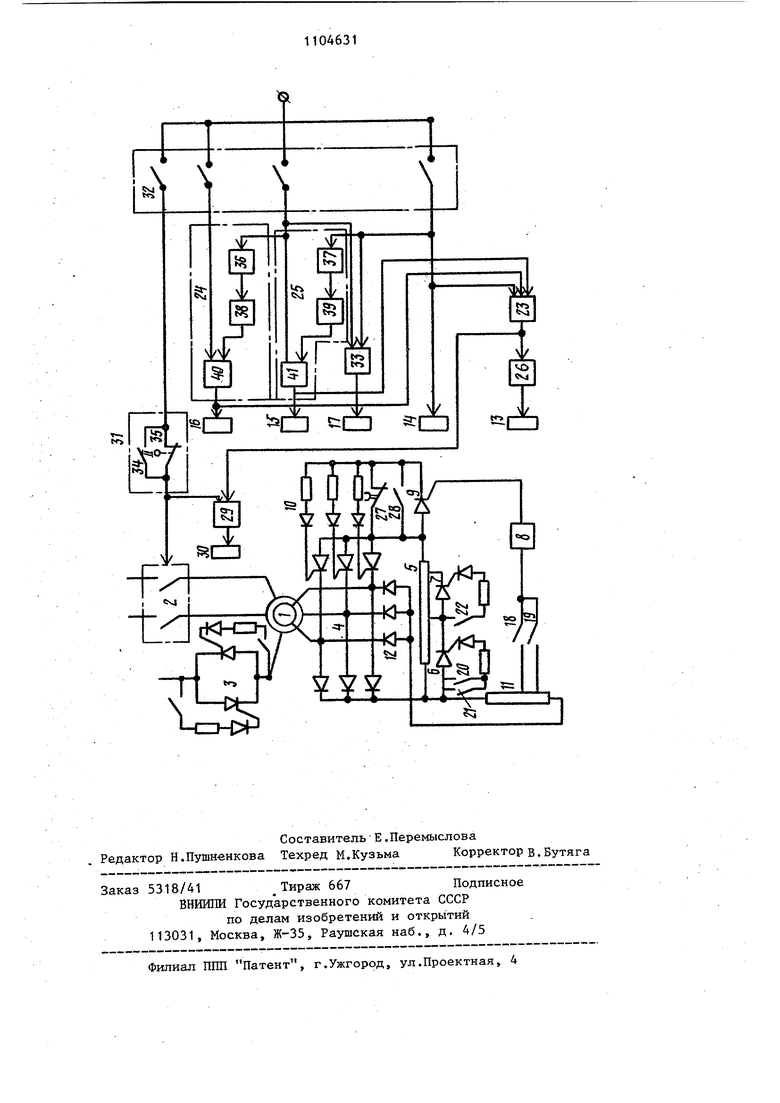
Изобретение относится к электротехнике и может быть использовано в электроприводах различных грузоподъемных механизмов. Известен электропривод механизма передвижения крана, содержащий асинхронный электродвигатель, основной коммутатор в цепи обмотки статора, тиристорный коммутатор в цепи обмотки ротора, к выходу которого подкл1очен резистор, последовательно сое диненные пороговый элемент и распределитель импульсов, выход которого соединен с управляющими электродами тиристоров коммутатора, вход порогового элемента соединен с анодной группой тиристоров коммутатора, дополнительный коммутатор, соединенный с вькодомтиристорного коммутатора и с двумя фазами обмотки статора, блок управления, соединенный с управляющими,входами коммутаторов Ci Недостатком этого устройства является низкая надежность работы изза того, что в области малых нагрузок электропривод теряет устойчивост при переходе из двигательного режима в режим торможения. Наиболее близким по технической сущности к изобретению является электропривод механизма передвижения крана, содержащий асинхронный электродвигатель, две фазы обмотки статора которого подключены через один коммутатор к зажимам для подключения к источнику питания, тиристорньй коммутатор, вход которого соединен с обмоткой ротора электродвигателя, а выход подключен к резистору, тирис торы, подключенные параллельно резис тору, дополнительный резистор, подключенный через вьшрямитель к обмотке ротора, последовательно соединенные пороговый элемент и ключевой элемент, выход которого через распре делитель импульсов соединен с управляющими электродами тиристоров коммутатора, а вход порогового элемента соединен с дополнительным резистором через контакты одних релейных элементов, другие контакты которых подключены к управляющим электродам тиристоров, командоаппарат, выходами соединенный с одними релейными элементами 2 J, Недостатком известного устройства является низкая производительность механизма в связи с тем, что при уменьшении скорости тиристоры коммутатора закрываются, так как напряжение порогового элемента становится выше, чем напряжение управления (переключались контакты релейных элементов) . Поэтому электродвигатель продолжает вращаться и уменьшает скорость вращения за счет статического момента сопротивления нагрузки. Однако при таком низком уровне замедления значительно уменьшается точность остановки электропривода в заданной позиции, так как отключение электродвигателя необходимо производить на значительном расстоянии от места остановки. Неточность останова механизма приводит к повторному включению электродвигателя для достижения заданной позиции, чем увеличивается время, затрачиваемое на доставку грузов, и соответственно уменьшается производительность работы механизма. Другой недостаток состоит в низкой надежности работы устройства из-за того, что возможно нарушение коммутации тиристоров при их переключении в момент перехода на пони-женную скорость с применением торможения, так как на повышенной скорости из-за низкой частоты тока в обмотке ротора тиристоры длительное время находятся во включенном состоянии при снятии управляющего сигнала. Целью изобретения является повышение надежности. Указанная цель достигается тем, что в электропривод механизма передвижения крана, содержащий асинхронный электродвигатель, две фазы