Подвесные конвейеры, включающие в себя подвнжные по монорельсу, с помощью тяговой цепи, каретки с крюками для навешивания захватных нетель грузовых подвесок, снабженных траверсами со щтангами, поддерживаю цими грузонесущий орган, и с ходовыми колесами, подвижными по направляющим, размещенным параллельно монорельсу и имеющим наклонные концевые участки, способствующие выходу захватной петли подвески из зева крюка каретки, известны.
Недостаток таких конвейеров состоит в том, что они не обеспечивают прерывистого движения кареток, необходимого, например, для проведения технологических операций с транспортируемым грузом.
Для устранения этого недостатка предлагаемый конвейер выполнен с устройством для автоматического разобщения грузовой подвески с кареткой, которое состоит из подвижного в вертикальных направляющих траверсы подпружиненного ползуна, имеющего вертикальный паз для свободно поворотной в вертикальной плоскости захватной петли и несущего ось нажимного ролика, взаимодействующего с установленными вдоль трассы конвейера неподвижными или подъемно-опускными отклоняющими линейками.
Для обеспечения опускания грузонесзщего органа независимо от положения траверсы грузовой подвески, щтанга выполнена телескопической, причем нижний подвижной ее щток оборудован роликом, взаимодействующим с размещенными вдоль трассы конвейера направляющнми, отдельные участки которых выполнены подъемно-опускными с помощью силовых цилиндров.
Автоматическое управление конвейером по заранее заданной программе обеспечивается тем, что грузовые подвески выполнены с кулаками, взаимодействующими с рычагами установленных в соответствующих местах трассы конвейера автоматических выключателей.
№ 122067- 2 -.
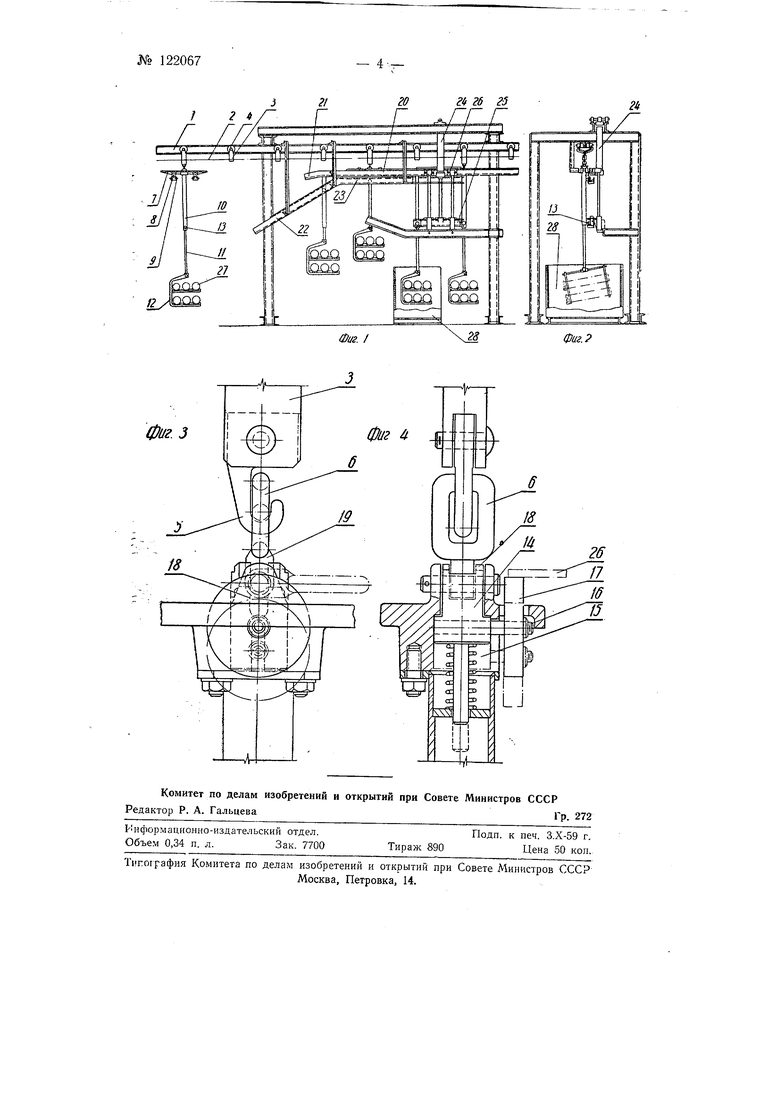
На фиг. 1 изображен подвесной конвейер в общем виде; на фиг. 2- то же, вид в торца; на фиг. 3 и 4 - устройство для автоматического разобщения грузовой подвески с кареткой, виды, соответственно, сбоку и с торца.
