(Л
17
4
ю
ел
о
4 Ю
Цель изобретения - повышение надежности работы устройства за счет использования многогранной храповой рейки в механизме шагового перемещения толкателя. Подача деталей 39 осуществляется толзкателем 5 за счёт I перемещения многогранной храповой рейки 4. На каждой грани рейки 4 имеются зубья одинакового профиля, вьтолненные с различными шагами, которые по величине равны толщинам подаваемых деталей. Для переналадки на деталь соответствующей толщины
храповая рейка 4 поворачивается нужной гра.нью к храповым собачкам, После выдачи последней детали щтан- ги 19 перемещаются вниз с помощь вилки 37 опускают толкатель 5 в нижнее положение, а скосы на штангах- - 19 перемещают каретку 15 вправо, Стол 40 поворачивается на одни шаг. Затем пневмоцилиндр 38 возвращается в исходное положение, а рейка 4 с толкателем 5 под действием пружины 9 входит в контакт с деталями 39 Производится подача деталей. 5 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1608000A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| Устройство для подачи деталей | 1985 |
|
SU1323330A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для упаковки штучных изделий в картонные коробки | 1986 |
|
SU1458279A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU994286A2 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| Устройство для отделения листовых заготовок от стопы | 1990 |
|
SU1761359A1 |


Изобретение относится к машиностроению, а именно к загрузочным устройствам, и может быть использовано при загрузке станков и.автомати- .ческих линий, в частности в атомном машшюстроении и котлостроении в производстве изделий АЭС при их поштучной выдаче под захват робота.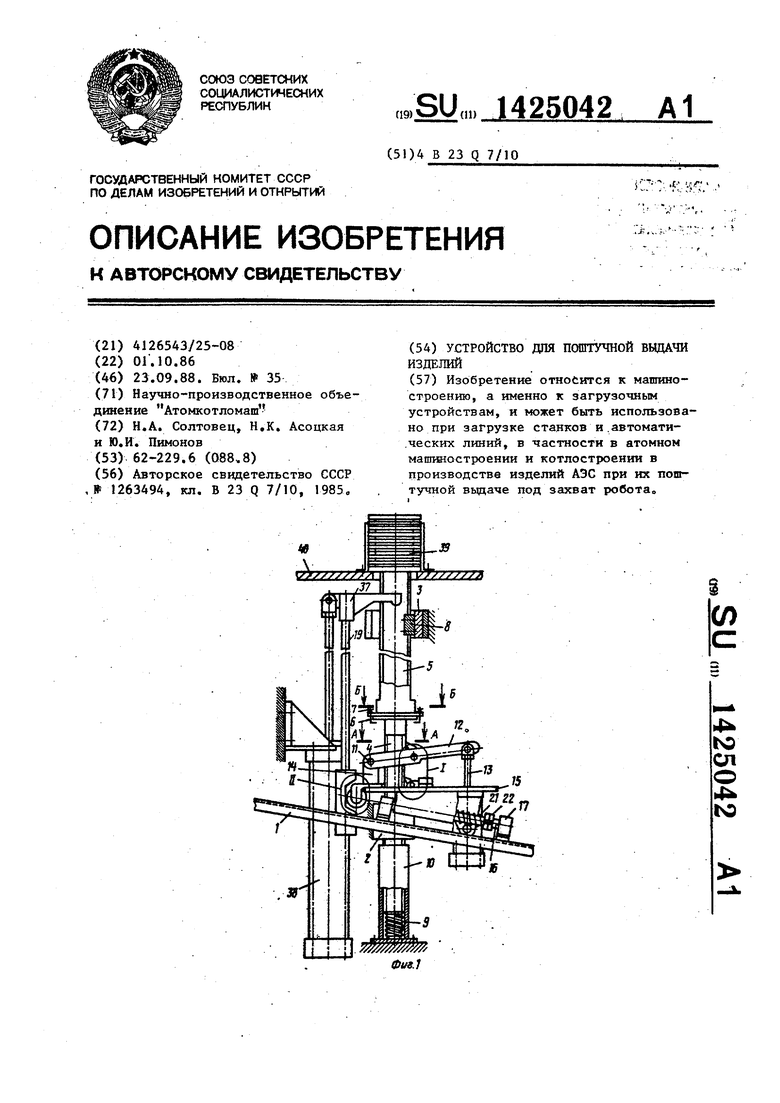
1
Изобретение относится к машиностроению, а именно к загрузочным устройствам, и может быть использовано при загрузке станков и автомата- ческих линий, в частности в атомном машиностроении и котлостроении в производстве изделий АЭС при их поштучной вьщаче под захват работа;
Цель изобретения - повышение надежности работы устройства за счет ликвидации проскальзьюания в механизме шагового перемещения толкателя.
