Изобретение относится к робото- технике и касается устройств транспортных манипуляторов, предназначенных для захвата и перемещения 5 пластин больших и сверхбольших интегральных схем в вакууме или иной контролируемой технологической среде .
Цель изобретения - повышение на- 10 дежности и КПД манипулятора за счет исключения пар трения в герметизированном пространстве при одновременном устранении аварийных ситуаций за счет исключения разжатия зажимно- 15 го устройства при отключении энергопитания .
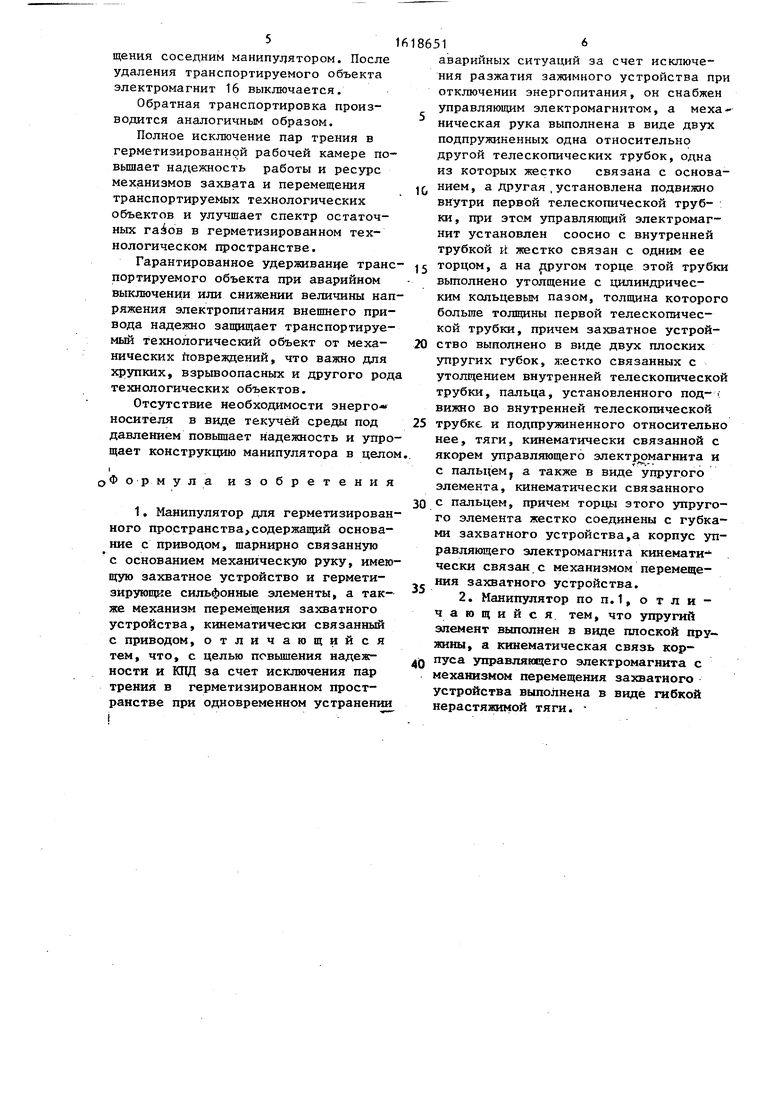
На фиг.1 представлен манипулятор, общий вид; на фиг.2 - механизм перемещения захватного устройства; на 20 фиг.З - разрез А-А на фиг.2.
Манипулятор выполне н в виде закрепленных на основании 1 неподвижной и подвижной телескопических трубок 2 и 3, взаимно подпружиненных в акси- 25 альном направлении и герметизированных относительно окружающего их техологического пространства посредством пружин 4 и сильфона 5.
Нижний (по чертежу) конец внутрен- }0 ней подвижной телескопической трубки 3 имеет утолщение, в котором выполнен цилиндрический паз 6 кольцевого сечения, внешний диаметр которого больше внешнего диаметра неподвижной 35 телескопической трубки 2.
. На внешней стороне утолщения труб ки 3 закреплены плоские упругие губ- ки 7, на свободных концах которых имеются захватные губки 8, причем эти 40 упругие элементы связаны гибким элементом 9... например плоской пружиной i или струной, с которым взаимодействует кулачок 10, укрепленный на пальце 1, соосно установленном внутри под- 45 вижной телескопической трубки 3, аксиально подпружиненным относительно нее и герметично-подвижно соединенным с нею посредством пружины 12 и сильфона 13.50
Палец 11 посредством стержня (или струны) 14 механически связан с якорем 15 управляющего электромагнита 16, укрепленного на противоположном (верхнем по чертежу) конце подвижной - телескопической трубки 3.
Верхний конец подвижной трубки 3 с укрепленным на нем электромагнитом 16 взаимодействует посредством гибкой связи 17, выполненной, например, в виде двух тросиков или струн, закрепленных концами на корпусе электромагнита 16 и на двух идентичных рабочих шкивах 18 с реверсивным электродвигателем 19, причем шкивы 18 укреплены вместе с червячным зубчатым колесом редуктора 20 на общей оси. Электродвигатель 19 соосно установлен на корпусе 21, закрепленном на основании 1 о
В исходном положении манипулятора управляющий электромагнит 16 выключен, захватные губки 8 приближены одна к другой под действием пружины 12 и кулачка 10 на гибкий элемент 9, при этом верхняя часть подвижной телескопической трубки 3 вместе с укреплена ным на ней управляющим электромагни - том 16 находится в крайнем верхнем (на фиг.1 показано пунктиром) положении .
