Изобретение относится к приборостроению и может найти применение для автоматизации контроля и управления движением горных машин в профиле залегания пласта, а также может использоваться при создании систем автоматического вож- . дения мобильных объектов относительно светоконтрастных ориентирующих линий.
Целью изобретения является повыше- ние надежности за счет исключения влияния нестабильности освещенности.
Сущность изобретения заключается в освещении участка контролируемой поверхности, включающей ориентирующий слой, восприятии сигналов отраженного светового потока двумя фото преобразователями, по сравнению сигналов с которых формируют управляющий сигнал, задании опорного сигнала, суммировании сигналов с фотопреобразователей, сравнении их с заданным и
коррекции освещенности по сигналу рассогласования.
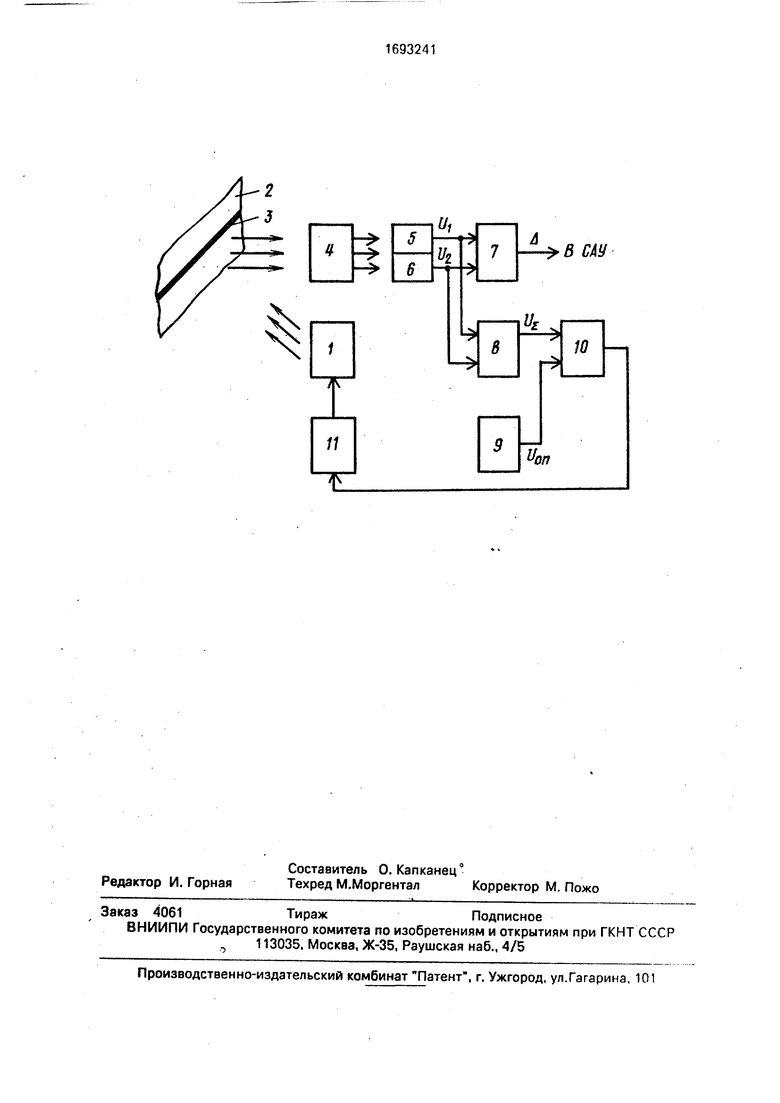
На чертеже представлена структурная схема устройства, реализующего предлагаемый способ.
Устройство содержит источник 1 излучения, облучающий участок 2 контролируемой поверхности, включающей ориентирующий слой 3, объектив 4, воспринимающий отраженный поток, фотопреобразователи 5 и 6, расположенные в плоскости изображения объектива 4 смежно один с другим и перпендикулярно изображению ориентирующего слоя. Выходы фотопреобразователей под- f ключены к блоку 7 вычитания и сумматору 8, выход которого подключен к первому входу блока 9 сравнения, к второму входу подключен задатчик 10 опорного напряжения. Выход блока 9 сравнения через усилитель 11 подключен к источнику 1 излучения.
О
ю
СА)
ю
««&
Способ осуществляется следующим образом.