На фиг, 1 изображено устройство, общий вид; на фиг„ 2 - узе.л Т на фиш, 1; на фиг о 3 - узел Ц на фиг„1 на фиг, 4 - разрез А-А на фиг, 1; иа фиг, 5 - разрез Б-Б на фиг, 1.
Устройство для поштучной вьщачи изделий содержит основание 1 с закрепленными на нем направляющими втулками 2 и 3, в которых вертикально установлена поворотная храповая рейка 4, связанная в осевом направлении с толкателем 5 посредством Г- образных болтов 6 и гаек 7, .
На внутренней поверхности втулки 3 размещена шпонка 8, фиксирующая толкатель 5 с храповой рейкой 4 от поворота в горизонтальной плоскости.
Нижний конец храповой рейки 4 подпружинен пружиной 9 и установлен в стакане 10, закрепленном на основании 1.
Механизм шагового перемещения выполнен в виде поворотного на оси 11 рычага 12, один конец которого соединен со штоком пневмоцилиндра 13, а другой посредством вилки 14 - с кареткой 15, которая подвижно установ- лена в направлякщих 16, размещенных в опорах 17, закрепленных на основании 1 под углом, равным углу наклона передней грани рабочего зуба храповой рейки 4 о
В торцовой части каретки установлены два контактных ролика 18 с возможностью взаимодействия с вертикальными штангами 19, размещенными в направляняцих втулках 20,
Постоянный контакт роликов 8 с вертикальными штангами 19 обеспечивается посредством пружин 21 и регулируемых гаек 22,
Нижний конец штанг 19 имеет скос 23, переходящий в вертикальную плоскость 24. Указанный скос 23 предназначен для перемещения каретки 15 на величину, необходимую для вьшода храповой подающей собачки 25 и стопорно собачки 26 из зацепления.
Храповая подающая собачка 25 размещена с возможностью поворота на оси 27, закрепленной на рычаге 12, и находится с зубом храповой рейки 4 в постоянном зацеплении, которое обеспечивается пружиной 28,
Выбор положения взаимодействия храповой подающей собачки 25 с храповой рейкой 4 регулируется упором 2
Стопорная собачка 26 с возможностью поворота установлена на оси 30 на ползушке 31, имеющей возможность вертикально перемещаться по наравляющим 32 посредством механизма регулировки, выполненного в виде регулируемого упора 33, размещенного на ползушке 31, и регулировочного винта 34, установленного в корпусе 35, закрепленном на каретке 15..
Упором 33 регулируется вз4аимодей- ствие стопорной собачки 26 с храповой рейкой 4 о
Храповая рейка 4 представляет собой объемный мйогогранник с гранями, на которых зубья имеют одинаковый профиль и размещены на гранях рейки с различкьт шагом, соответствующим высоте детал ей.
Поворотная рейка 4 с толкателем 5 в зависимости от необходимого шага зубъев, соответствующего высоте изделия, фиксируется в заданном положении посредством штифта 36.
Механизм регулировки стопорной собачки 26 предназначен для выбора разности между шагами зубъев 4 размещенных на гранях, при ее повороте на 11-ю часть. Вертикальные штанги 19 закреплены на вилк 37, связанной с штоком пневмоцилиндра 38. Детали 39 размещены в магазине на соответствующих позициях стола 40, Пневйоципиндр 13 установлен с возможностью регулировки хода его тока.
Устройство работает следукщим образом.
