Изобретение относится к машиностроению, а именно к устройствам для фиксации резьбовых соединений от проворачивания, и может быть использовано при сборке изделий, в которых детали скрепляют много- болтовыми соединениями с применением подвесных завинчивающих гайковертов.
Цель изобретения - повышение производительности за счет применения подвижного шарикового захвата.
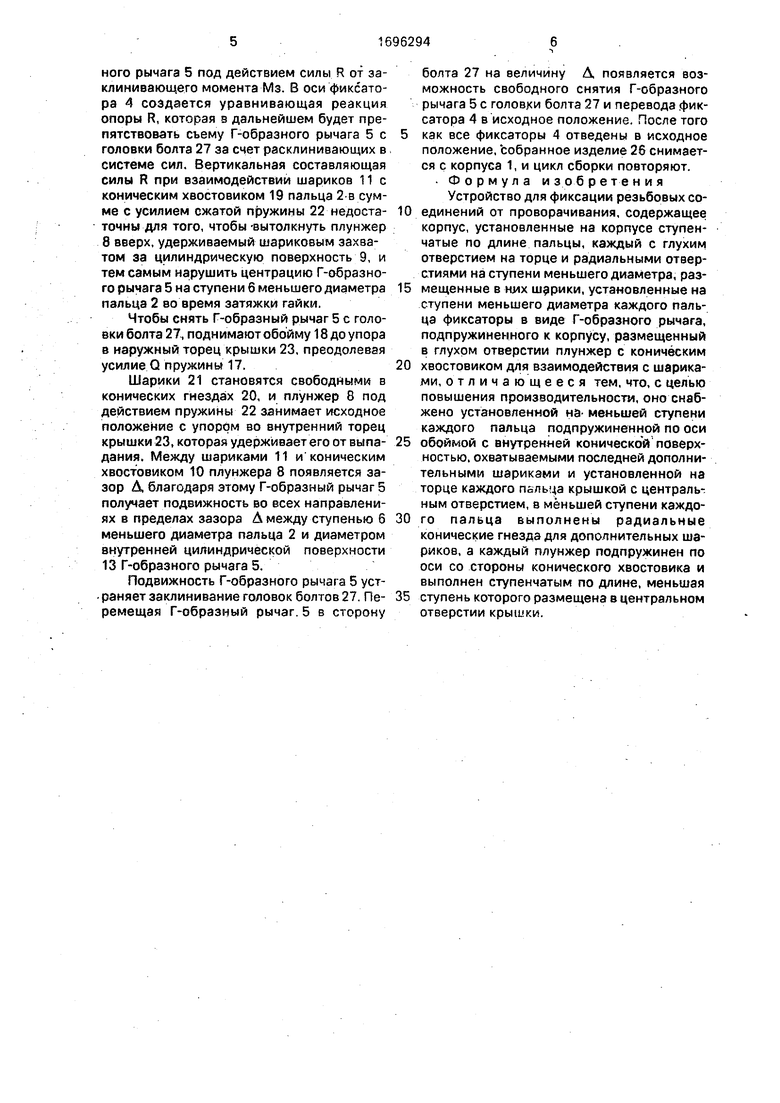
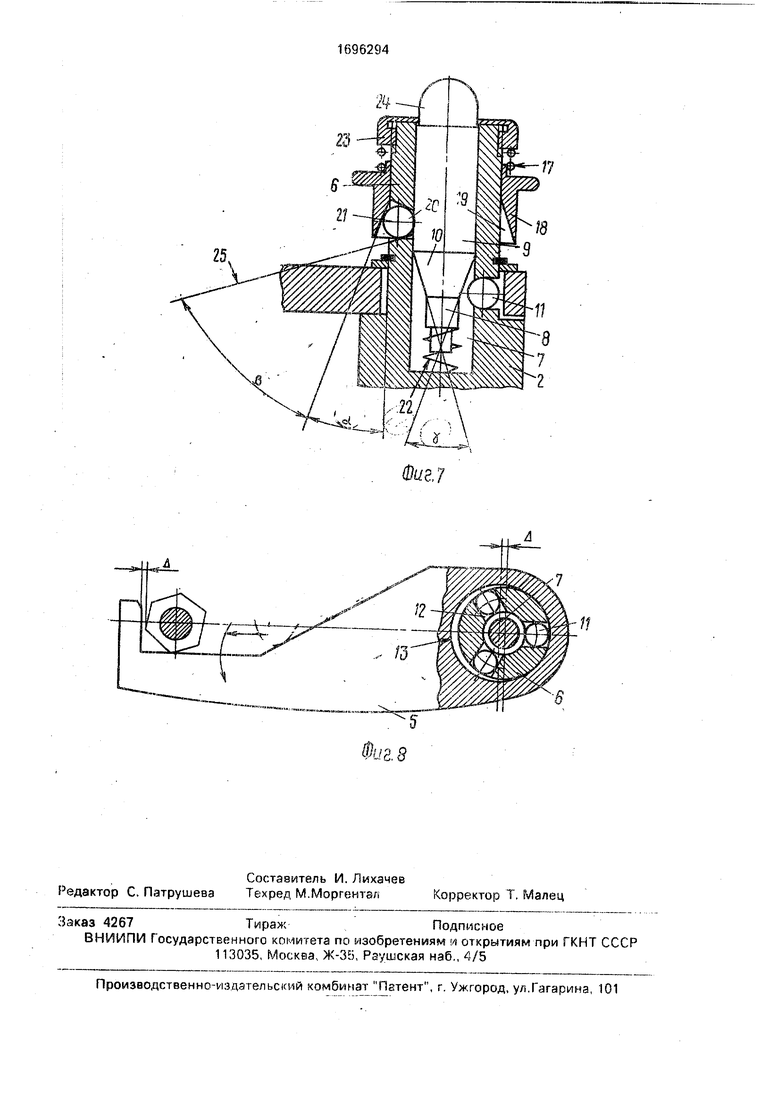
На фиг.1 изображено устройство, общий вид; на фиг.2 - фиксатор в момент предварительной ориентации по граням болта; на фиг.З - разрез А-А на фиг.2; на фиг.4 - -разрез Б-Б на фиг.З; на фиг.5 - фиксатор в момент начальной разгрузки; на фиг.6 - разрез В-В на фиг.З; на фиг.7 - фиксатор в момент окончательной разгрузки; на фиг.8 - фиксатор в момент съема с головки болта.
Устройство для фиксации резьбовых соединений от проворачивания содержит корпус 1 с установленными на нем ступенчатыми подлине пальцами 2 с размещенными на каждом поджатыми относи- тельно оси пружиной 3 с фиксаторами 4, выполненными в виде Г-образных рычагов 5.
Каждый рычаг 5 установлен с зазором А на ступени 6 меньшего диаметра пальца 2, выполненного на торце с глухим отверстием 7, в которое установлен ступенчатый по длине плунжер 8 с цилиндрической поверхностью 9 и коническим хвостовиком 10 для взаимодействия с тремя шариками 11, установленными в радиальных отверстиях 12 ступени б меньшего диаметра пальца 2 с возможностью контакта с внутренней цилиндрической поверхностью 13 Г-образно- го рычага 5. На ступени 14 большего диаметра каждого пальца 2 перпендикулярно его оси на боковой поверхности выполнен паз 15, в котором размещена пружина 16, закрепленная одним концом на рычаге 5, а другим на корпусе 1.
