Фис J
Изобретение относится к силоизмери- тельной технике и может найти применение для измерения динамических сил в точках взаимодействия механических систем.
Цепь изобретения - расширение функциональных возможностей за счет измерения пространственного положения вектора динамической силы.
На фиг.1 показано устройство для измерения силы; на фиг.2,3 - устройство для измерения силы, вид сверху и сбоку,
Способ реализуют следующим образом.
0
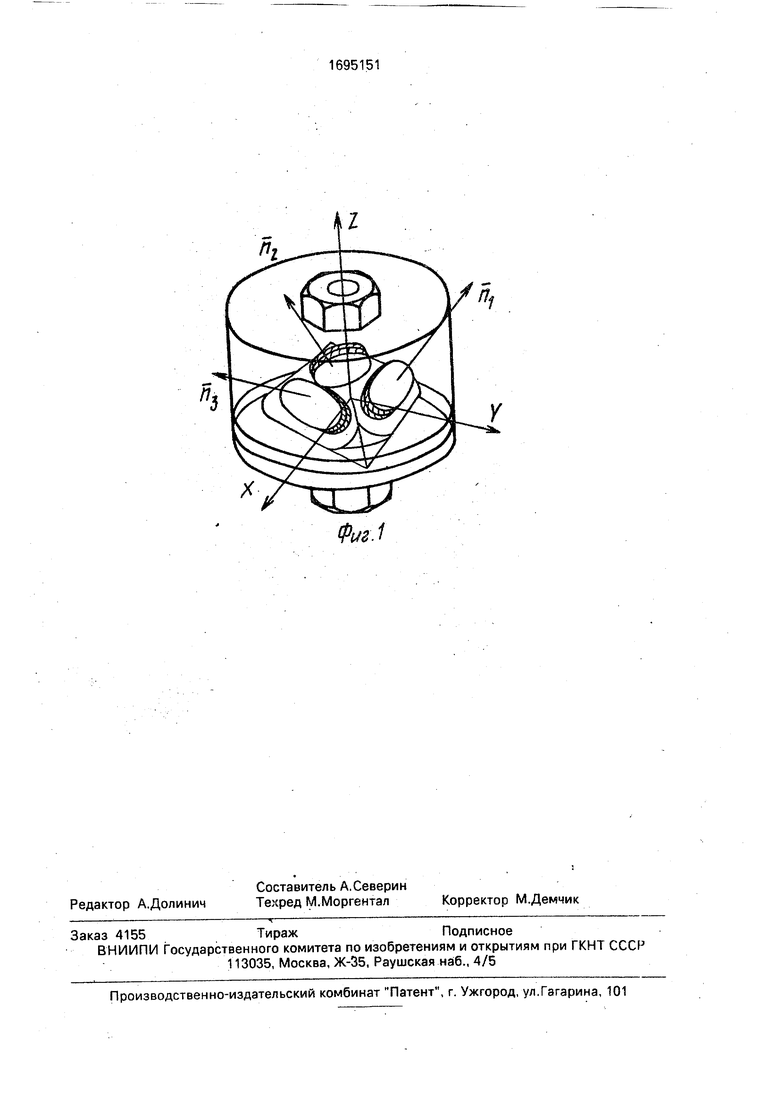
Между силовоспринимающими элементами устанавливают силомзмерительное устройство, состоящее из трех датчиков сил, воспринимающих динамическое воздействие со стороны нагружающих гзек и образующих нормалями к своим рабочим поверхностям трехмерный пространственный базис, измеряют амплитуды и фазы электрических сигналов, генерируемых чувствительными элементами каждого датчика силы, а величину модуля и фазы вектора динамической силы определяют по формуле
15
Fo YF ох F OY + F DZ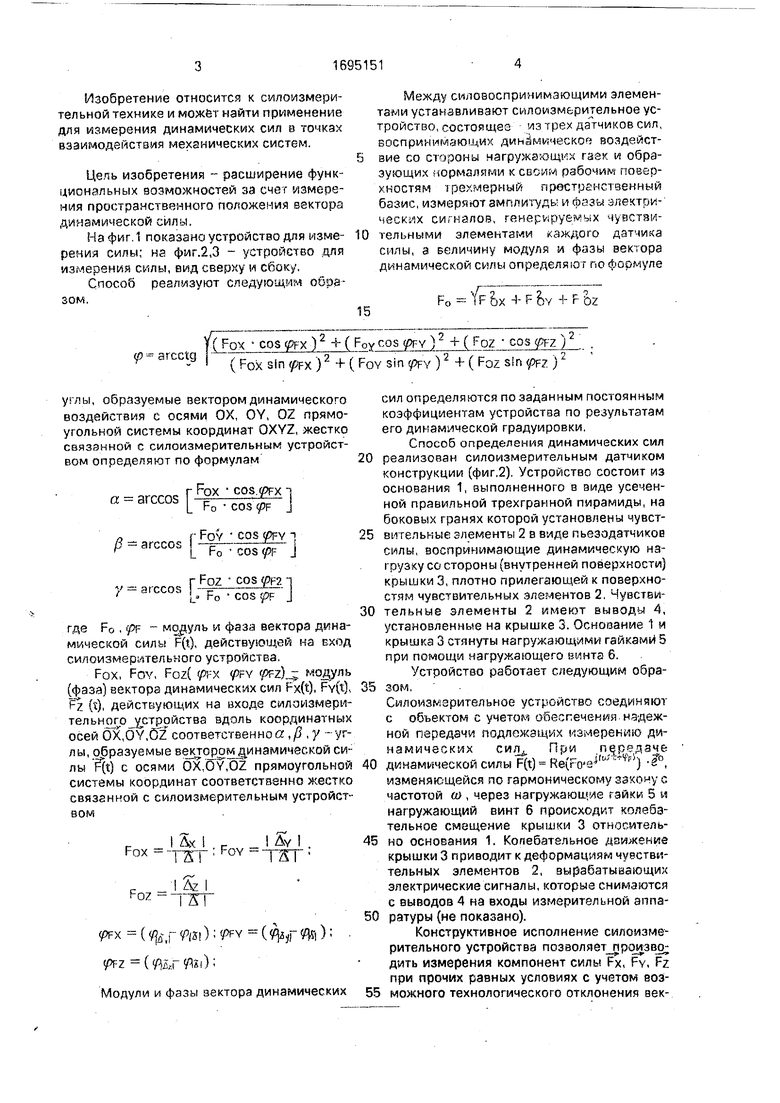
Изобретение относится к силоизмери- тельной технике и может быть использовано для измерения динамических сил в механических системах. Целью изобретения является расширение функциональных возможностей за счет измерения пространственного положения вектора динамической силы, Цель достигается тем, что между сило- воспринимающими элементами устанавливают три пьезодатчика силы, образующих нормалями к силовоспринимающим поверхностям трехмерный пространственный базис, измеряют амплитуды и фазы сигналов датчиков и по ним определяют вектор динамической силы Сила прикладывается к силовоспринимающим