|буегся и большое количество зажимных yciw ройств, что увеличивает габариты трансдортирующего устройства и |снигкает быстродействие, надежность н усложняет конструнг Кию.....
Цель изобретения ч- повышение быстродействия, надежности и упрощения конструкщии автомага.. цель достигается тем, что на конце рычаге сортирующего устройства выполнещ вилки, каждая из которых установлена в вь |резах обоймы, охватьшающей транспортиру гощий ротор.
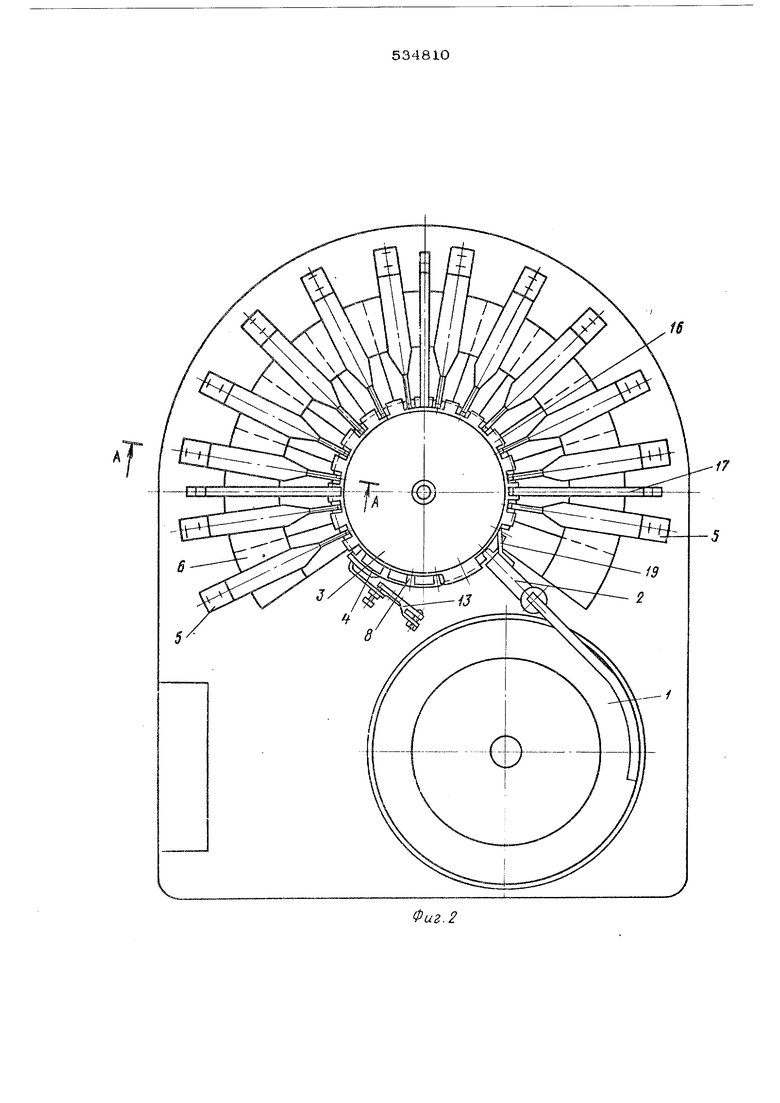
На фиг, 1 схематично изображен предгаагаемый автомат} на фиг, 2 - то же, вид сверху;ч на фиг, 3 - сечение на фиг. .2
Автомат содержит вибробункер 1, лоток 2, гранспортно-под1слючающее устройство, содержащее транспортирующий ротор 3 и контактный механизм 4, измеритель гшраметров, логическое устройство {не показаны), узлы разгрузки 5 сортирующего устройства, блок приемных емкостей 6 и привод 7,
Транспортирующий ротор З, вьтолненны | в виде диска из диэлектрика с пазами 8 по наружному диаметру (чнсую лазов, jianpiiMep20), для загрузки лрнборов жестко закрой лен на выходном &алу привода 7, входной вал которого связан передачей 9 с электродвигателем 1О, В корпусе привода 7 смонч тирован мальтийский механиам с восьмипа аовым крестом, водило которого связанозубчатой передачей через предохранительную муфту с входным валом. Мальтийский крест соединен с выходным валом через зубчдтую передачу с передаточным отношением L 2,5.
