(54) АВТОМАТ КЛАССИФИКАЦИИ ДИОДОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля и сортировки диодов | 1989 |
|
SU1688942A1 |
| Устройство для контроля и сортировки радиодеталей преимущественно с осевыми выводами | 1981 |
|
SU1001533A1 |
| СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1991 |
|
RU2024333C1 |
| Автомат для контроля и сортировки герконов | 1989 |
|
SU1772835A1 |
| Автомат для классификации полупроводниковых приборов | 1973 |
|
SU534810A1 |
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| Устройство для сортировки полупроводниковых приборов | 1982 |
|
SU1051625A1 |
| Устройство для сортировки полупроводниковых приборов по электрическим параметрам | 1980 |
|
SU1014072A1 |
| Устройство для сортировки плодов | 1976 |
|
SU612724A1 |
| Роторно-конвейерная машина | 1986 |
|
SU1650273A1 |
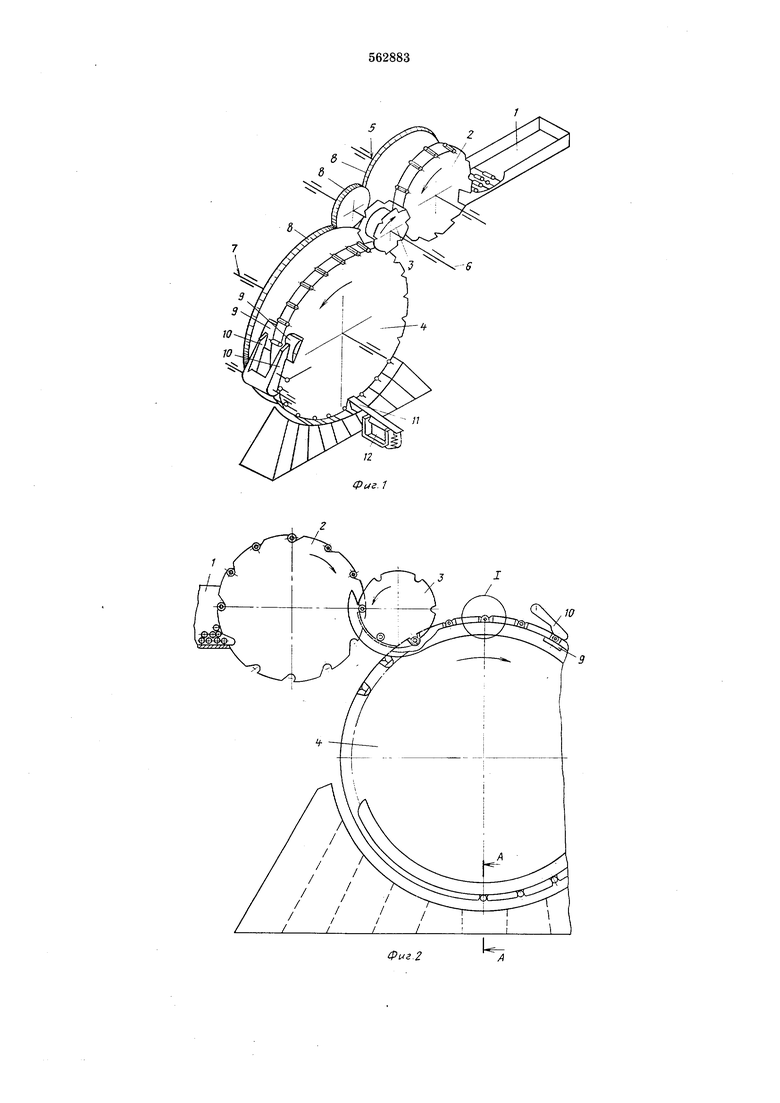
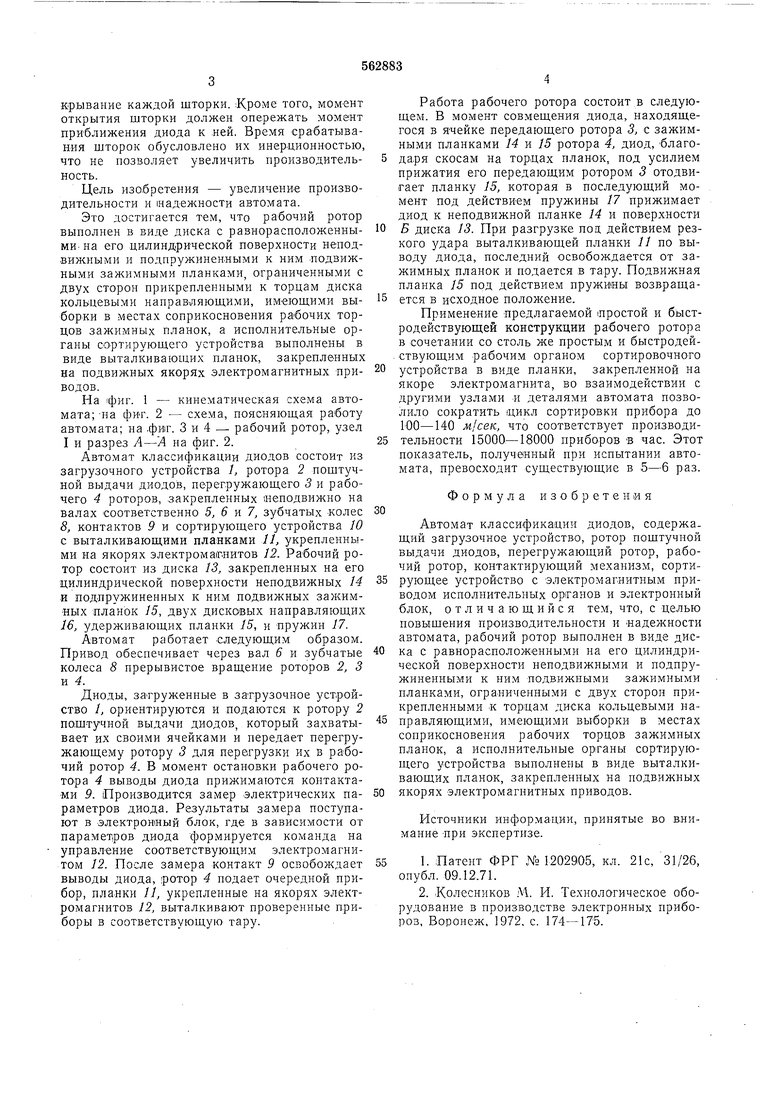
Изобретение относится к электронной промышленности и предназначено для классификации диодов по электрическим параметрам. Оно может быть использовадо для классификации приборов с аксиальными выводами, например резисторов, на предприятиях, изготавливающих и использующих эти приборы 1. Известен автоматический классификатор диодов, состоящий из загрузочного устройства, ротора для поштучной выдачи диодов, контактирующего механизма, электронного блока, сортирующего механизма, рабоч его ротора, с помощью которого производится сортировка диодов. Однако этот автоматический классификатор диодов имеет низкую производительность и малую надежность магнитных держателей. Известен также автомат сортировки диодов по стабильности обратных токов, являющийся наиболее близким по конструктивному рещению и назначению, включающий загрузочное устройство, ротор поштучной выдачи диодов, перегружающий ротор, рабочий ротор, контактирующий механизм, сортирующее устройство с электромагнитным приводом исполнительных орга-нов и электронный ;блок 2. Все роторы связа-ны между собой зубчатыми колесами и получают вращение от электродвигателя через клинореМСнную передачу и два редуктора. Рабочий ротор оснащен держателями диодов, изолированными друг от друга, связанными с электронным блоком. Раскрываются зажимы диододержателей кулачком, охватывающим зону разгрузки и загрузки. Блок сортировки состоит из лотков, на входе которых установлены щторки, перемещающиеся от электромагнитов по команде электронного блока и направляющие сортируемые диоды в соответствующую тару. Недостаток данной конструкции состоит в сложности рабочего ротора и сортирующего устройства, в их инерционности и, как следствие, в низкой