Перед началом работы толкатель 5 устройства находится под одной из
О
позиций стола 40, ролики 18 контактируют со срезанной вертикальной поверхностью 24,
По команде с пульта ут1равления робота ( не показан) шток пневмоци- линдра 13 перемещается вниз. Храповая подапщая собачка 25 проскальзывает по зубьям рейки 4 Б это время стопорная собачка 26 удерживает рейку в вертикальном положении. При обратном ходе вверх пневмоцилинд- ра 1.3 рычаг 12 воздействует на храповую подающую собачку 25, которая перемещается вв ерх и входит в зацепление с зубом рейки 4 и поднимает последнюю вместе с толкателем 5 и со стопой изделий 39 на один шаг, равный высоте изделия.
Цикл работы продолжается до тех, пор, пока последнее изделие 39 не снято с позиции стола 40.
После снятия последней детали 39 с позиции стола 40 при подъеме хра- повой рейки 4 на следукяций шаг срабатывает конечный выключатель (не показан), воздействунлций на пяевмо- цилиндр 38, который перемещает штанги 19 вниз. Указанные штанги контактируют своими скосами 23 с роликами 18, перемещают вместе с ними каретку 15 вправо и вьшодят .из зацепления обе собачки 25 и 26с о
Штанги 19 перемещаются вниз вместе с вилкой 37, под действием которой перемещается вниз толкатель 5 с рейкой 4 При этом пружина 9 сжимается. Перемещение вниз продолжается до нажатия ватки 37 на конечный выключатель (не показан), который подает команду на поворот стола 40,
После фиксации стола 40 на последующей позиции пневмоцил1Шдр 38 возвращается в исходное положение, а рейка 4 с толкателем 5 под действием прзгжины 9 перемещается вверх и входит в контакт с деталями 39,
В конце хода пневмоцилиидра 38 ролики 18 соскальзывают со скоса 23 штанги 19 на срезанную вертикальную поверхность 24, каретка 15 перемещается влево и собачки 25 и 26 вновь входят в зацепление с зубом храповой рейки 4.
При смене типоразмеров деталей 39 собачки 25 и 25 должны быть выведены из зацепления с рейкой 4, Отпускаются гайки 7, болты 6 разворачиваются, рейка 4 опускается вниз, разворачивается нужной гранью с шагом, соответствующим высоте детали 39, фиксируется на штифт 36 и закрепляется болтами 6 и гайками 7, Собачки 25 и 26 вновь вводятся в зацепление, и цикл работы продолжается
Формула изобретения
Устррйство для поштучной выдачи изделий, содержащее основание, толка50 те ль, механизм шагового перемещения толкателя от соответствунядего привода, механизм регулировки величины шагового перемещения толкателя, механизм возврата толкателя с соответ55 ствующим приводом, отличающееся тем, что, с целью повышения надежности работы устройства, механизм шагового перемещения толкателя выполнен в виде храповой многогранной подпружиненной рейки с зубьями одинакового профиля на каждой грани и с соответствующим шагом на каждой грани, установленной на основании с возможностью возвратно-поступательного перемещения в вертикальной плоскости, поворота в горизонтальной плоскости и фиксации ее углового положения, и двух храповых Со- бачек, npi-этем одна из собачек установлена на дополнительно введенной подпружиненной каретке, размещенной на основ.анки с возможностью возвратно-поступательного перемещения в плос кости, параллельной плоскости, проходящей через переднюю, грань рабочего зуба рейки, с возможностью взаимодействия с последней, а другая - на дополнительно введенном рычаге.
0us.Z
размещенном на каретке с возможностью поворота в вертикальной плоскости, причем свободный конец рычага связан с приводом шагового перемещения толкателя, размещенного на каретке, при то41|сатель размещен на основании с роз1 жностд1Ю возвратно-дос- тупательного перемещения в вертикальной плоскости и взаимодействия с-верхним концом храповой рейки, а механизм возврата толкателя выполнен в виде штанги с вилкой на одном конце и кулачком на другом, установленной на основании с возможностью переме щения в плоскости, параллельной направлению перемещения толкателя с , возможностью взаимодействия с рейкой посредством кулачка.
ь/
20
2
Фиг.
Ai.
ft
Фиг.
Фиг.5
| Механизм шагового перемещения | 1985 |
|
SU1263494A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
