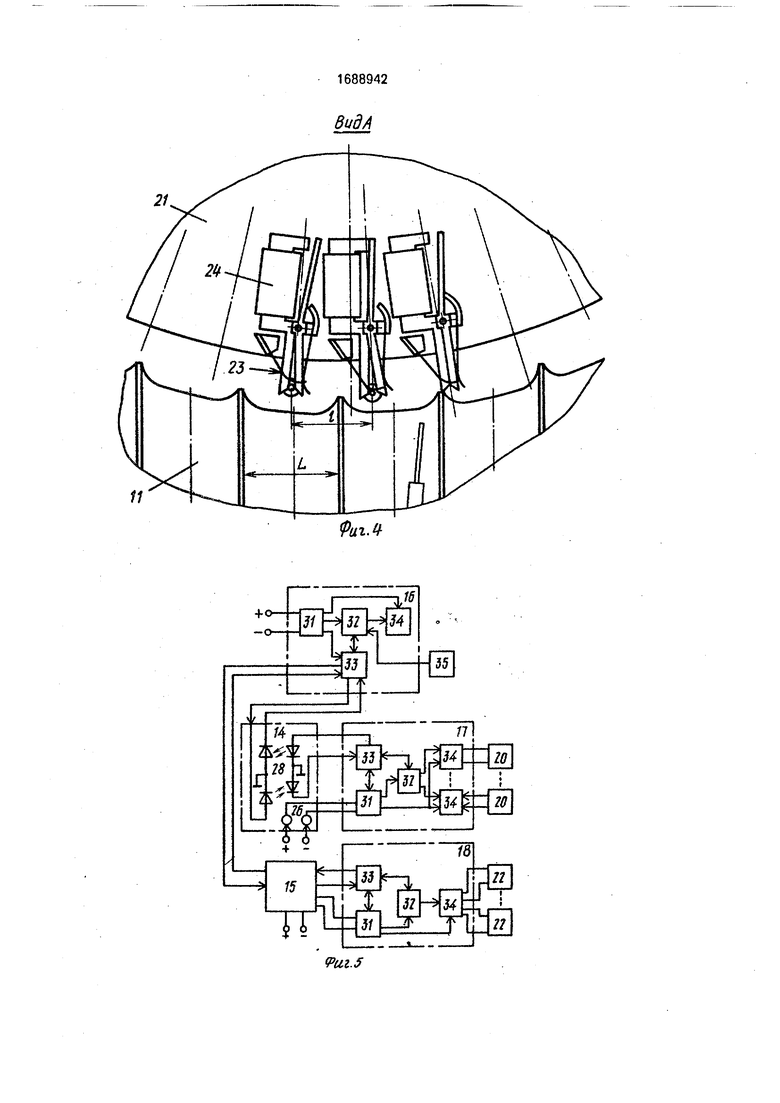
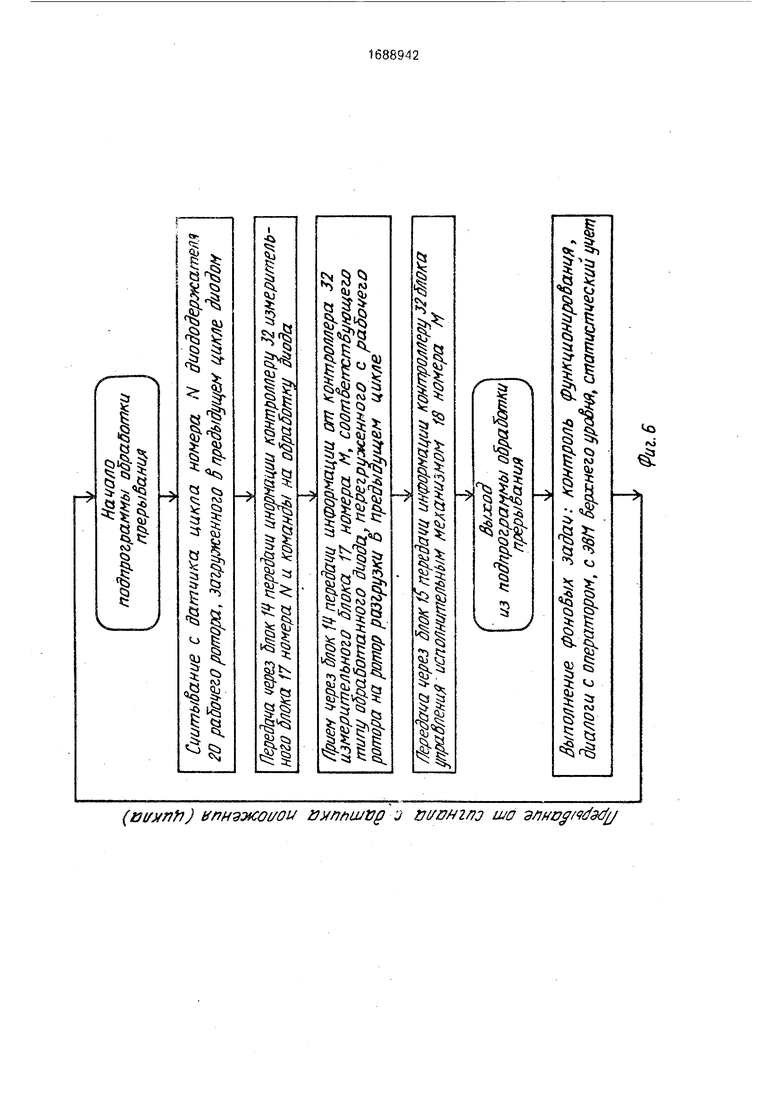
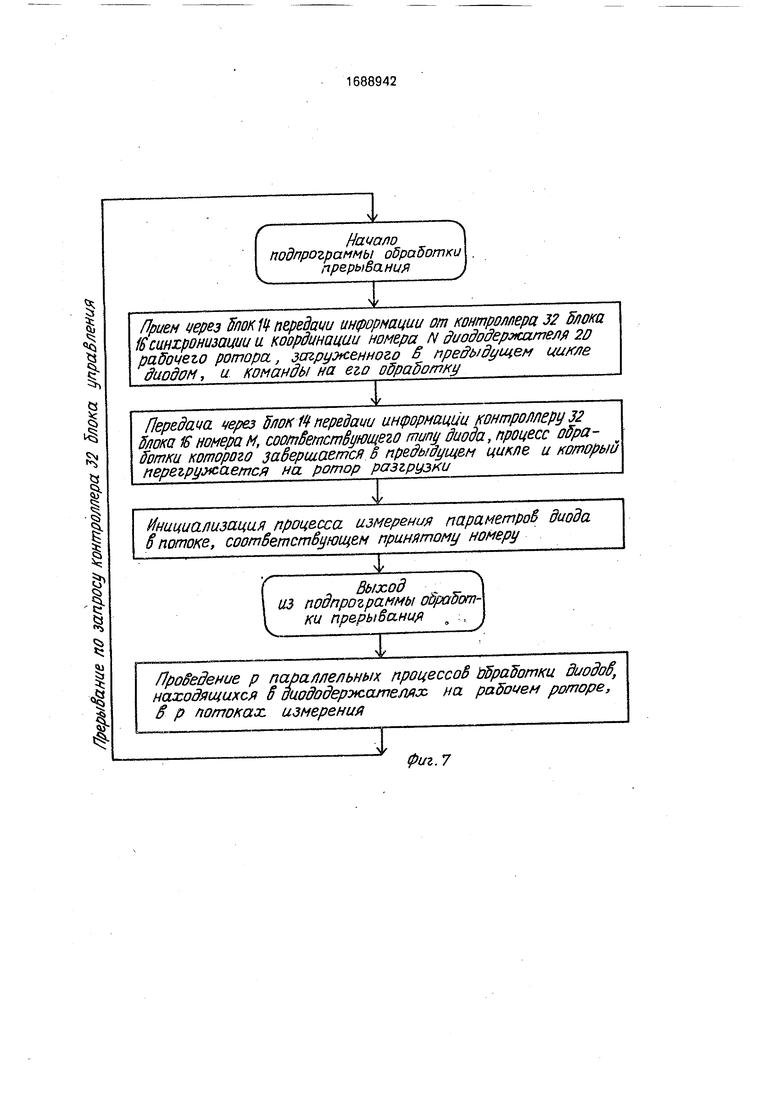
На фиг. 1 дана кинематическая схема предлагаемого автомата; на фиг, 2 - автомат, профильная проекция; на фиг. 3 - блок передачи информации; на фиг. 4 - вид А на фиг. 1; на фиг. 5 - структурная схема системы измерения и управления; на фиг. 6 алгоритм функционирования контроллера блока синхронизации и координации; на фиг. 7 - алгоритм функционирования контроллера измерительного блока; на фиг. 8 - алгоритм функционирования контроллера блока управления исполнительным механизмом.