производительности и надежности. Сложность и невысокая надежность конструкции ротора заключаются в том, что он содержит 72 изолированных диододержателя (состоят из двух пар зажимов осей, рычагов и др. деталей), связанных посредством скользящих контактов с электронным блоком. Конструкция блока сортировки, выполненного в виде лотков с вмонтированными шторками и открывающими их электромагнитами, сложна и обладает большой инерционностью. Производительность автомата ограничена временем, необходимым для разгрузки каждого прибора из рабочего ротора. Это время состоит из времени свободного падения диода от держателя до шторки (время тем больше, чем дальще расположена шторка от рабочего ротора) и времени, необходимого на открывание и закрывание каждой шторки. Кроме того, момент открытия шторки должен опережать момент приближения диода к лей. Время срабатывания шторок обусловлено их инердионностыо, что не позволяет увеличить производительность. Цель изобретения - увеличение производительности и надежности автомата. Это достигается тем, что рабочий ротор выполнен в виде диска с равнорасположенными- на его цилиндрической поверхности неподвижными и подпружиненными к ним .подвижными зажимными планками, ограниченными с двух сторон прикрепленными к торцам диска кольцевыми направ-ляющими, имеющими выборки в местах соприкосновения рабочих торцов зажимных планок, а исполнительные органы сортируюш,его устройства выполнены в виде выталкивающих планок, закрепленных на подвижных якорях электромагнитных приводов. На фиг. 1 - кинематическая схема автомата; -на фИГ. 2 - схема, пояс.няюш,ая работу автомата; на ,фи1Г. 3 и 4 - рабочий ротор, узел I и разрез на фиг. 2. Автомат классификации диодов состоит из загрузочного устройства 1, ротора 2 поштучной выдачи диодов, перегружающего 3 и рабочего 4 роторов, закрепленных неподвижно на валах соответственно 5, 6 н 7, зубчатых колес 8, контактов 9 и сортирующего устройства 10 с выталкивающими планками 11, укрепленнымн на якорях электромагнитов 12. Рабочий ротор состоит из диска 13, закрепленных на его цилиндрической поверхности неподвижных 14 и подпружиненных к ним подвижных зажимных планок 15, двух дисковых направляющих 16, удерживающих планки 15, и пружин 17. Автомат работает следующим образом. Привод обеспечивает через вал 6 и зубчатые колеса 8 прерывистое вращение роторов 2, 3 и 4. Диоды, загруженные в загрузочное устройство 1, ориентируются и подаются к ротору 2 поштучной выдачи диодов, который захватывает их своими ячейками и передает перегружающему ротору 3 для перегрузки их в рабочий ротор 4. В момент остановки рабочего ротора 4 выводы диода прижимаются контактами 9. Производится замер электрических параметров днода. Результаты замера поступают в электронный блок, где в зависимости от парамет.