Изобретение относится к автоматизации производственных процессов, в частности автоматизации вожден ля горных машин в профиле пласта.
Цель изобретения - повышение помехоустойчивости устройства за счет исключения влияния оптических помех.
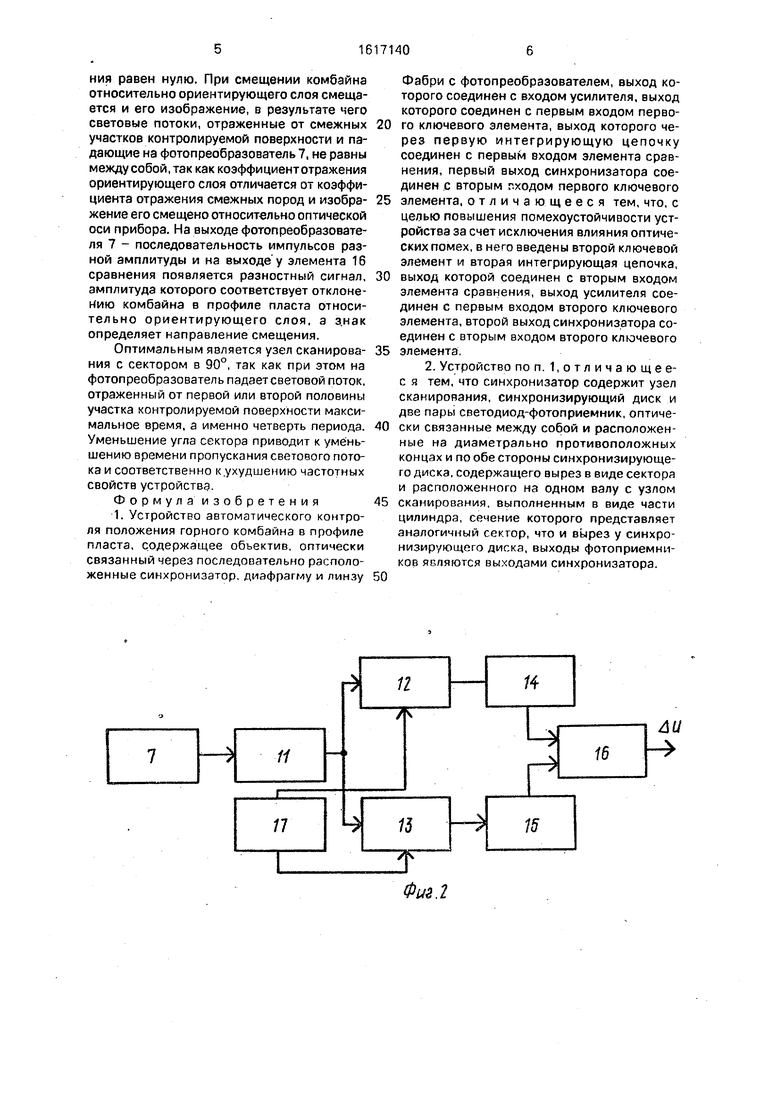
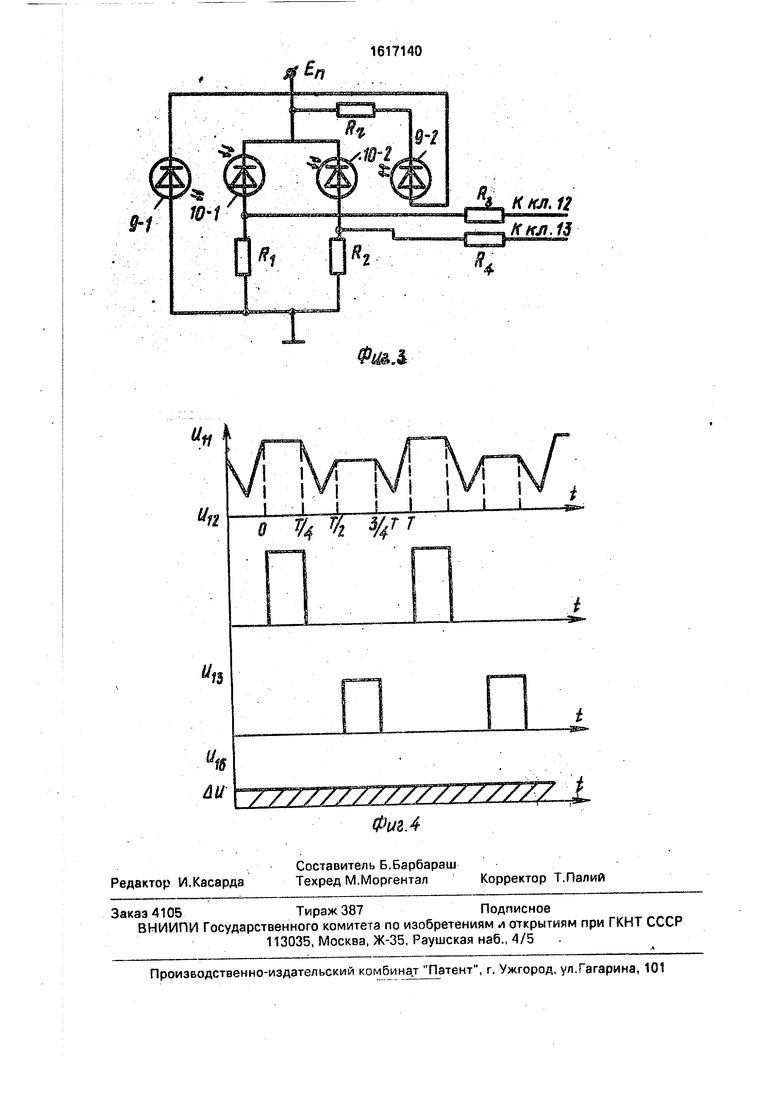
На фиг, 1 приведена оптико-механическая часть устройства; на фиг. 2 - структурная схема; на фиг. 3 - принципиальная схема синхронизатора; на фиг. 4 - временные диаграммы.
Позицией 1 обозначен контролируемый участок поверхности, а позицией 2 - ориентирующий слой (фиг. 1).
Устройство автоматического контроля положения горного комбайна в гфофиле пласта содержит объектив 3, узел 4 сканирования, диафрагму 5, линзу 6 Фабри, фото- преобразователь 7, синхронизирующий диск 8, светодиоды 9, фотоприемники 10, усилитель 11; ключевые элементы 12 и 13, интегрирующие цепочки 14 и 15, эле-/ент 16 сравнения, синхронизатор 17. Uii - напряжение на выходе усилителя 11; Ui2 - напряжение на выходе ключевого элемента 12; Ui3 - напряжение на выходе ключевого элемента 13; Ui6- напряжение на выходе элемента 16 сравнения.
Узел 4 сканирования выполнен, например, в виде вращающейся части цилиндра, .имеющей в разрезе вид четверти круга, но может иметь в сечении сектор с углом от 10
до 90°.
Синхронизатор состоит из синхронизирующего диска 8, закрепленного на одном валу с узлом 4 сканирования, двух светоди- одов 9-1 и 9-2, фотодиодов 10-1 и 0-2, установленных друг против друга йо обе стороны синхронизирующего диска 8 на диаметрально противоположных концах, Синхронизирующий диск 8 имеет вырез в четверть круга и закреплен таким образом, чтобы при пропускании сканирования светового потока от одной из половин контролируемой поверхности, вырез диска находился напротив одной из пар светоди од - фотодиод.