На каждом пальце 2 на ступени 6 меньшего диаметра установлена поджатая пружиной 17 обойма 18 с внутренней конической поверхностью 19.
В конических гнездах 20 ступени мень- шего диаметра пальца 2 установлены три шарика 21, образующие с внутренней конической поверхностью 19 обоймы 16 подвижный шариковый захват плунжера 8, поджатого относительно пальца 2 пружи- ной 22. Для удержания плунжера 8 от выпадания по ступени 6 меньшего диаметра пальца 2 установлена крышка 23, а сам плунжер 8 выполнен ступенчатыми по длине
и ступенью 24 меньшего диаметра установлен в отверстии крышки 23.
Для работы фиксатора 4 необходимо следующее. Угол у, образованный коническим хвостовиком 10 плунжера 8, оптимально составляет два угла самоторможения. Угол а, образованный конической поверхностью 19 обоймы 18, оптимально равен углу самоторможения. Угол /3, образованный конической поверхностью 19 обоймы 18 и образующей 25 конического гнезда 20 ступени 6 меньшего диаметра пальца 2, составляет два угла самоторможения.
Устройство работает следующим образом,
Изделие 26 с болтом 27, установленным головкой вниз, базируют на поверхности корпуса 1. Затем плунжер 8 вручную устанавливается в глухое отверстие 7 пальца 2 до упора, преодолевая при этом сопротивление пружины 22 и трение между шариками 21 и образующей 25 конического гнезда 20. Заклинивание плунжера 8 не происходит, так как шарики 21 обкатываются по конической поверхности 19 обоймы 18, тем самым перемещая ее в сторону, противоположную движению плунжера 8, и сжимая пружину 17. При движении плунжера 8 шарики 11 разводятся в радиальных отверстиях 12 под действием конического хвостовика 10 плунжера 8 до контакта с внутренней цилиндрической поверхностью 13 Г-образного рычага 5.