Конвейер состоит из монорельса 1, по которому с помощью тяговой цепи 2 перемешаются каретки, согтоящие из щек 3, в которых закреплены оси ходовых колес 4 и спабженпые крюками 5 для навещивания захватпых петель 6 грузовых подвесок, каждая из которых состоит из траверсы 7, оборудованной опорными ходовыми колесами 8 и направляющими роликами 9. К траверсе 7 прикренлена наружная секция 10 телескопической щтанги, внутренняя секция // которой несет щарнирно с ней сопряженный грузовой подхват 12. На внутренней секции // слюнтирован ролик 13, ось которого перемещается в прорези, предусмотренной в наружней секции 10. На каждой траверсе 7 размещено также устройство для автоматического разобщения грузовой подвески с кареткой. Это устройство включает в себя подвижной в вертикальных направляющих траверсы 7 ползун 14, удерживаемый в верхнем положении с помощью пружины 15 и имеющего расточку для оси 16 нажимного ролика 17. В ползуне 14 предусмотрен также паз 18 для жестко скрепленной с захватной петлей 6 серьги 19.
На участках, на которых проводятся технологические операции с транспортируемым конвейером грузом, параллельно трассе, конвейера размещены направляющие для ходовых колес 8 траверс 7 грузовых подвесок, состоящие из горизонтальных 20 и наклонных концевых участков 21. На этих же участках предусмотрены направляющие для роликов 13 щтанг подвесок. Эти направляющие состоят из закрепленных на опорной конструкции конвейера наклонных 22 и горизонтальных 23 участков и из подъемно-опускиых с помощью силовых цилиндров 24 участков 25.
Вдоль трассы конвейера размещены также неподвижные или подъемно-опускные с помощью приводного механизма отклоняющие линейки 26 для нажимных роликов.
Грузовые подвески оборудованы кулаками, взаимодействующими с рычагами, размещенными на трассе конвейера электрических выключателей, включенных в цепи управления приводными механизмами конвейера. Вдоль трассы конвейера на участке технологической обработки транспортируемых изделий 27 размещены ванны 28.
Вне участка, на котором осуществляются технологические операции с транспортируемыми изделиями, траверсы 7 грузовых подвесок подвешены к крюкам 5 каретоК; а грузовая подвеска находится в нижнем положении, на высоте, определяемой величиной максимального выдвижения внутренней секции // телескопической щтанги. При подходе к участку технологической операции ролики 13 подвески приходят в соприкосновение с наклонным участком 22 направляющей и перекатываются по последней, перемещаясь в прорезях наружной секции 10 телескопической штанги. Нри этом грузовой подхват 12 поднимается вверх. При дальнейщем перемещении каретки ходовые колеса 8 траверсы 7 вступают в соприкосновение с наклонным концевым участком 21 направляющих, за счет чего траверса 7 поднимается. При этом поднимается и захватная петля 6 в зеве крюка 5, освобождая последний от нагрузки. При этом петля 6 удерживается от поворота в вертикальной плоскости за счет того, что жестко скрепленная с ней серьга 19, находится в пазу 18 ползуна 14. Дальнейщее перемещение траверсы 7 с грузовой подвеской осуществляется за счет толкания петли 6 крюком 5. У места производства технологической операции каретка с подвесками подходит к подъемноог.ускной отклоняющей линейке 26. При этом размещенные на подвеске кулаки вступают во взаимодействие с рычагами соответствующих электрических выключателей, включенных в цепь управления приводом механизма подъема линейки 26. Последняя опускается, воздействуя на ролики 17. При этом ползун 14, преодолевая усилие пружины 15, опускается вниз, освобождая серьгу 19, которая совместно с захватной петлей 6 поворачивается в горизонтальное положение. Таким образом, траверсы 7 с грузовой подвеской оказываются полностью разобщенными с каретками, связанными друг с другом тяговой цепью 2.