обмотки статора которого подключены через один коммутатор к зажимам для подключения к источнику питания, тиристорный коммутатор, вход которого соединен с обмоткой ротора электродвигателя, а выход подключен к резистору, тиристоры, подключенные параллельно резистору, дополнительный резистор, подключенньш через выпрямитель к обмотке ротора, последовательно соединенные пороговьй элемент и ключевой элемент, выход которого через распределитель импульсов соединен с управляющими электродами тиристоров коммутатора, а вход порогового элемента - с дополнительным резистором через контакты одних релейных элементов, другие контакты которых подключены к управляющим электродам тиристоров, командоаппарат, выходами соединенный с одними релейными элементами, введены другой коммутатор, реле времени, друго релейный элемент, датчик точного останова, элемент И и элемент ИЛИ, выход которого соединен с одним вхо дом элемента И, связанного выходом через другой релейный элемент с управляющим входом другого коммутатора в цепи третьей фазы обмотки статора электродвигателя и с реле времени, замыкающий контакт которог подключен параллельно ключевому эле менту, входы элемента ИЛИ соединены с входами одних релейных элементов, другой вход элемента И соединен с входом одного коммутатора и через датчик точного останова - с выходом командоаппарата. Кроме того, в электропривод меха низма передвижения крана могут быть введены другой элемент ИЛИ и релейный элемент, вход которого соедине с выходом элемент ИЛИ, соединенного входами с соответствующими выходами командоаппарата, замыкающий контакт релейного элемента подключе параллельно датчику точного останона. На чертеже показана блок-схема устройства. Электропривод механизма передвижения крана содержит асинхронный электродвигатель 1, две фазы обмотк статора которого подключены к источ нику питания через один коммутатор а третья фаза обмотки статора - через другой коммутатор 3, тиристорный коммутатор 4,вход которого соединен с обмоткой ротора электродвигателя 1, а выход подключен к резис тору 5, тиристоры 6 и 7, подключенные параллельно резистору 5, последовательно соединенные пороговый элемент 8 и ключевой элемент 9, выход которого через распределитель 1 импульсов соединен с управляющими выходами тиристоров коммутатора 4, резистор 11, подключенный к обмотке ротора через выпрямитель 12 реле 13 времени, релейные элементы 14 - 17, причем вход порогового элемента 8 соединен с резистором 11 через контакты 18 и 19 релейных элементов 15 и 16, а контакты 20 - 22 соответственно релейных элементов 16 - 14 на ходятся в цепи управляющих электродов тиристоров 6 и 7, элемент ШШ 23, входы которого соединены с выходами блоков 24 и 25 управления, а выход элемента ИЛИ 23 через блок 26 управления соединен с реле 13 времени, контакт 27 которого включен параллельно ключевому элементу 9 и контакту 28 релейного элемента 14, элемент И 29, выход которого через релейный элемент 30 соединен с управляющим входом коммутатора 3, а один его вход соединен с выходом элемента ИЛИ 23, другой вход - с выходом блока 31 управления, соединенного с управляющим входом коммутатора 2 и с командоаппаратом 32, выходы которого соединены с входами блоков 24 и 25 управления, релейным элементом 14 и со входами элемента ИЛИ 33, соединенного выходом с реленым элементом 14, контакт 34 которого включен параллельно датчику 35 точной остановки, блоки 24 и 25 содержат последовательно соединенные элементы НЕ 36 и 37, элементы 38 и 39 задержки и элементы И 40 и 41, соединенные другими входами с выходами командоаппарата 32. Устройство работает следующим образом. После замыкания контактов командоаппарата 32 сигнал подается через блок 31 управления на вход коммутатора 2, который вк.