Автомат состоит из загрузочного устройства 1, установленного на корпусе 2, ротора 3 поштучной выдачи диодов, рабочего ротора 4, ротора 5 разгрузки, закрепленных неподвижно соответственно на валах 6-8, зубчатых колес 9, направляющих 10, лотков 11, вихревых пневмоэжекторов 12, пластмассовых трубопроводов 13, блоков 14 и 15 передачи информации, блока 16 синхрони00 00
о
Јь Ю
зации и координации, измерительного блока 17 и блока управления исполнительным механизмом 18 и накопительной тары 19,
Рабочий ротор 4 состоит из диска с равномерно расположенными, изолированными друг от друга диододержателями 20, состоящими из пар подпружиненных друг к другу контактных планок.
Ротор 5 разгрузки состоит из диска 21 с равномерно расположенными диододержателями 22, состоящими из электромагнитов 24, сердечниками которых являются неподвижные планки, к которым подпружинены подвижные зажимные планки, и выталкивателей 23.
Блок передачи информации состоит из кронштейна 25, контактирующего механизма 26 и оптического последовательного канала, состоящего из защитного кожуха 27 и двух пар светодиод-фотодиод 28, закрепленных на торце вала и основании 29, установленном на корпусе 2.
Каждый электронный блок (16, 17 и 18) состоит из унифицированного корпуса 30 и набора функциональных плат, имеющих единый конструктивный формат и устанавливаемых в корпусе на разъемах, Каждый блок содержит три базовые платы: импульсный источник электропитания блока 31, универсальный технологический контроллер 32, плату 33 формирования сигналов оптической связи.
Кроме того, в электронный блок входит определенный комплект плат сопряжения с объектом 34, который и определяет функциональное назначение каждого блока,
В блок синхронизации и координации могут входить плата контроллера канала последовательной связи с ЭВМ верхнего уровня, плата контроллера пульта управления и индикации, а также другие платы, обеспечивающие различные сервисные функции.
Измерительный блок 17 содержит различные источники тока и формирователи сигналов в зависимости от выполняемых на автомате измерительных тестов, В блок управления исполнительным механизмом 18 входит плата выходных ключей для управления электромагнитом 24,
В автомате имеется датчик 35 цикла, являющийся синхронизирующим элементом при функционировании контроллера 32 и обеспечивающий обратную связь в контуре управления. Это дисковый оптический инкрементный датчик, на выходе которого при повороте рабочего ротора на угол 360°/К, где К - число диододержателей 20, параллельно вырабатываются сигнал прерывания контроллера и число в двоичном
коде, соответствующее номеру диододер- жателя, загружаемого диодом.