Диаметры конического хвостовика 16 плунжера В. шариков 11 и цилиндрической поверхности 13 подобраны так, что натяга между ними че создается, а лишь происходит центрация Г-образного рычага 5 на ступени 6 меньшего диаметра пальца 2.
Затем Г-образный рычаг 5 переводится в рабочее положение в сторону к головке болта 27, преодолевая усилие пружины 16, которая при переходе через центр пальца 2 придает Г-образному рычагу 5 прижимающий момент Мпр.
В зависимости от положения грани болта 17 Г-образный рычаг 5 может сориентироваться по грани болта 27, а может и не сорие нтиро ваться.
В случае непопадания Г-образного рычага 5 на грань болта 27 после того как наживят гайки (не показаны) и будут производить их затяжку с данным крутящим моментом за счет поворота головки болта 27 под действием заклинивающего момента М3 и момента МПр пружины 16, произойдет ориентация Г-образного рычага 5 по грани болта 27. При дальнейшем повороте головки болта 27 происходит заклинивание Г-образного рычага 5 под действием силы R от заклинивающего момента Мз, В оси фиксатора 4 создается уравнивающая реакция опоры R, которая в дальнейшем будет препятствовать съему Г-образного рычага 5 с головки болта 27 за счет расклинивающих в системе сил. Вертикальная составляющая силы R при взаимодействии шариков 11 с коническим хвостовиком 19 пальца 2 в сумме с усилием сжатой пружины 22 недостаточны для того, чтобы -вытолкнуть плунжер 8 вверх, удерживаемый шариковым захватом за цилиндрическую поверхность 9, и тем самым нарушить центрацию Г-образного рычага 5 на ступени 6 меньшего диаметра пальца 2 во время затяжки гайки.
Чтобы снять Г-образный рычаг 5 с головки болта 27, поднимают обойму 18 до упора в наружный торец крышки 23, преодолевая усилие Q пружины 17.
Шарики 21 становятся свободными в конических гнездах 20, и плунжер 8 под действием пружины 22 занимает исходное положение с упором во внутренний торец крышки 23, которая удерживает его от выпадания. Между шариками 11 и коническим хвостовиком 10 плунжера 8 появляется зазор Л благодаря этому Г-образный рычаг 5 получает подвижность во всех направлениях в пределах зазора Д между ступенью 6 меньшего диаметра пальца 2 и диаметром внутренней цилиндрической поверхности 13 Г-образного рычага 5.
Подвижность Г-образного рычага 5 уст- . раняет заклинивание головок болтов 27, Перемещая Г-образный рычаг. 5 в сторону
болта 27 на величину Д, появляется возможность свободного снятия Г-образного рычага 5 с головки болта 27 и перевода фиксатора 4 в исходное положение. После того
как все фиксаторы 4 отведены в исходное положение, собранное изделие 26 снимается с корпуса 1, и цикл сборки повторяют. Формула изобретения Устройство для фиксации резьбовых соединений от проворачивания, содержащее корпус, установленные на корпусе ступенчатые по длине пальцы, каждый с глухим отверстием на торце и радиальными отверстиями на ступени меньшего диаметра, размещенные в них шарики, установленные на ступени меньшего диаметра каждого пальца фиксаторы в виде Г-образного рычага, подпружиненного к корпусу, размещенный в глухом отверстии плунжер с коническим
хвостовиком для взаимодействия с шариками, отличающееся тем, что, с целью повышения производительности, оно снабжено установленной на- меньшей ступени каждого пальца подпружиненной по оси
обоймой с внутренней конической поверхностью, охватываемыми последней дополнительными шариками и установленной на торце каждого паль да крышкой с центральным отверстием, в меньшей ступени каждого пальца выполнены радиальные конические гнезда для дополнительных шариков, а каждый плунжер подпружинен по оси со стороны конического хвостовика и выполнен ступенчатым по длине, меньшая
ступень которого размещена в центральном отверстии крышки.