шочается, и на две фазь обмотки статора электродвигателя 2 подается напряжение от источника питания. Включается также один из релейных элементов, например 15, так как на входы элемента И 41 подаются один сигнал от командоаппарата 32 и другой сигнал от элемента НЕ 37 череэ элемент 39 задержки, входящие в блок 25 управления. Релейный элемент 15 замыкает контакты 18 и 21. Соответственно напряжение, снимаемое с резистора 11, подается через пороговый элемент 8 на вход ключевого элемента 9. Включаются тиристор 6 и ключевой элемент 9. Напряжение в виде управляющего импульса через распределитель 10 импульсов подается на управляющие электроды тиристоров коммутатора 4, которые включаются и замыкают обмотку ротора «электродвигателя 11 на резистор 5. Коммутатор 3 находится во включенном положении тока, так как на вход элемента ИЛИ 23 подается сигнал с выхода элемента И 41 . Элемент И 291 также находится во включенном положениИа так как на его входы подаются сигналы с выхода элемента ИЛИ 23 и с выхода блока 31 управления. Релейный элемент 30 замыкает контакты в цепи управляющего входа коммутатора 3. Электродвигатель 1 приходит во вращение и при достижении скорости, при которой сигнал напряжения обмотки ротора становится ниже порога срабатывания элемента 8, тиристоры коммутатора 4 закрываются и электродвигатель 1 тормозится. При снижении скорости снова возрастает напряжение в цепи обмотки ротора электродвигателя, что приводит к отпиранию тирис торов коммутатора 4. Таким образом, скорость электродвигателя поддерживается на заданном уровне импульсным способом регулирования. Переход на повышенную скорость происходит после отключения релейного элемента 15 и включения релейного элемента 14, когда замыкаются контакты 28 и 22. Перед остановкой механизма нёобхо димо уменьшить скорость электродвига теля . Переключаются контакты командо аппарата 32. Отключается релейный элемент 14, однако релейный элемент 15 не включится, так как сигнал с элемента НЕ 37 на вход элемента И поступает с временной задержкой. Поэтому элемент И 41 выключен. На выхо де элемента ИЛИ 23 сигнал принимает нулевое значение . Релейньй элемент 30 отключается и коммутатор 3 находится-в отключенном положении. Отключается ключевой элемент 9, тиристоры 6 и 7 и с за116 держкой на время окончания коммутации тиристоров замыкается.контакт 27 реле 13 времени. Тиристоры коммутатора 4 открываются и электродвигатель 1 питается от источника переменного тока по двум фазам. Так как в цепи обмотки ротора электродвигателя 1 включен резистор 5 с достаточно большим сопротивлением, то на валу электродвигателя возникает тормозной моуменьшению скорости. После завершения временной задержки на вход элемента И 41 подается управляющий сигнал. Релейный элемент 15 включается и электродвИ|Гатель 1 переходит на пониженную скорость. Перед остановкой происходит переключение релейных элементов аналогично тому, как описано выше. Включен релейный элемент 16 и отключен релейный элемент 17, так как на выходы