Затем включаются силовые цилиндры 24, и участок 25 направляющей опускается вниз. При этом внутренняя секция 11 телескопической щтанги грузовой подвески также опускается, и подхваты 12 вместе с на ходящимися на них изделиями 27 погружаются в ванну 28. После выдержки изделий в ваннах вновь включаются силовые цилиндры 24 и подхваты 12 поднимаются. Затем отводится вверх отклоняющая линейка 26 и ползуны 14 под действием пружин /5 поднимаются. Кромки пазов 18 воздействуют на серьги 19, за счет чего последние совместно с захватными петлями 6 разворачиваются в вертикальное положение.
В таком положении траверсы могут перемещаться под воздействием крюков 5 кареток. При дальнейщем перемещении петли 6 садятся на крюки 5, воспринимающие нагрузку от веса подвески и изделий.
Предмет изобретения
1.Подвесной конвейер, включающий в себя подвижные по монорельсу, с помощью тяговой цепи, каретки с крюками для навешивания захватных петель грузовых подвесок, снабженных траверсами со щтангами, поддерживающими грузонесущий орган, и с ходовыми колесами, подвижными по направляющим, размещенным параллельно монорельсу и имеющим наклонные крнцевые участки, способствующие вьтходу захватной петли подвески из зева крюка каретки, отлич ающийся тем, что, с целью обеспечения прерывистого движения грузовых подвесок при непрерывном движении кареток, необходимого, например, для проведения технологических операций с транспортируемым грузом, он выполнен с устройством для автоматического разобщения грузовой подвески с кареткой.
2.Форма выполнения конвейера по п. 1, отличающаяся тем, что устройство для автоматического разобщения грузовой подвески с кареткой выполнено в виде подвижного в вертикальных направляющих траверсы подпружиненного п.олзуиа, имеющего вертикальный паз для свободно поворотной в вертикальной плоскости захватной петли и несущего ось нажимного ролика, взаимодействующего с установленными вдоль трассы конвейера неподвижными или подъемно-опускными отклоняющими линейками.
3.Форма выполнения подвесного конвейера по пп. 1-2, о т л ич а ющаяся тем, что, с целью обеспечения опускания грузонесущего органа независимо от положения траверсы грузовой подвески, штанга выполнена телескопической, причем нижний подвижной ее щток оборудован роликом, взаимодействующим с размещенными вдоль трассы конвейера направляющими, отдельные участки которых выполнены подъемно-опускными с помощью силовых цилиндров.
4.Форма выполнения подвесного конвейера по пп. 1-3, отличающаяся тем, что, с целью автоматического управления механизмами конвейера по заранее заданной программе, грузовые подвески выполнены с кулаками, взаимодействующими с рычагами установленных в соответствующих местах трассы конвейера электрических выключателей.
.№ 122067
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер | 1959 |
|
SU130404A1 |
| Подвесной конвейер с плоскопараллельным движением длинномерных грузов | 1950 |
|
SU89552A1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1969 |
|
SU239856A1 |
| ЯАТЕНТНО- -^'" | 1970 |
|
SU261986A1 |
| ПОДВЕСНОЙ НЕСУЩЕ-ТОЛКАЮЩИЙ КОНВЕЙЕР | 1965 |
|
SU167771A1 |
| Конвейер для передачи изделий от одного рабочего места к другому | 1960 |
|
SU138868A1 |
| Подвесной конвейер с плоскопараллельным движением длинномерных грузов | 1955 |
|
SU105959A2 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1969 |
|
SU239121A1 |
| Конвейер для передачи изделий от одного рабочего места к другому | 1961 |
|
SU144774A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕРвсгсо:ЗСНАЯ;;:::;';Е:1ш::^ .'ЕКА | 1970 |
|
SU284700A1 |