Таким образом, за один оборот водила мальтийского механизма транспортирующий ротор поворачивается на 1/2О оборота т.е, на одну позицию. На валу водиж1 мальгнйс кого механиа.ма жестко аакрегкен кулачок 11, ог которого через рычаг 12 и прижим, 13 осуществдается ааждм контактных плао тин механизьш 4, На, том же валу закреплена пластина 14, воздействующая на бесконтактный датчик 15, слуямший для синхронизации работы контактного механиз.чш измерителя и логического устройства,
Транспс тируюший ротор 4 охвачен обой мой 16, иеподвилшо закрепленной с помо«1ИЫО кронштейнов 17 для удержания приборов в пазах ротора при его вращении На разгрузочных П031Ш1ШХ, а их количесг во (нанрагмер, 14) соогветствуег количеству Приемных, емкостей б, в обойме 16 . ся Еырезь 18, через которые прибор «о)кег быть из паза 3. Чадкаждой емкостью, кроме последггей, где для
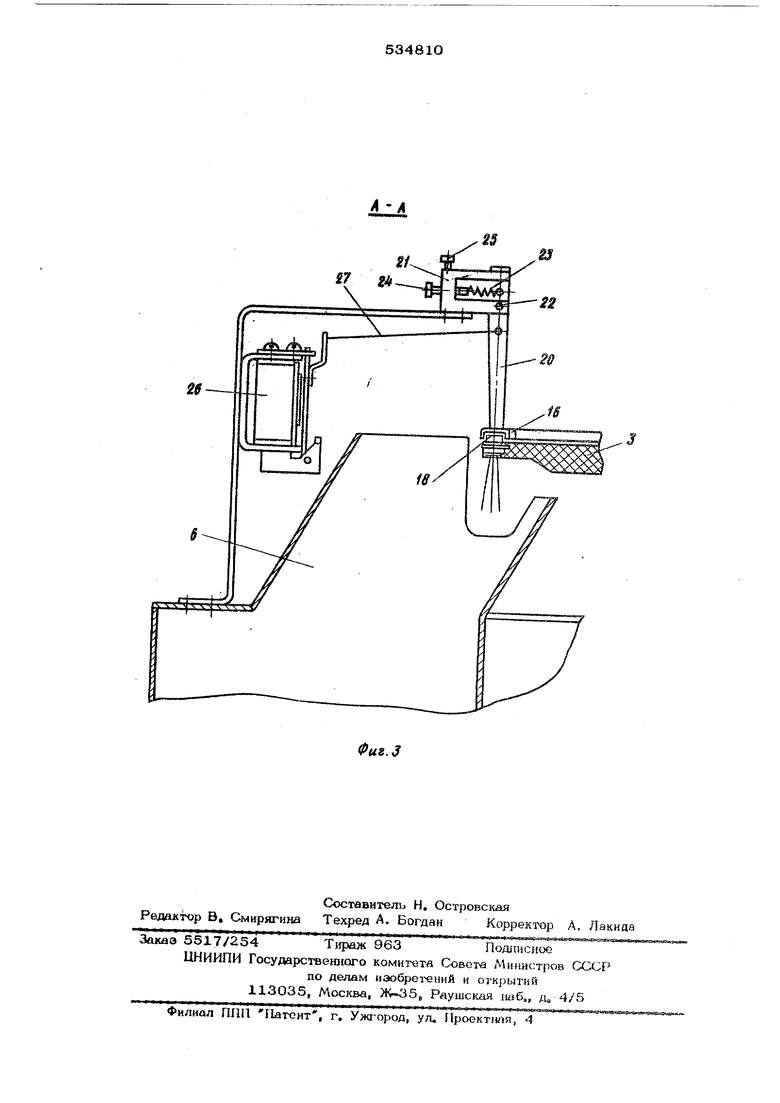
вьигруаки нераабракова1шых при&зров непод вйжно закреплена пластина 19, установлен механизм разгрузки 5,: Рычаг 20 механизма разгрузки 5 щарнирно закреплен в пазу
кронштей1Ш 21 яри оси 22 и удерживается в кско/щом полойШ1 ии пружиной 23, для регулзрфовЕи натяжения которой служат шток 24 н стопорный винт 25, Конец рычага 2О выполнен в виде вилки, которая
омновлена в вырезе обоймы 16 таким об разом, что при вращении ротора 3 корпус 31ри6ора, находящегося в пазу ротора 4, за ЬодагтеЭ в внутрь ее. Привод рычага осу цествляется or электромагнита 26 через
тягу 27, Малая инерционность рычага 2О, также малое усилие и небольшой ход, не« обходимые для вьпруаки прибора, свободно сидящего в па ротора 3, позволяк т применить в качестве привода электромагнит
клапа1шый короткоходовой, oтл Raющийcя высоким быстродействием.