элементам, выполненным в виде основания I и крышки 3, причем внутренняя поверхность крышки и наружная поверхность основания выполнены в виде расположенных соосно правильных усеченных трехгранных пирамид, между которыми закреплены датчики 3 силы, при этом угол наклона боковых граней пирамид к плоскости основания выбирается в зависимости от угла, характеризующего возможное технологическое отклонение вектора максимальной чувствительности датчика силы от нормали и силсвоспрмни- мающей поверхности. 2 с.п.ф-лы, 3 ил. -А (Л
Y( FQX cos (prx )2 -f ( Foy cos ffFV)2 + ( FQZ cos pn )2 -S (Fox sin )2 + ( FOY sin PFY )2 + ( FOZ sin )2
f arcctg
углы, образуемые вектором динамического воздействия с осями OX, OY, OZ прямоугольной системы координат OXYZ, жестко связанной с силоизмерительным устройством определяют по формулам
„ ягггп. г FQX COS..PFX -j а - arccos FQ . CQS j
0г FOY cos «JFY т
1- arccos Fo . cos Ј J
Г FoZ COS №. 1 arcCQS :Fo-cosЈr
где FO , p - модуль и фаза вектора динамической силы F(t), действующей на вход силоизмерательного устройства,
Fox, FOY, Foz( /JFZ); модуль (фаза) вектора динамических сил Fx(t), FY(I) Fz (t), действующих на «ходе смлоизмери- тельно грустройства вдоль координатных осей 6X,OY,OZ соответственное; ,/S , у -углы, образуемые вещор мдинамической силы F(t) с осями OX.(JY,OZ прямоугольной системы координат соответственно жестко связанной с силоизмерительным устройством
-JJkl.,JjVi.
тал
f ; FOY
сI & I
Foz - -Tsr
()(,,); .
(r№i):
Модули и фазы вектора динамических
сил определяются по заданным постоянным коэффициентам устройства по результатам его динамической градуировки.
