Изобретение относится к подъемно- транспортному оборудованию, а именно к устройствам для управления торможением механизмов передвижения кранов мостового типа.
Цель изобретения - повышение точности.
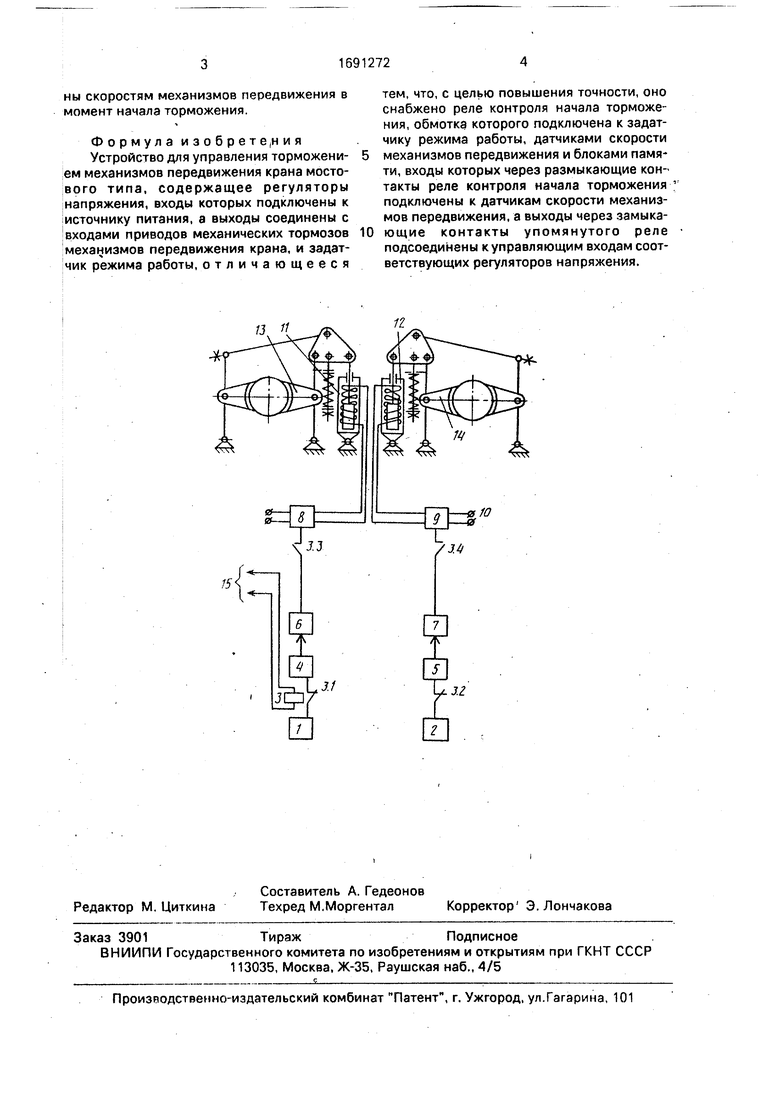
На чертеже приведена принципиальная, схема устройства.
Устройство для управления торможением раздельных механизмов передвижения опор крана мостового типа содержит датчики 1, 2 скорости механизмов, передвижения, подключенные реле 3 контроля начала торможения с размыкающими контактами 3.1, 3.2 и замыкающими контактами 3.3,3.4, блоки 4, 5 памяти. Во входных цепях блоков 4, 5 установлены аналого-цифровые преобразователи (на чертеже не показаны). Выходы блоков 4, 5 через цифроаналоговые преобразователи 6, 7 и замыкающие контакты 3.3 и 3,4 реле подключены к управляющим входам регуляторов напряжения, например к тиристорным преобразователям 8, 9, входы
которых подключены к источнику 10 питания, а выходы-к управляющим входам приводов 11, 12 механических тормозов 13, 14 механизмов передвижения Обмотка реле 3 контроля начала торможения подключена к задатчику 15 режима работы.
Устройство работает следующим образом
При торможении механизмов передвижения опор крана задатчик 19 подает сигнал на включение реле, при этом размыкаются контакты 3.1, 3.2 и замыкаются контакты 3 3 и 3.4. Блоки 4, 5 памяти . запомнили скорости соответствующих механизмов передвижения в момент начала торможения и выдают соответствующие сигналы преобразователям 8, 9. Преобразователи 8,9 поддерживают токи обмоток приводов 11, 12 механических тормозов 13, 14, амплитуды которых соответствуют скоростям механизмов передвижения в момент начала торможения, при этом тормозные моменты тормозов обратно пропорциональ«
Ё
О
ю
Ч)
VI
ю
ны скоростям механизмов передвижения в момент начала торможения.
Формула изобретения Устройство для управления торможением механизмов передвижения крана мостового типа, содержащее регуляторы напряжения, входы которых подключены к источнику питания, а выходы соединены с входами приводов механических тормозов механизмов передвижения крана, и задат- чик режима работы, отличающееся
0
тем, что, с целью повышения точности, оно снабжено реле контроля начала торможения, обмотка которого подключена к задат- чику режима работы, датчиками скорости механизмов передвижения и блоками памяти, входы которых через размыкающие контакты реле контроля начала торможения подключены к датчикам скорости механизмов передвижения, а выходы через замыкающие контакты упомянутого реле подсоединены к управляющим входам соответствующих регуляторов напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Устройство для управления механизмом горизонтального перемещения подъемного транспортного средства | 1985 |
|
SU1344712A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1534715A1 |
| Регулятор мощности дуговой электро-пЕчи | 1979 |
|
SU797086A1 |
| Колодочный тормоз | 1990 |
|
SU1759787A1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления торможением механизмов передвижения кранов мостового типа. Цель изобретения - повышение точности. Датчики 1,2 скорости механизмов передвижения подключены через блоки 5, 6 памяти к управляющим входам тиристорных преобразователей 11, 12, питающих приводы 14, 15 механических- тормозов 16,17. В момент начала торможения блоки 5,6 запоминают скорости механизмов и управляют преобразователями 11, 12 приводов 14, 15 1 ил.
13 Я
| Устройство для управления торможением опор крана мостового типа | 1983 |
|
SU1093682A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