Работает автомат следующим образом. Транзисторы с помощью вибробункера -1 н лотка 2 подаюу-ся , к транспортирующему ротору 3 Во время остановок последнего при совмещении осей паза 8 ротора 3 и лотка 2 полупроводниковый прибор {в данном сл5чае транзистор) заходит в паз 8 ро
тора 3, При следующ 1х поворотах транспор гнруюа его ротора 3 выводы транзистора ав- томат 1ческн заводятся в зазоры между контактными пластинами механизма 4 Jia измерительной поашдии. Кулачок 11 поворачивает рычаг 12, прижим 13 зажимает контакт.ные пластины с расположенными между ни- . ми выводами транзистора,-подключая выво- ды к контактам измерителя. Поело зажима контактных пластин пластина 14 вызывает
сра батьпЕШние датчика 15, импульсом которого включается-измеритель. По окончании измерения кулачок 11 освобождает рычаг 12, при этом прижим 13 отходит от контактно-, го механизма 4, и конгакт 1ые пластины раэжимаются, а транспортирующий ротор 3 поворачивается на шаг, переводя транзистор на первую разгрузочную позицию. Причем транзистор заводится внутрь емкости через рырез в ее боковой стенке. Если параметрь
транзистора соответствуют классификационной группе, выгруншек 0й в первую емкость,, то по команде логического устройства вклк чается электромагнит первого узла разхруз-ки, и транзистор сбрасывается в емкость,
Если по своим параметрам транзистор соот Ьетствует классификационной группе, раэ руншемой на второй или последующей позиции разгрузкнв то логическое устройство включит соогвогсгвующнй электромагнит в
то время, когда прибор будет подведен на
jiipeeiyeMyra разгрузочную поащщпо, Даким рфааом, транзистор последовательно цроkoAHT БС8 поаидин выгрузка, аа которых Гсфасывается в одну из приемных емкостей ;|б по команде от логического ус ройсгва, 1Нера0факоБаш1ые приборы отсутствия :контактировашя1{ непопадание вывода или попадание двух вьшодов водин зазор межд контактными пластинами и т) разгружа ются в последнюю, в данном случае четыр надиатую) емкость 6 пластиной 19,
Конструкция предлагаемого автомата; ot личается высокой проиаводательностью, где быстродействие сортирующего устройства (скорость разгрузка приборов в ем1сости) равно быстродействию электромагнита, так как корпус прибора, находящегося в пазу транспортирующего ротора и удерживаемого; обоймой, охватывающей ротор, при повороте ротора внутрь вилки рычага, и, таким образом, прибор сбрасывается в емкость непосредственно злeктpo aгнитoм no-j средством рычага,
Применение обоймь, охватывающей Tpai-i- спортирующий ротор, и вилок на кошщх рь{ чагов вместо зажимных устройств значительно повышает надежл{ость работы аБ1Рок4ага в упрощает его конструкцнЮв
Формула изобретений
Автомат для классификации но-лупроводнз- жовьк приборов, содержащий загруаочнова :|транспортно«11одключающее устройсгБа| иамИ|ритель параметров, логическое ус-гройство, (устройство сортировки в виде качающихся уьршго& с электромагнитным приводом, ;о т л и ч а ю щ и и с я тем, что, с. кв :|Лью повышеиш быстродействия, надежности и упрощения ©го конструкции, на конце ка-« чающихся рычагов устройства сортировки зыполнены вилки, 1шж.аая из которых установлена в вырезах обоймы, охватьгоающей транспортирующий ротор транспортно-подключающего устройства.
Источники информации, принятые во вни мание при экспертизе:
IB Электронная гехни1ш сер. 12, |197О г, вып, 2, стр. 94-108,
2, Оборудование для производства полуь проводниковых, диодов и триодов под ред. Масленникова П. И, 1970 г., стр. ,132, рис. .. ,
Фиг. 2
Фиъ.З

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический классификатор транзисторов | 1975 |
|
SU557436A1 |
| Контактное устройство для подключения полупроводниковых приборов | 1972 |
|
SU545019A1 |
| Автомат для разбраковки полупроводниковых приборов | 1975 |
|
SU561234A1 |
| Устройство для сортировки полупроводниковых приборов | 1981 |
|
SU983834A1 |
| Устройство для контроля и сортировки полупроводниковых приборов с гибкими выводами | 1976 |
|
SU752838A1 |
| Устройство для автоматической разбраковки радиодеталей с гибкими выводами | 1980 |
|
SU894822A1 |
| Автомат для классификации полупроводниковых приборов | 1980 |
|
SU951485A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Устройство для механических испытаний и разбраковки полупроводниковых приборов | 1979 |
|
SU911655A1 |
| Устройство для контроля и разбраковкиРАдиОэлЕМЕНТОВ | 1979 |
|
SU805451A1 |