Способ определения динамических сил
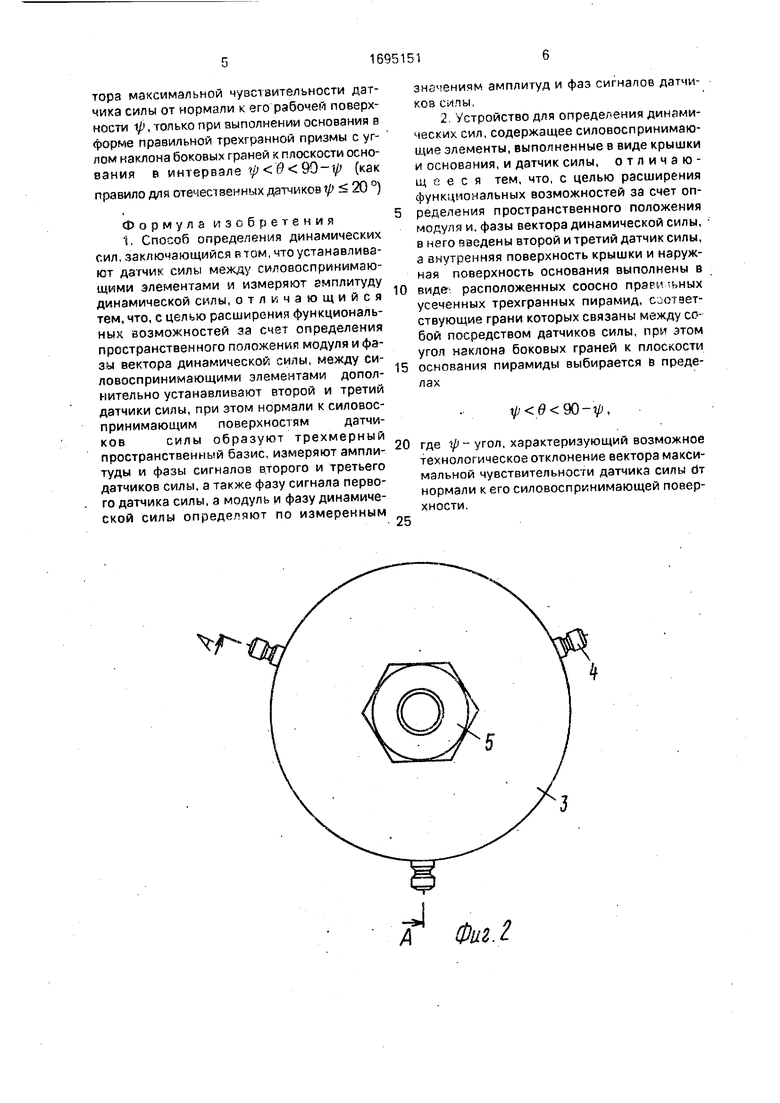
реализован силоизмерительным датчиком конструкции (фиг.2). Устройство состоит из основания 1, выполненного в виде усеченной правильной трехгранной пирамиды, на боковых гранях которой установлены чувствитальные элементы 2 в виде пьезодатчиков силы, воспринимающие динамическую нагрузку со стороны {внутренней поверхности) крышки 3, плотно прилегающей к поверхностям чувствительных элементов 2, Чувстеительные элементы 2 имеют выводы А, установленные на крышке 3. Основание 1 и крышка 3 стянуты нагружающими гайками 5 при помощи нагружающего винта 6.
Устройство работает следующим образом,
Силомзмэрительное устройство соединяют с объектом с учетом обеспечения надежной передача подлежащих измерению динамических сил При .
динамической силы F(t) ReCFr/e 1) -1°, изменяющейся по гармоническому закону с частотой о) , через нагружающие гайки 5 и нагружающий винт 6 происходит колебательное смещение крышки 3 относительно основания 1. Колебательное движение крышки 3 приводит к деформациям чувствительных элементов 2, вырабатывающих электрические сигналы, которые снимаются с выводов 4 на входы измерительной аппаратуры (не показано).
Конструктивное исполнение силоизме- рительного устройства позволяет прои.зво; дить измерения компонент силы Fx, FY, FZ при прочих равных условиях с учетом возможного технологического отклонения вектора максимальной чувствительности датчика силы от нормали к его рабочей поверхности j), только при выполнении основания в форме правильной трехгранной призмы с углом наклона боковых граней к плоскости основания в интервале (как правило для отечественных датчиков ty 20 °)
Формула изобретения 1, Способ определения динамических сил, заключающийся к том, что устанавливают датчик силы между силовоспринимаю- щими элементами и измеряют амплитуду динамической силы, отличающийся тем, что, с целью расширения функциональных возможностей за счет определения пространственного положения модуля и фазы вектора динамической силы, между си- ловоспринимающими элементами дополнительно устанавливают второй и третий датчики силы, при этом нормали к силовос- принимающим поверхностям датчиковсилы образуют трехмерный пространственный базис, измеряют амплитуды и фазы сигналов второго и третьего датчиков силы, а также фазу сигнала первого датчика силы, а модуль и фазу динамической силы определяют по измеренным
V-0
5
0
значениям амплитуд и фаз сигналов датчиков силы,
)-1р,
где ty- угол, характеризующий возможное технологическое отклонение вектора максимальной чувствительности датчика силы dT нормали к его силовоспркнимающей поверхности.
25
з
Г Фиг.2
i
п
X
Ри.1
| В.И.Полков | |||
| Виброакустическая диагностика и снижение виброактивности судовых механизмов | |||
| Л.: Судостроение, 1974, с.40 | |||
| Вибрации в науке и технике | |||
| Справочник | |||
| М.: Машиностроение, 1981, т.5, гл.9. |