Автомат работает следующим образом. Привод обеспечивает равномерное вращение валов 6-8 и соответственно закрепленных на них роторов 3-5 и электронных блоков, получающих низковольтное электропитание через скользящие контакты контактирующих механизмов блоков 14 и 15
0 передачи информации, Диоды, загруженные в устройство 1, ориентируются и подаются к ротору 3 поштучной выдачи диодов, который захватывает их своими ячейками и перегружает в рабочий ротор 4. Во время
5 нахождения диодов в диододержателях 20 рабочего ротора в процессе его непрерывного равномерного вращения происходит замер их электрических параметров. Реуль- таты измерения обрабатываются в измери0 тельном блоке 17 и информация о типе обработанных диодов в коде согласно протоколу обмена стандартного интерфейса ра- диального последовательного (ИРПС, например RS-232C) передается через блок
5 14 в блок 16, который с учетом состояния автомата передает соответствующую управляющую информацию через блок 15 блоку управления исполнительным механизмом 19, Диоды поочередно с помощью направ0 ляющих 10 перегружаются с рабочего ротора 4 на ротор 5 разгрузки. При этом выталкиватели 23 деформируются выводами загружаемых диодов. За счет сил трения диоды удерживаются диододержателями 22 и пе5 ремещаются ротором разгрузки к лоткам 11. При соответствии лотка типу данного диода по команде блока управления исполнительным механизмом 18 электромагнит 24 срабатывает, диододержатель 22 раскрывается
0 и данный диод под действием силы тяжести и выталкивателя 23 выталкивается в этот лоток, где он попадает в воронкообразную струю разреженного воздуха, создаваемую вихревым пневмоэжектором 12, который
5 дополнительно ориентирует диод, засасывает его, ускоряет и перемещает по трубопроводу 13 в накопительную тару 19,
Использование предлагаемого автомата позволяет при высокой общей произво0 дительности и хорошей достоверности проводить разнообразные тесты электрических параметров, требующих повышенные выдержки времени при измерениях и неподвижное, надежное контактирование
5 (дрейф обратного тока, тепловое сопротивление переход-корпус, М-фактор и другие), что улучшает качество классификации приборов. Так как при проектировании рабочего ротора и сортирующего устройства реализованы принципы параллельного агрегатирования, то производительность автомата лимитируется лишь производительностью устройства загрузки и определенными конструктивными ограничениями (габаритами, удобством обслуживания, ремонта и так далее).
В принципе автомат может быть настроен на любую цикловую производительность. Пусть заданы Тц tsarp - такт выдачи автоматом одного обработанного изделия и 1изм - суммарное время измерения электрических параметров, Если в автомате реализовано Р параллельных потоков измерения, то
1изм Ptq - tx.x,
где .tx.x - время холостых ходов, необходимое для загрузки диода в рабочий ротор с ротора поштучной выдачи и выгрузки диода с рабочего ротора на ротор разгрузки. В предлагаемом конструктиве tx.x ii. Поэтому
tu3M (Р - 1) tq.
Таким образом, варьируя числом параллельных потоков измерения, можно получить необходимое время классификационного теста при заданной производительности.
Для сортирующего устройства варьируемым конструктивным параметром является расстояние между соседними лотками L, Требуется, чтобы при прохождении диодом этого расстояния в случае выгрузки его с ротора при скорости диода V успел сработать электромагнит, чтобы открыть держатель и освободить диод: L V Ьткр. При расстоянии I между диододержателями на роторе разгрузки V l/tu. Отсюда требование к L:
L to™ 1/т.ц при т.откр- т1п и . Так как одновременно в один лоток могут разгружаться несколько диодов и диод при разгрузке практически не тормозится, то предлагаемое сортирующее устройство может обеспечить очень малый цикл сортировки.