26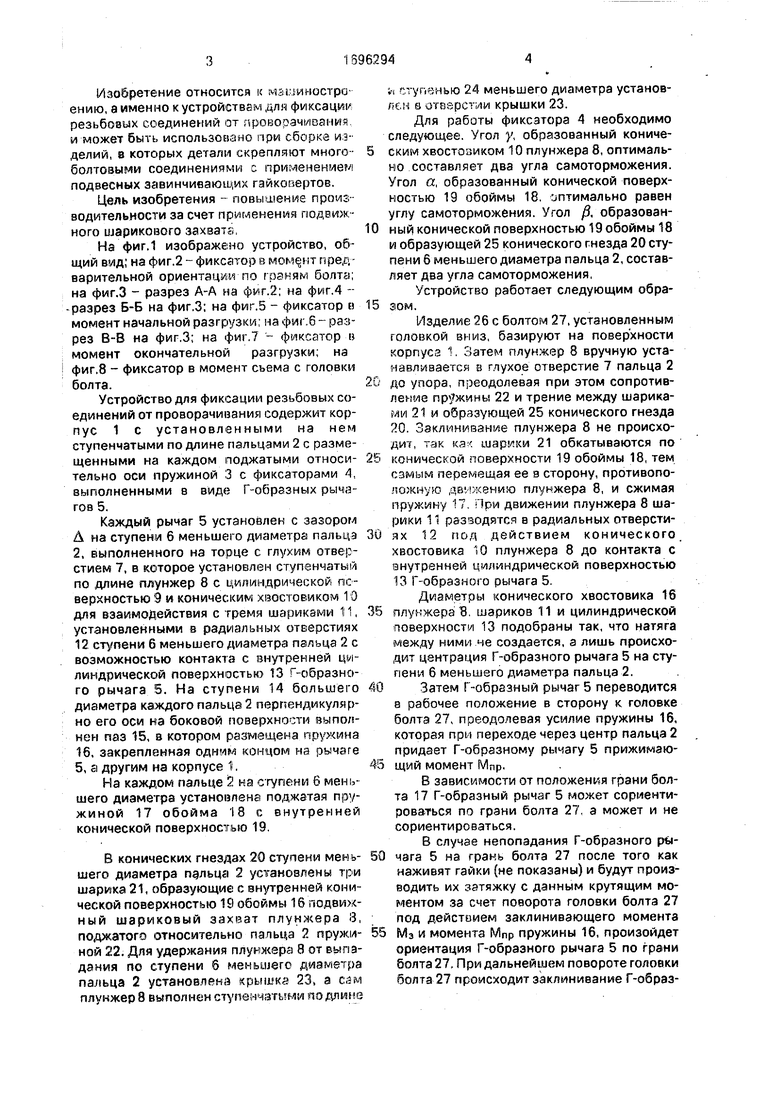
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для фиксации резьбовых соединений от проворачивания | 1990 |
|
SU1781023A1 |
| Устройство для фиксации крепежных изделий от проворачивания | 1989 |
|
SU1625677A1 |
| ТАКЕЛАЖНЫЙ УЗЕЛ | 2003 |
|
RU2245835C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ ОТДЕЛЯЕМЫХ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ ЧАСТЕЙ ИЗДЕЛИЯ ОТ КОРПУСА | 2006 |
|
RU2304236C1 |
| Резцовая головка | 1989 |
|
SU1808482A1 |
| Резцовая головка | 1989 |
|
SU1785836A1 |
| Автомотический поводковый патрон | 1986 |
|
SU1388197A1 |
| Автоматический поводковый патрон | 1979 |
|
SU829349A2 |
| МАШИНКА ДЛЯ СТРИЖКИ ЖИВОТНЫХ | 2005 |
|
RU2293648C2 |
| Механизм расфиксации зацепляющего штыря имитатора отрывной платы | 2017 |
|
RU2681803C2 |
Изобретение относится к машиностроению, а именно к устройствам для фиксации резьбовых соединений от проворачивания. Целью изобретения является повышение производительности за счет применения подвижного шарикового захвата. Изделие 26 с болтом 27 базируют на поверхности корпуса 1. Затем плунжер 8 вручную устанавливают в глухое отверстие 7 пальца 2 до 2В упора. Заклинивание плунжера 8 не происходит, так как шарики 21 обкатываются по конической поверхности 19 обоймы 18, тем самым перемещая ее в сторону. Затяжку производят с требуемым крутящим моментом. За счет поворота головки болта 27 под действием заклинивающего момента Мз и момента пружины Млр 16 происходит ориентация Г-оБразного рычага по грани болта 27. При дальпейшеь повороте головки болта 27 происходит заклинивание Г-образного рычага под действием силы Р и момента М3. В оси фиксатора 4 создается уравнивающая реакция опоры R, которая будет препятствовать съему Г-образиого рычага 5 с головки болта 27, Вертикальная составляющая R при взаимодействии шариков 11 с коническим хвостовиком 10 пальца 2 в сумме с усилием сжатой пружины 22 недостаточны для того, чтобы вытолкнуть плунжер 8 вверх, удерживаемый шариковым захватом за цилиндрическую поверхность 9 плунжера 8, и тем самым нарушить центрацию Г-образного рычага 5 на ступени 6 меньшего диаметра пальца 2 во время затяжки гайки. 8 ил. 1-4 ФигЗ
Фиг.1
Фиа2
23
fe4
2V
Фиг 5
23
25
Фиг.7
8
Фиг. 8
| Устройство для фиксации крепежных изделий от проворачивания | 1984 |
|
SU1207742A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для фиксации крепежных изделий от проворачивания | 1989 |
|
SU1625677A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