элемента ИЛИ 33 не постуггают управляющие импульсы. Контакт 34 разомкнут и на управляющий вход коммутатора 2 поступает сигнал от командоаппарата 32 через датчик 35 точной остановки. После достижения заданного положений . датчик 35 размыкается и коммутатор 2 отключается. На обмотку статора электродвигателя 1 не подается напряжение и он останавливается. Таким образом, предлагаемое устройство обеспечивает автоматический переход из двигательного режима в режим торможения и наборот при переключении скоростей электродвигатели, чем достигается высокая надежность его работы.
N


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод для грузоподъемного механизма | 1980 |
|
SU989719A2 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
| Электропривод переменного тока | 1987 |
|
SU1473062A1 |
| Устройство для управления приводом механизма горизонтального перемещения подъемно-транспортного средства | 1989 |
|
SU1805093A1 |
| Устройство для управления двухдвигательным электроприводом | 1982 |
|
SU1053245A1 |
| Асинхронный вентильный каскад | 1983 |
|
SU1159145A1 |
| Способ управления асинхронным электроприводом | 1984 |
|
SU1334334A1 |
| ЭЛЕКТРОПРИВОД | 2005 |
|
RU2277746C1 |
| Устройство для пуска асинхронного электродвигателя | 1980 |
|
SU909777A1 |
| Устройство для точного останова электропривода | 1978 |
|
SU921007A1 |
ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ КРАНА, содержащий асинхронный электродвигатель, две фазы обмотки статора которого подключены через один коммутатор к зажимам для подключения к источнику питания, тиристорньй коммутатор, вход которого соединен с обмоткой ротора электродвигателя , а выход подключен к резистору, тиристоры, подключенные параллелЬно резистору, дополнительный резистор, подключенньй через выпрямитель к обмотке ротора, последовательно соединенные пороговый элемент и ключевой элемент, выход которого через распределитель импульсов соединен с управляющими электродами тиристоров коммутатора, а выход порогового элемента - с дополнительным резистором через контакты одних оелеййых элементов, другие контакты которьк подключены к управляют -™ электродам тиристоров, командоаппарат, выходами соединенный с одними релейными элементами, отличающийся тем, что, с целью повышения надежности, в него введены другой коммутатор, реле времени, другой релейный элемент, датчик точного останова, элемент И и элемент ИЛИ, выход которого соединен с одним входом элемента И, связанного выходом через другой релейный элемент с управляющим входом другого коммутатора в цепи третьей фа.зы обмотки статора электродвигателя и с реле времени, замыкающий контакт которо(Л го подключен параллельно ключевому элементу, входы элемента ИЛИ соединены с входами одних релейных элементов, другой вход элемента И с входом одного коммутатора и через датчик точного останова - с выходом командоаппарата. 2. Электропривод по п. 1, отличающийся тем, что в него введены другой элемент ШШ и релей4 ный элемент, вход которого соединен О) с вьпсодом элемента ИЛИ, соединенного со входами с соответствующими выходами командоаппарата, замыкающий контакт релейного элемента подключен параллельно датчику точного останова.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для регулирования частоты вращения асинхронного двигателя | 1980 |
|
SU936326A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