Формула изобретения Автомат для контроля и сортировки диодов, содержащий загрузочное устройство, ротор поштучной выдачи диодов, кинемэтически связанный с рабочим ротором, снабженным равномерно расположенными по окружности диододержателями , узел контроля, содержащий контактный датчик параметров, связанный с входами измерительного блока, снабженный блоком управления исполнительный механизм сортировки, датчик циклов и накопительную тару, о т- личающийся тем, что, с целью повышения производительности сортировки, он дополнительно содержит блоки передачи информации, блок синхронизации и координации, исполнительный механизм сортировки выполнен в виде.кинематически связанного с рабочим ротором ротора разгрузки, снабженного равномерно расположенными по окружности диододержателями, снабженными выталкивателями и электромагнитами, каждый блок передачи информации включают две оптронные пары, в каждой из которых один из элементов расположен на торце соответствующего вала, а другой размещен неподвижно относительно опор этого вала, измерительный блок и блок управления исполнительным
механизмом сортировки расположены соответственно на валу рабочего ротора и на валу ротора разгрузки, при этом первый, второй, третий и четвертый выводы блока синхронизации и координации соединены
соответственно с анодами неподвижных светодиодов и катодами неподвижных фото- тодиодов блоков передачи информации, при этом первый и второй выводы измерительного блока и блока управления исполнительным механизмом соединены соответственно с анодами светодиодов и катодами фотодиодов, установленных на торце соответствующего вала, выход датчика циклов соединен с пятым выводом блока синхронизации и координации, при этом диододер- жатели рабочего ротора являются контактными датчиками параметров.
I
16
13
Фиг.1
Риг. 2
21
11
Риг.Ц
L is FWhp.Jp
nn-TU-rh i A M4JLf-- .
5
1
V1
i
i i
подпрограммы обработки прерывания
Считывание с датчика цикла номера N диододержателя 20 рабочею ротора, загруженного § предыдущей цикле диодом
Передача через дпок 14 передам инорнации контроллеру 32 измеритель- ного блока 17 номера N и команды на обработку диода
А.
- . - - - . w
Прием через 5лок Щ передачи информации an контроллера 32 измерительного Блока 17 номера М, соответствующего типу обработанного диода, перегруженного с рабочего ротора на ротор разгрузки б предыдущем цикле
i
«4
$
I
I
I
Передала через Вш IS передачи информации контроллеру З2$лока управления исполнительным механизмов f8 номера W
Выход
из подпрограммы оораиотки прерывания
Выполнение ФОНОЁЫХ задай: контроль функционирования, диалоги с оператором, с ЭВМ верхнего уровня, статццпческийучет
Начало
подпрограммы обработки прерывания
А.
w
Выход
из подпрограммы оораиотки прерывания
(Риг. 6
Начало
подпрограммы обработки npepbiBanufl
I
8
I
i
I
I t
v
Прием через ЯпокП передачи информации от контроллера 32 5лока 1G синхронизации и. координации номера /V диододержателя 2D рабочего ротора,, загруженного Ј предыдущем цикле диодом , и команды на ею одра$отку
Передача через ft передачи информации контроллеру 32 S/tOKa 16 номера М, соотйетст&ующего типу диода, процесс обработки которого завершается 8 предыдущем цикле и который перегружается на ротор разгрузки
Инициализация процесса измерения параметров диода § потоке, соответствующем принятому номеру
Выход
из подпрограммы оЬраоот- ки прерывание
Проёедение р параллельных процессов ЬЪраЪотки диодоб, находящихся S оцододержа/пелязь на ра5очем роторе, ё р потокаос. измерений
фиг.7
Начало
подпрограммы обработки прерывания
I
Прием через 5лок (5 передали информации от контроллера J2 5лока 16 синхронизации и координации fб номера М, соответствующею типу диода, загруженного на ротор разгрузки В предыдущем цикле.
Сдёиг очереди описателей разгружаемых диодоВ на позицию J Вправо. Включение ё конец ot/epedt/ на осбод од иёи/ееся
место описателя загруженного диода номера /У
I
i I
Формирование маски состояния входного регистра плоты выходных ключей для управления электромагнитами Ј#: при соответствие аписатепя диода ffea/ занимаемого места Ј очереди- f (включено), при несоответствии- О(бь/клюиено). Количество истатбленнш нену- леёщ Весов дл# мест очереди и их расположение соответствует количеству лотко§ 11, т. е. тит& классификации, и их расположению бдоль пути движения .
Выдача маски состояния 8о Входной регистр плату управления исполнительным мехайизмом 18
i i
4
Выход.
из подпрограммы о5раЬ откц
прерывания
oV
I
Регенерация входного регистра платы 5локаупрабления механизмом 18
I
фиг. 8
