Фиг.
Изобретение относится к робототехнике, а более конкретно к приводам линейного перемещения исполнительного органа манипулятора.
Целью изобретения является уменьшение габаритов.
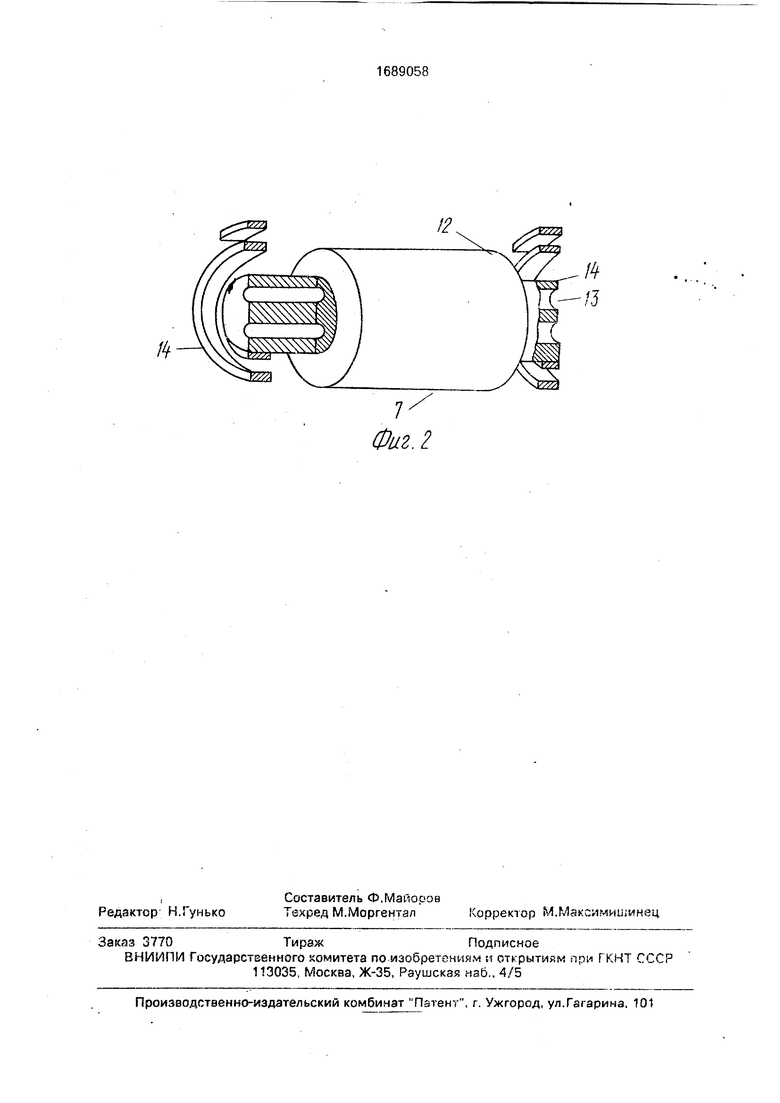
На фиг. 1 изображен привод линейного перемещения, общий вид; на фиг.2-клапан устройств фиксации направляющих элементов,. .
Привод линейного перемещения содержит аксиально расположенные электромагниты 1, каждый из которых состоит из двух катушек 2 и 3 различного диаметра, жестко связанных между собой. При эгом катушка 2 имеет больший диаметр и в ней выполнено центральное отверстие 4, в которое может свободно входить ка гушка 3 соседнего элек- тромагнита. Все электромагниты 1 установлены на направляющих элементах, выполненных в виде телескопических втулок 5 с упорами 6, которые ограничивают перемещение вгулок 5 и плотно прилегают к внутренним стенкам этих втулок, образуя герметичные полости.
Кроме того, привод содержит устройство фиксации положения втулок 5 и связанных с ними электромагнитов, которое содержит расположенную в корпусе привода камеру, разделенную на две части 7 и 8 эластичной перегородкой 9, при этом часть 7 сообщается с атмосферой, а часть 8 заполнена рабочей средой и через каналы 10 с клапаном 11 сообщается внутренней полостью втулок 5. Клапан 11 выполнен в виде электродвигателя с ограниченным углом поворота ротора 12, в котором выполнены сквозные отверстия 13, совпадающие с отверстиями канала 10 в одном из крайних положений ротора 12. Ограничение угла поворота ротора обеспечивается за счет устг- новки пружин 14, служащих для возврата
ротора в исходное положение при отключении двигателя.
Привод работает следующим образом. Для осуществления взаимного перемещения смежных электромагнитов их обращенные друг к другу катушки 2 и 3 подключаются к источнику электрической энергии таким образом, что создаваемые ими магнитные потоки направлены так, что возпикающие в результате их взаимодействия усилия обеспечивают им необходимое перемещение. При этом ротор 12 клапана 11 находится в положении, при котором через него происходит перемещение рабочей среды между частью 8 камеры и полостью втулок 5. После окончания перемещения электромагнитов ротор 12 поворачивается, перекрывая канал 10 и фиксируя гем самым положение электромагнитов.