Источник 1 излучения освещает участок 2 контролируемой поверхности, лежащей в поле зрения устройства и включающей ориентирующий слой 3. Отраженный поток через объектив 4 падает на фото преобразователи 5 и б, расположенные в поле зрения объектива 4, преобразующие падающий световой поток в электрический сигнал. При нахождении мобильного объекта в заданном положении изображению ориентирующего слоя проецируется в равной мере на первый и второй фотопреобразователи. Световые потоки, падающие на фотопреобразователи, равны, соответственно равны и электрические сигналы фотопреобразователей. На выходе схемы вычитания, формирующей разностный сигнал AD Ui - U2, напряжение равно нулю.
При смещении объекта относительно ориентирующего слоя вверх или вниз смещается соответственно и его изображение. При этом изображение ориентирующего слоя проецируется не в равной мере на фотопреобразователи, световые потоки, воспринимаемые фотопреобразователями, не равны и на выходе схемы вычитания формируется разностный сигнал AD DI - U2 Т5 О, знак которого характеризует направление смещения объекта относительно ориентирующего слоя, а амплитуда - величину отклонения.
Выходы фотопреобразователей 5 и.6 подключены к сумматору 8, на выходе которого формируется напряжение, равное сумме напряжений на выходе фотопреобразователей, т.е. UЈ Ui + IJ2. Этот сигнал подается на вход схемы 9 сравнения, к второму входу которой подключен задатчик 10 опорного напряжения, посредством которого определяется положение рабочей точки на световой характеристике фотопреобразователей. На выходе схемы сравнения формируется разностный сигнал, который усиливается усилителем 11 и
подается на источник 1 излучения. При изменении величины светового потока, падающего на фотопреобра зователи, вследствие изменений отражательной способности контролируемой поверхности, пропускания атмосферы и тому подобного изменяется напряжение на выходе сумматора и, соответственно, напряжение на выходе усилителя 11, что приводит к
изменению светового потока, излучаемого источником 1, до величины, пока напряжение на выходе сумматора не станет равно прежнему значению. Этим достигается стабилизация рабочей точки фотопреобразователей на их световой характеристике и исключается влияние погрешностей, обусловленных неидентичностью световых характеристик фотопреобразователей, на величину сигнала отклонения. Благодаря
этому повышается надежность контроля положения объекта относительно ориентирующего слоя и обеспечивается нормальная работа устройства в реальных производственных условиях при низких значениях
контраста ориентирующего слоя и большом динамическом диапазоне изменений освещенности и отражательной способности контролируемой поверхности.
Формула изобретения
Способ контроля положения горного комбайна в профиле пласта, заключающийся в освещении участка контролируемой поверхности, восприятии сигналов отраженного светового потока двумя фотоприемниками, по сравнению сигналов с которых формируют управляющий сигнал, отличающийся тем, что, с целью повышения надежности за счет исключения влияния нестабильности освещенности, задают
опорный сигнал, суммируют сигналы с фото- приемников, полученный суммарный сигнал сравнивают с заданным опорным сигналом и по сигналу рассогласования корректируют освещенность контролируемой
поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического контроля положения горного комбайна в профиле пласта | 1988 |
|
SU1617140A1 |
| Устройство для контроля положения мобильного объекта относительно ориентирующей линии | 1989 |
|
SU1767478A2 |
| Устройство для идентификации двухцветных объектов | 1990 |
|
SU1783321A1 |
| Устройство для контроля положения мобильного объекта относительно ориентирующего слоя | 1988 |
|
SU1638708A1 |
| Устройство контроля положения самоходной машины относительно ориентирующего слоя | 1985 |
|
SU1288297A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Устройство для автоматического обнаружения неоднородностей в изображениях аэрофотонегативов | 1984 |
|
SU1337871A1 |
| Способ измерения смещения изображения границы объекта | 1985 |
|
SU1325300A1 |
| Оптико-электронное устройство для измерения линейных и угловых перемещений | 1985 |
|
SU1265476A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949174A2 |
Изобретение относится к приборостроению и предназначено для автоматизации контроля и управления движением горных машин в профиле залегания пласта. Цель изобретения - повышение надежности за счет исключения влияния нестабильности освещенности. Для этого освещают участок контролируемой поверхности, включающий ориентирующий слой. Отраженный световой поток воспринимают двумя фотопреобразователями. По сравнению сигналов с них формируют управляющий сигнал. Задают опорный сигнал, суммируют сигналы с фотопреобразователей, сравнивают полученный сигнал с опорным и по сигналу рассогласования корректируют освещенность контролируемого участка. 1 ил.
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