Устройство работает следующим образом.
Отраженный от контролируемой поверхности световой поток, излучаемый внешним источником света, проходит черэз объектив3, узел 4 сканирования, дмафрапиу 5 линзу 6 Фабри, направляющую ссетовои поток, прошедший объектив, на фотопреобразователь 7, преобразующий световой поток в электрический сигнал, Прм вращении узла 4 сканирования изображение контролируемой поверхности делится на две равные части, Б период О...Т/4 узел 4 сканирования перекрывает верхнюю половину изображения контролируемой поверхности, В период Т/4...Т/2 узел 4 сканирования зани- мает промежуточное значение. В период Т/2..,Т/4 узел 4 сканирования перекрывает нижнюю половину изображения, а в период 3/4 Т...Т - занимает промежуточное положение,
0 Таким образом, при вращении узла 4 сканирования поочередно перекрмваются то верхняя, то нижняя половины изображения контролируемой поверхности и на фотопреобразователе 7 формируется последователь- 5 ность импульсов, амплитуда которых соответствует световым потокам, отраженным от каждой из половин участка контролируемой поверхности (фиг. 4). Выделение координат цепи осуществляется посредст- 0 вом синхронного детектирования сигнала фотоприемника. В период времени О...Т/4, когда на фотопреобразователе 7 формируется сигнал, соответствующий световому потоку, отраженному от нижней половины 25 контролируемого участка поверхности, вырез синхронизирующего диска 8 проходит над одной из пар светодмод - фотод /юд. Сопротивление фотодиода резко уменьшается. При этом на резисторе Ri (фиг. 3)форми- 30 руется импульс напряжения, закрывающий ключевой элемент 12. Выход усилителя 11 подключается к интегрирующей цепи 14, выделяющей постоянную составляющую
сигнала.
35В период Т/2...3/4 Т на фотопреобразователе 7 формируется сигнал, соответствующий световому потоку, отраженному от второй половины участка контролируемой поверхности. При этом вырез синхронизи- 40 рующего диске 8 проходит между второй парой светодиод - фотодиод. На резисторе R2 фор1 1ируется импульс напряжения, закрывающий ключевой элемент 13, и выход усилителя 11 подключается к второй интегрирующей цепи 15. Выходы интегрирующих . цепей подключены к злемеиту 16 сравнения. На выходе его формируется сигнал Д U, амплиту,ца которого соответствует величине 5 смещения ориентирующего слоя -относительно оптической оси устройства, а знак определяет направление смещения.
Устройство закрепляется на ограждающем щите комбайна напротив ориентирую- 10 щего слоя. При нахождении комбайна точно в про филе пласта, оптическая ось устройства делит изображение ориентирующего слоя тонко пополам. В этом случае световые потоки, отраженные .от двух смежных рав- 15 ных участков контролируемой поверхности, равны. и сигнал на выходе элемента сравнения равен нулю. При смещении комбайна относительно ориентирующего слоя смещается и его изображение, в результате чего световые потоки, отраженные от смежных участков контролируемой поверхности и падающие на фотопреобразователь 7, не равны между собой, так как коэффициент отражения ориентирующего слоя отличается от коэффициента отражения смежных пород и изобра- жение его смещено относительно оптической оси прибора. На выходе фотопреобразователя 7 - последовательность импульсов разной амплитуды и на выходе у элемента 16 сравнения появляется разностный сигнал, амплитуда которого соответствует отклонению комбайна в профиле пласта относительно ориентирующего слоя, а з,нак определяет направление смещения.
Оптимальным является узел сканирова- ния с сектором в 90°, так как при этом на фотопреобразователь падаетсеетовой поток, отраженный от первой или второй половины участка контролируемой поверхности максимальное время, а именно четверть периода. Уменьшение угла сектора приводит к уменьшению времени пропускания светового потока и соответственно к.ухудшению частотных свойств устройства.
Формул аизобретения
1. Устройство автоматического контроля положения горного комбайна в профиле пласта, содержащее объектив, оптически связанный через последовательно расположенные синхронизатор, диафрагму и линзу
Фабри с фотопреобразователем, выход которого соединен с входом усилителя, выход которого соединен с первым входом первого ключевого элемента, выход которого через первую интегрирующую цепочку соединен с первым входом элемента сравнения, первый выход синхронизатора соединен с вторым г.ходом первого ключевого элемента, отличающееся тем, что, с целью повышения помехоустойчивости устройства за счет исключения влияния оптических помех, в него введены второй ключевой элемент и вторая интегрирующая цепочка, выход которой соединен с вторым входом элемента сравнения, выход усилителя соединен с первым входом второго ключевого элемента, второй выход синхронизатора соединен с вторым входом второго ключевого элемента,
2. Устройство по п. 1,отличающее- с я тем, что синхронизатор содержит узел сканирования, синхронизирующий диск и две пары светодиод-фотоприемник, оптически связанные между собой и расположенные на диаметрально противоположных концах и по обе стороны синхронизирующего диска, содержащего вырез в виде сектора и расположенного на одном валу с узлом сканирования, выполненным в виде части цилиндра, сечение которого представляет аналогичный сектор, что и вырез у синхронизирующего диска, выходы фотоприемников являются выходами синхронизатора.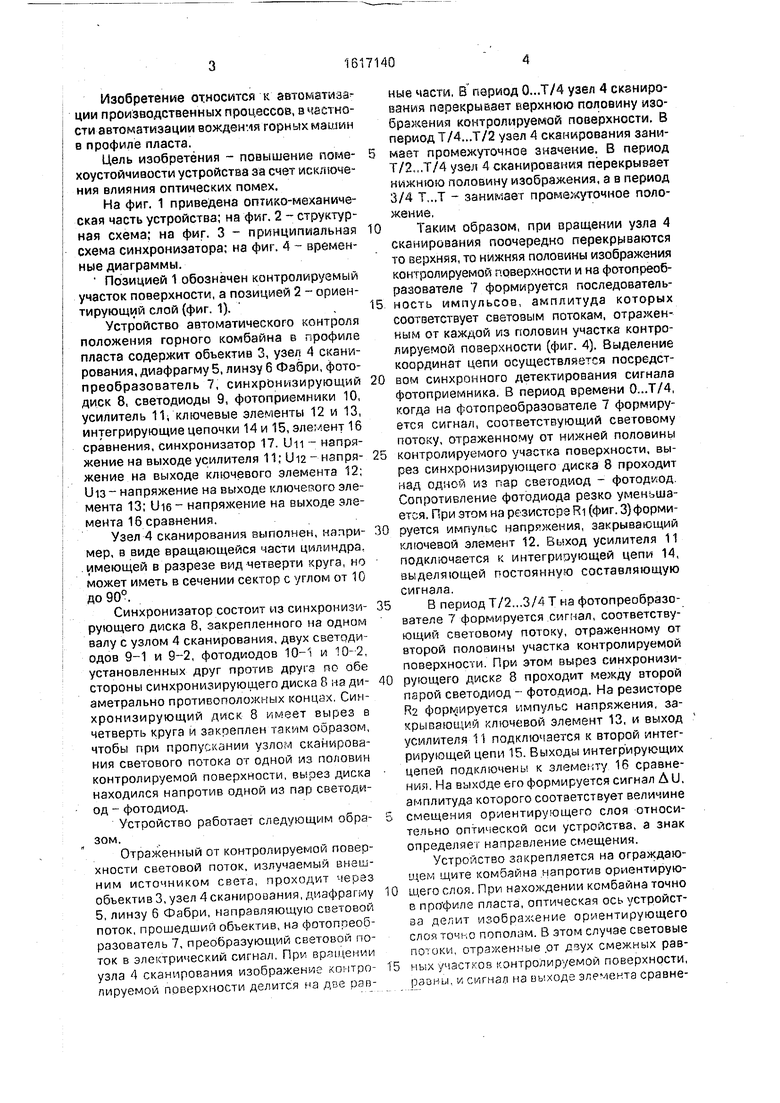
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля положения самоходной машины относительно ориентирующего слоя | 1985 |
|
SU1288297A1 |
| Способ контроля положения горного комбайна в профиле пласта | 1989 |
|
SU1693241A1 |
| Устройство для контроля положения мобильного объекта относительно ориентирующего слоя | 1988 |
|
SU1638708A1 |
| Устройство для измерения индикатрис рассеяния света | 1988 |
|
SU1603255A1 |
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| Устройство для контроля положения мобильного объекта относительно ориентирующей линии | 1989 |
|
SU1767478A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949174A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU901514A1 |
| Устройство для измерения индикатрис рассеяния света | 1987 |
|
SU1481649A1 |
Изобретение относится к автоматизации вождения горных машин в профиле пласта. Цель изобретения - повышение помехоустойчивости устройства за счет исключения влияния оптических помех. Устройство закрепляется на горной машине, например на ограждающем щите комбайна напротив ориентирующего слоя 2. Отраженный от контролируемой поверхности 1 световой поток попадает на объектив 3. Объектив 3 оптически связан через последовательно расположенные синхронизатор 17, диафрагму 5 и линзу Фабри 6 с фотопреобразователем 7. При смещении комбайна относительно ориентирующего слоя 2 световые потоки, отраженные от смежных участков контролируемой поверхности 1, не будут равны между собой. На выходе фотопреобразователя 7 будет последовательность импульсов, которая, пройдя через два ключевых элемента и две интегрирующие цепочки, попадает на входы элемента сравнения. На выходе элемента сравнения появится разностный сигнал управления комбайном. Ключевые элементы подключены к выходам синхронизатора 17. Синхронизатор 17 содержит узел 4 сканирования, на одном валу с которым находится синхронизирующий диск 8 с вырезом. По обе стороны синхронизирующего диска 8 расположены две пары светодиодов 9 и фотоприемников 10. Узел 4 сканирования выполнен в виде части цилиндра. 1 з.п. ф-лы. 4 ил.
ли
h
zr
Физ.2
/f/гл./
| Способ автоматического вождения горного комбайна по гипсометрии пласта и устройство для его осуществления | 1975 |
|
SU601414A1 |
| кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| кл, 299/1, 1978 (прототип). | |||