Формула изобретения
Привод линейного перемещения, преимущественно для манипуляторов, содержащий установленные на корпусе направляющие элементы, выполненные в виде телескопических втулок с упорами, устройство фиксации положения направляющих элементов, имеющее управляемый клапан для перепускания рабочей среды, и расположенные аксиально электромагниты, жестко
связанные с соответствующими направляющими элементами, отличающийся тем, что, с целью уменьшения габаритов, устройство фиксации положения направляющих элементов выполнено в виде расположенной в корпусе привода камеры, разделенной эластичной перегородкой на две части, одна из которых сообщается с атмосферой, а другая часть заполнена рабочей средой и сообщается с внутренней полостью теле0 f конических втулок через дополнительно выполненный в корпусе канал, в котооом установлен управляемый клапан.
/4 J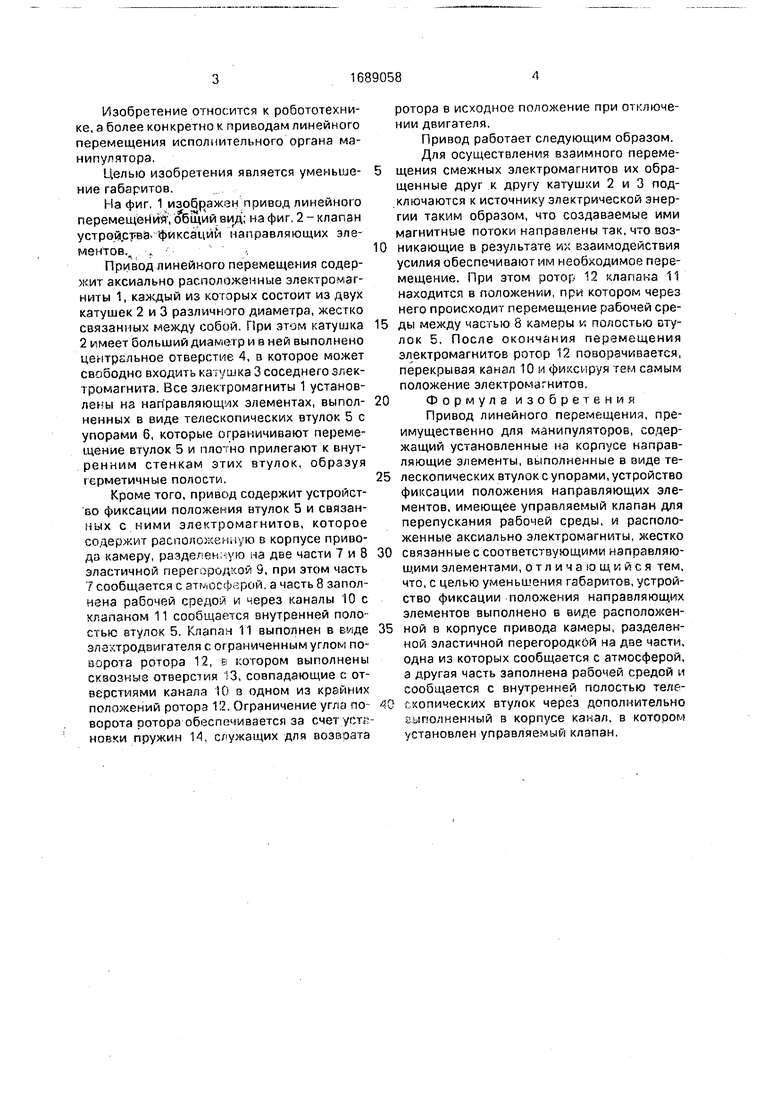
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод линейного перемещения | 1988 |
|
SU1516343A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Манипулятор | 1987 |
|
SU1547198A1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| АППАРАТ ДЛЯ ПРИГОТОВЛЕНИЯ СТЕРИЛЬНЫХ МАЗЕЙ | 2000 |
|
RU2183952C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| ПОГРУЖНОЙ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2549381C1 |
| РУЧНОЕ УСТРОЙСТВО ДЛЯ ВЫПУСКА СРЕД | 1990 |
|
RU2032482C1 |
| СЕМИСЕКЦИОННЫЙ ПОГРУЖНОЙ БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ | 2022 |
|
RU2812561C1 |
Изобретение относится к робототехнике, а более конкретно к приводам линейного перемещения исполнительного органа манипулятора. Целью изобретения является уменьшение габаритов Работа привода осуществляется при подключении к источнику электрической энергии обращенных друг к другу катушек 2 и 3 смежных электро магнитов, при этом клапан 11,представляющий собой электродвигатель, в роторе которого выполнены сквозные отверстия, обеспечивает перетекание рабочей среды из части 8 камеры, расположенной в корпусе привода, и внутренними полостями втулок 5, являющихся направляющими элементами. Фиксация положений электромагнитов осуществляется перекрытием каналов 10, происходящим при повороте ротора клапана 11 2 ил.
| Привод линейного перемещения | 1988 |
|
SU1516343A1 |