Для захвата и перемещения транспортируемого объекта (например, плавающего захвата с укрепленной в нем полупроводниковой пластиной) включается управляющий электромагнит 16, в результате чего захватные губки 8 расходятся, а включаемый затем реверсивный электродвигатель 19 посредством червячного редуктора 20, гибкой связи 17 и пружины 4 переводит подвижную телескопическую трубку 3 в противоположное исходному крайнее нижнее положение, после чего уп равляющий электромагнит 16 выключается, в результате этого захватные губки 8 зажимают сферический элемент хвостовика плавающего захвата, далее реверсивный двигатель 19 вновь включается, но в обратном направлении, благодаря чему подвижная телескопическая трубка 3 возвращается в исходное положение, перенося таким образом транспортируемый объект (плавающий захват) в новое положение.
В новом положении плавающий захват остается до тех пор, пока к нему не приблизится и не захватит его с помощью двух других (свободных) сферических элементов, имеющихся на его хвостовике, соседний аналогичныйманипулятор, работающий в плоскости, ортогональной той, в которой работает манипулятор, после чего управляющий электромагнит 16 вновь включается, освобождая транспортируемый объект для дальнейшего переме5Ifi
щения соседним манипулятором. После удаления транспортируемого объекта электромагнит 16 выключается.
Обратная транспортировка производится аналогичным образом.
Полное исключение пар трения в герметизированной рабочей камере повышает надежность работы и ресурс механизмов захвата и перемещения транспортируемых технологических объектов и улучшает спектр остаточных в герметизированном технологическом пространстве.
Гарантированное удерживание транспортируемого объекта при аварийном выключении или снижении величины напряжения электропитания внешнего привода надежно защищает транспортируемый технологический объект от механических повреждений, что важно для хрупких, взрывоопасных и другого рода технологических объектов.
Отсутствие необходимости энерго носителя в виде текучей среды под давлением повышает надежность и упрощает конструкцию манипулятора в целом.
i .Формула изобретения
1. Манипулятор для герметизированного пространства,содержащий основание с приводом, шарнирно связанную с основанием механическую руку, имеющую захватное устройство и герметизирующие сильфонные элементы, а также механизм перемещения захватного устройства, кинематически связанный с приводом, отличающийся тем, что, с целью повышения надежности и КПД за счет исключения пар трения в герметизированном пространстве при одновременном устранении
186516
аварийных ситуаций за счет исключения разжатия зажимного устройства при отключении энергопитания, он снабжен управляющим электромагнитом, а механическая рука выполнена в виде двух подпружиненных одна относительно другой телескопических трубок, одна из которых жестко связана с основа
нием, а другая, установлена подвижно внутри первой телескопической трубки, при этом управляющий электромагнит установлен соосно с внутренней трубкой и жестко связан с одним ее
торцом, а на другом торце этой трубки выполнено утолщение с цилиндрическим кольцевым пазом, толщина которого больше толщины первой телескопической трубки, причем захватное устройство выполнено в виде двух плоских упругих губок, жестко связанных с утолщением внутренней телескопической трубки, пальца, установленного под--: вижно во внутренней телескопической
трубке и подпружиненного относительно нее, тяги, кинематически связанной с якорем управляющего электромагнита и с пальцемj а также в виде упругого элемента, кинематически связанного с пальцем, причем торцы этого упругого элемента жестко соединены с губками захватного устройства,а корпус управляющего электромагнита кинемати- чески связан с механизмом перемещения захватного устройства.
2. Манипулятор по п.1, о т л и - чающийся тем, что упругий элемент выполнен в виде плоской пру жины, а кинематическая связь корпуса управляющего электромагнита с механизмом перемещения захватного устройства выполнена в виде гибкой нерастяжимой тяги.
21
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| СХВАТ МАНИПУЛЯТОРА | 2008 |
|
RU2381892C1 |
| СХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2105665C1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1992 |
|
RU2043919C1 |
| Электромагнитное захватное устройство | 1990 |
|
SU1811481A3 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| Захватное устройство для промышленного робота-манипулятора | 1983 |
|
SU1126432A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
Изобретение касается робототехники, в частности устройств транспортных манипуляторов, предназначенных для захвата и перемещения пластин больших и сверхбольших интегральных схем в вакууме или иной контролируемой технологической среде. Целью изобретения является повышение надежности КПД манипулятора за счет исключения пар трения в герметизированном пространстве при одновременном устранении аварийных ситуаций за счет исключения разжатия зажимного устройства при отключении энергопитания. При вращении шкивов 18 от электродвигателя 19 происходит подъем управляющего электромагнита 16 вместе с внутренней телескопической трубкой 3. Вместе с ней поднимаются плоские упругие губки 7 захватного устройства. Обратный ход осуществляется под действием пружины 4. При включении электромагнита 16 происходит подъем вверх пальца 11. При этом гибкий элемент 9 распрямляется и разжимает губки 7 захватного устройства. Обратный ход губок обеспечивается за счет пружины 12. 1 з.п.ф-лы, 3 ил. Фиг.1
| Захватный комплекс | 1987 |
|
SU1581576A1 |
| i | |||
