Изобретение относится к машиностроению и может быть использовано для усовершенствования шаговых храповых механизмов.
Цель изобретения - повышение надежности.
На фиг. 1 представлен предлагаемый механизм, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1.
Реверсивный шаговый механизм содержит установленные в единый корпус 1 два (верхнее 2 и нижнее 3) храповых колеса, установленных зеркально на общей втулке- оси 4, в отверстии которой выполнена резьба, в которой установлен шток 5. В горизонтальных рас i очках корпуса 1 установлены передний 6 и задний 7 толкатели с собачками 8 и 9, которые своими выступами 10 контактируют каждая со своим храповым колесом. Каждая собачка имеет дополнительные выступы 11 и 12, которые взаимодействуют с зубьями соседнего храпового колеса и выполняют функцию обратного хода.
Реверсивный шаговый механизм работает следующим образом.
Сжатый воздух подается в напорную полость 13 одного из толкателей, происходит перемещение, например, толкателя 6 в крайнее (левое) положение, при этом собачка 8 этого толкателя выступом 10 входит в зацепление с храповым колесом 3 и поворачивает его на один шаг. При этом выступ 11 - защелка обратного хода второго храпового колеса 2 вместе с собачкой 8 отходит от своего храпового колеса и не препятствует его вращению, а выступ 12 - защелка обратного хода первого храпового колеса 3 скользит по поверхности 14 храпового колеса 3, отклоняет собачку 9. После сброса
давления в полости 13 (конец пневматического импульса) толкатель 6 под действием пружины 15 возвращается в исходное (в правое) положение. Выступ 10 скользит по поверхности 16 храпового колеса 3, отжимая от него собачку 8. В конце хода плунжера выступ 11 входит в зацепление со своим зубчатым колесом 2. Во время хода в исходное положение толкателя 6 выступ 12 собачки 9 удерживает блок колес 2 и 3 от обратного поворота.
Пружины 17 кручения на осях 18 собачек 8 и 9 служат для поджима собачек к храповым колесам 2 и 3.
Поворот блока храповых колес 2 и 3 вы- зывает за счет взаимодействия резьбовых поверхностей втулки 4 и штока 5 осевое перемещение штока 5 на величину, зависящую от количества пневмоимпульсов, поданных в соответствующую полость 13 механизма.
Изобретение обеспечивает более надежную по сравнению с известными механизмами фиксацию блока храповых колес от возможного проворота в исходном положении и во время обратного хода толкатепей и, кроме того, оно конструктивно гораздо про- 5 ш.е их, а следовательно, и надежнее в
Формула изобретения
1.Реверсивный шаговый механизм, со держащий два толкателя с приводами и за0 щелками обратного хода, связанные G чрапо- вым колесом, отличающийся тем, что. с целью повышения надежности, каждая из защелок обратного хода одного толкателя кинематически связана с другим толкателем
2.Механизм по п. 1, отличающийся тем 5 что защелка обратного хода выполнена в виде выступа на собачке соседнего толкателя
0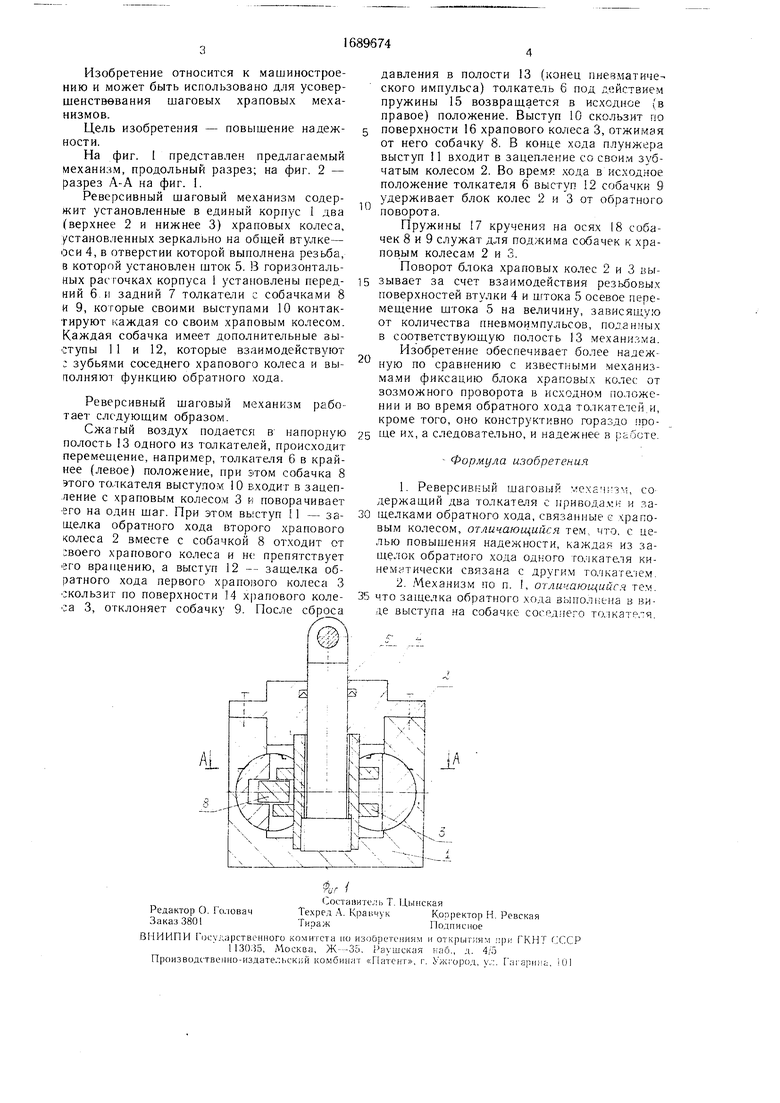
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный храповой механизм | 1986 |
|
SU1366746A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
| Реверсивный рычажно-храповой привод | 1981 |
|
SU1025947A1 |
| Электромагнитный шаговой двигатель | 1976 |
|
SU548925A2 |
| Механизм поворота распределительного барабана круглочулочного автомата | 1977 |
|
SU659666A1 |
| Реверсивный храповой механизм | 1988 |
|
SU1634887A1 |
| Транспортирующее устройство | 1980 |
|
SU967904A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |
| Устройство для хранения и подачи буровых штанг | 1990 |
|
SU1813872A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |

