1
(21)4739654/03 (22)21.09.89 (46)30.11.91. Бюл. №44
(71)Всесоюзный научно-исследовательский институт нефтяного машиностроения
(72)А.Я. Райхель, В.Д. Гаджиев и Ш.Р. Руви- нов
(53)621.867(088.8)
(56)Авторское свидетельство СССР Мг 1258785, кл. В 65 G 25/08, 1984.
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА
(57)Изобретение относится к транспортному машиностроению. Цель изобретения - повышение надежности работы устройства. Тележка (Т) 6 установлена с возможностью возвратно-поступательного перемещения по ходовому пути в виде верхних 1 и нижних 2 направляющих. На Т 6 расположены две приводные звездочки 7, которые находятся в зацеплении с двумя неподвижными роликовыми цепями 8, приводя Т 6 в движение.
Опорные элементы для Т 6 выполнены в виде двух пар установленных на Т 6 посредством осей 9 и расположенных в вертикальной плоскости наклонных рычагов (Р) 10 с опорными колесами 11 на их концах. Причем ось 9 каждого Р 10 расположена выше его центра тяжести. Верхние опорные колеса 11 одной из пар Р 10 установлены с возможностью взаимодействия с верхними направляющими 1 при рабочем ходе Т 6. На осях 9 шарнирно закреплены захватные элементы в виде тяг 13с крюками на концах, которые служат для захвата груза, в частности транспортного средства. При перемещении Т 6 под тяговой нагрузкой обеспечивается контакт с направляющими 1 и 2 тремя парами колес: двумя парами со стороны нагруженных Р 10 и нижней парой ненагруженных опорных Р 10. Это обеспечивает перемещение Т 6 без толчков и вибраций. В результате надежность работы устройства достаточно высока. 1 з.п. ф-лы. 4 ил.
Ё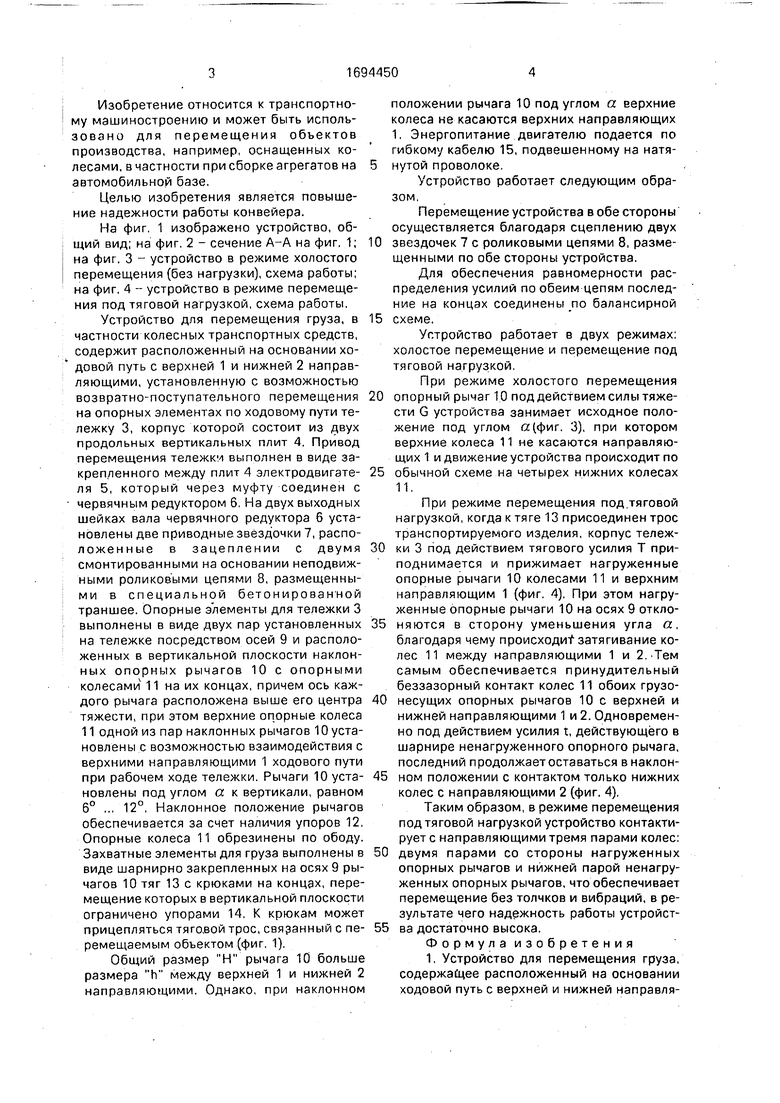
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ШАНДОРОВ В ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1934 |
|
SU46192A1 |
| Ленточный конвейер | 1989 |
|
SU1759755A1 |
| Подвесной конвейер | 1959 |
|
SU122067A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Грузозахватное устройство | 1985 |
|
SU1393747A1 |
| РУЧНАЯ ТЕЛЕЖКА | 1991 |
|
RU2011589C1 |
| СИСТЕМА РАЗГРУЗКИ И СПОСОБ РАЗГРУЗКИ ТРАНСПОРТНОЙ ТЕЛЕЖКИ ДЛЯ ПРОТЕКТОРОВ ШИН | 2015 |
|
RU2656465C2 |
| ЖЕЛЕЗНОДОРОЖНАЯ ПЛАТФОРМА | 1996 |
|
RU2108933C1 |
| НАВЕСНАЯ ТРЕЛЕВОЧНАЯ ТЕЛЕЖКА | 2022 |
|
RU2785391C1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |

W
(
чэ -N
Јь СЛ О
15
Фиг,1
Изобретение относится к транспортному машиностроению и может быть использовано для перемещения объектов производства, например, оснащенных колесами, в частности при сборке агрегатов на автомобильной базе.
Целью изобретения является повышение надежности работы конвейера.
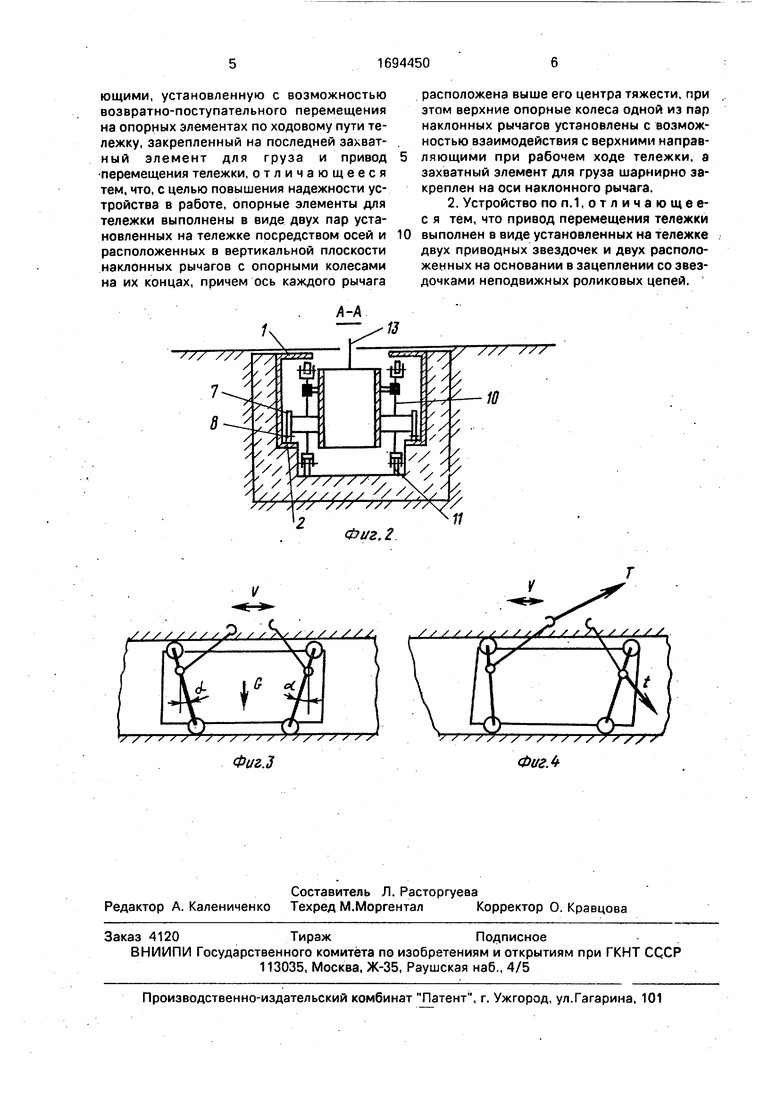
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - сечение А-А на фиг, 1; на фиг. 3 - устройство в режиме холостого перемещения (без нагрузки), схема работы; на фиг. 4 - устройство в режиме перемещения под тяговой нагрузкой, схема работы.
Устройство для перемещения груза, в частности колесных транспортных средств, содержит расположенный на основании ходовой путь с верхней 1 и нижней 2 направляющими, установленную с возможностью возвратно-поступательного перемещения на опорных элементах по ходовому пути тележку 3, корпус которой состоит из двух продольных вертикальных плит 4. Привод перемещения тележки выполнен в виде закрепленного между плит 4 электродвигателя 5, который через муфту соединен с червячным редуктором 6. На двух выходных шейках вала червячного редуктора б установлены две приводные звездочки 7, распо- ложенные в зацеплении с двумя смонтированными на основании неподвижными роликовыми цепями 8, размещенными в специальной бетонированной траншее. Опорные элементы для тележки 3 выполнены в виде двух пар установленных на тележке посредством осей 9 и расположенных в вертикальной плоскости наклонных опорных рычагов 10 с опорными колесами 11 на их концах, причем ось каждого рычага расположена выше его центра тяжести, при этом верхние опорные колеса 11 одной из пар наклонных рычагов 10 установлены с возможностью взаимодействия с верхними направляющими 1 ходового пути при рабочем ходе тележки. Рычаги 10 установлены под углом а, к вертикали, равном 6° ... 12°, Наклонное положение рычагов обеспечивается за счет наличия упоров 12. Опорные колеса 11 обрезинены по ободу. Захватные элементы для груза выполнены в виде шарнирно закрепленных на осях 9 рычагов 10 тяг 13 с крюками на концах, перемещение которых в вертикальной плоскости ограничено упорами 14, К крюкам может прицепляться тяговой трос, связанный с перемещаемым объектом (фиг. 1).
Общий размер Н рычага 10 больше размера h между верхней 1 и нижней 2 направляющими. Однако, при наклонном
положении рычага 10 под углом а верхние колеса не касаются верхних направляющих 1. Энергопитание двигателю подается по гибкому кабелю 15, подвешенному на натянутой проволоке.
Устройство работает следующим образом.
Перемещение устройства в обе стороны осуществляется благодаря сцеплению двух
0 звездочек 7 с роликовыми цепями 8, размещенными по обе стороны устройства.
Для обеспечения равномерности распределения усилий по обеим цепям последние на концах соединены по балансирной
5 схеме.
Устройство работает в двух режимах: холостое перемещение и перемещение под тяговой нагрузкой.
При режиме холостого перемещения
0 опорный рычаг 10 под действием силы тяжести G устройства занимает исходное положение под углом а (фиг. 3), при котором верхние колеса 11 не касаются направляющих 1 и движение устройства происходит по
5 обычной схеме на четырех нижних колесах 11.
При режиме перемещения под тяговой нагрузкой, когда к тяге 13 присоединен трос транспортируемого изделия, корпус тележ0 ки 3 под действием тягового усилия Т приподнимается и прижимает нагруженные опорные рычаги 10 колесами 11 и верхним направляющим 1 (фиг. 4). При этом нагруженные опорные рычаги 10 на осях 9 откло5 няются в сторону уменьшения угла а, благодаря чему происходит затягивание колес 11 между направляющими 1 и 2 Тем самым обеспечивается принудительный беззазорный контакт колес 11 обоих грузо0 несущих опорных рычагов 10 с верхней и нижней направляющими 1 и 2. Одновременно под действием усилия t, действующего в шарнире ненагруженного опорного рычага, последний продолжает оставаться внаклон5 ном положении с контактом только нижних колес с направляющими 2 (фиг. 4).
Таким образом, в режиме перемещения под тяговой нагрузкой устройство контактирует с направляющими тремя парами колес:
0 двумя парами со стороны нагруженных опорных рычагов и нижней парой ненагруженных опорных рычагов, что обеспечивает перемещение без толчков и вибраций, в результате чего надежность работы устройст5 ва достаточно высока.
Формула изобретения 1. Устройство для перемещения груза, содержащее расположенный на основании ходовой путь с верхней и нижней направляющими, установленную с возможностью возвратно-поступательного перемещения на опорных элементах по ходовому пути тележку, закрепленный на последней захватный элемент для груза и привод перемещения тележки, отличающееся тем, что, с целью повышения надежности устройства в работе, опорные элементы для тележки выполнены в виде двух пар установленных на тележке посредством осей и расположенных в вертикальной плоскости наклонных рычагов с опорными колесами на их концах, причем ось каждого рычага
А-А //J
/ / / / / /
/ / s /Sv /
/ / / /.
& а
/ / / г f / / S SS//////SSS
Фиг.З
расположена выше его центра тяжести, при этом верхние опорные колеса одной из пар наклонных рычагов установлены с возможностью взаимодействия с верхними направляющими при рабочем ходе тележки, а захватный элемент для груза шарнирно закреплен на оси наклонного рычага.
Фиг. 2
г /////// / / / S S/ /S
Фиг А