ров днода формируется команда на управление соответствующим электромагнитом 12. После замера контакт 9 освобождает выводы днода, ротор 4 нодает очередной прибор, планки /, укрепленные на якорях электромагнитов 12, выталкивают проверенные приборы в соответствующую тару. Работа рабочего ротора состоит в следующем. В момент совмещения диода, находящегося в ячейке передающего ротора 5, с зажимными планками 14 и 15 ротора 4, диод, благодаря скосам на торцах планок, под усилием прижатия его передающим ротором 3 отодвигает планку 15, которая в последующий момент под действием пружины 17 прижимает диод к неподвижной планке 14 и поверхности Б диска 13. При разгрузке под действием резкого удара выталкивающей планки 11 по выводу диода, последний освобождается от зажимных планок и подается в тару. Подвижная планка 15 под действием пружины возвращается в исходное положение. Применение предлагаемой лростой и быстродействующей конструкции рабочего ротора в сочетании со столь же простым и быстродействующим рабочим органом сортировочного устройства в виде планки, закрепленной на якоре электромагнита, во взаимодействии с другими узлами и деталями автомата позволило сократить 1ЦИКЛ сортировки прибора до ЮО-140 м/сек, что соответствует производительности 15000-18000 приборов в час. Этот показатель, полученный при испытании автомата, превосходит существующие в 5-6 раз. Формула изобретения Автомат классификации диодов, содержащий загрузочное устройство, ротор пощтучной выдачи диодов, перегружающий ротор, рабочий ротор, контактирующий механизм, сортирующее устройство с электромагнитным приводом исполнительных органов и электронный блок, отличающийся тем, что, с целью повышения производительности и надежности автомата, рабочий ротор выполнен в виде диска с равнорасположенными на его цилиндрической поверхности неподвижными и подпружиненными к ним подвижными зажимными планками, ограниченными с двух сторон прикрепленными « торцам диска кольцевыми направляющими, имеющими выборки в местах соприкосновения рабочих торцов зажимных планок, а исполнительные сортирующего устройства выполнены в виде выталкивающих планок, закрепленных на подвижных якорях электромагнитных приводов. Источники информации, принятые во внимание при экспертизе. 1.Патент ФРГ №1202905, кл. 21с, 31/26, опубл. 09.12.71. 2.Колесников М. И. Технологическое оборудование в производстве электронных приборов, Воронеж, 1972, с. 174-175.
J
10
15 15
Узел
Б l
IS
W
ФигЛ
