Изобретение относится к машиностроению и может использоваться в трансмиссиях транспортных средств.
Цель изобретения - упрощение конструкции и повышение ее надежности.
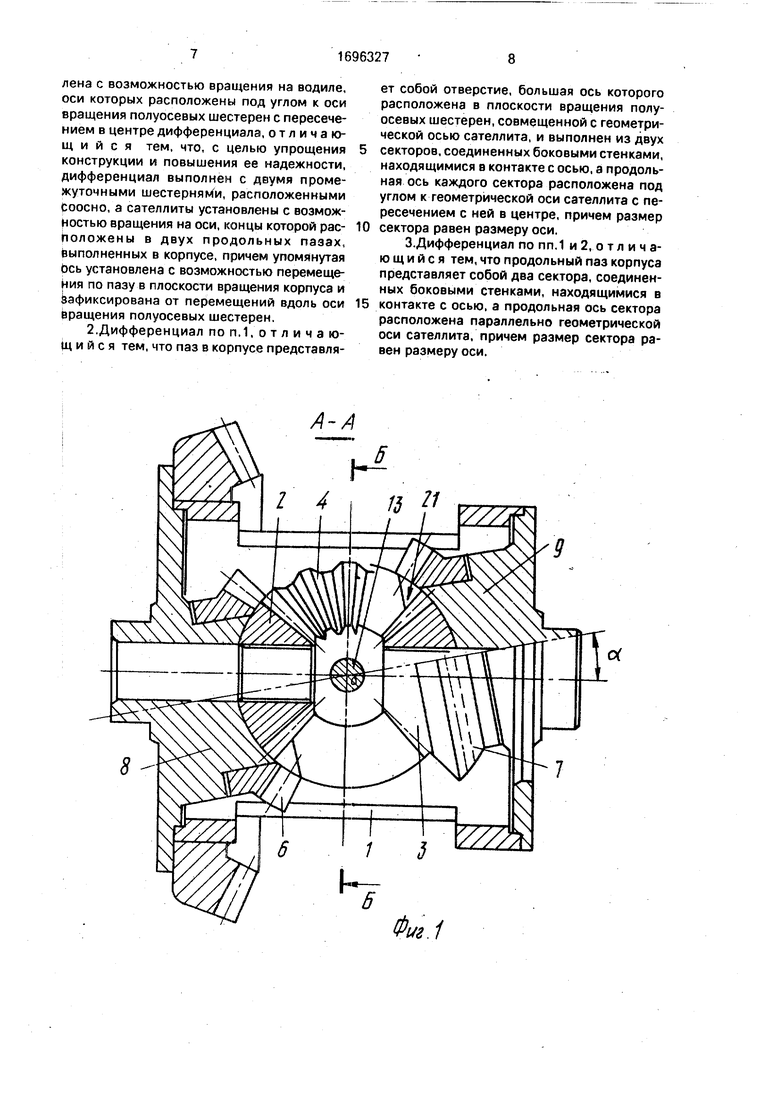
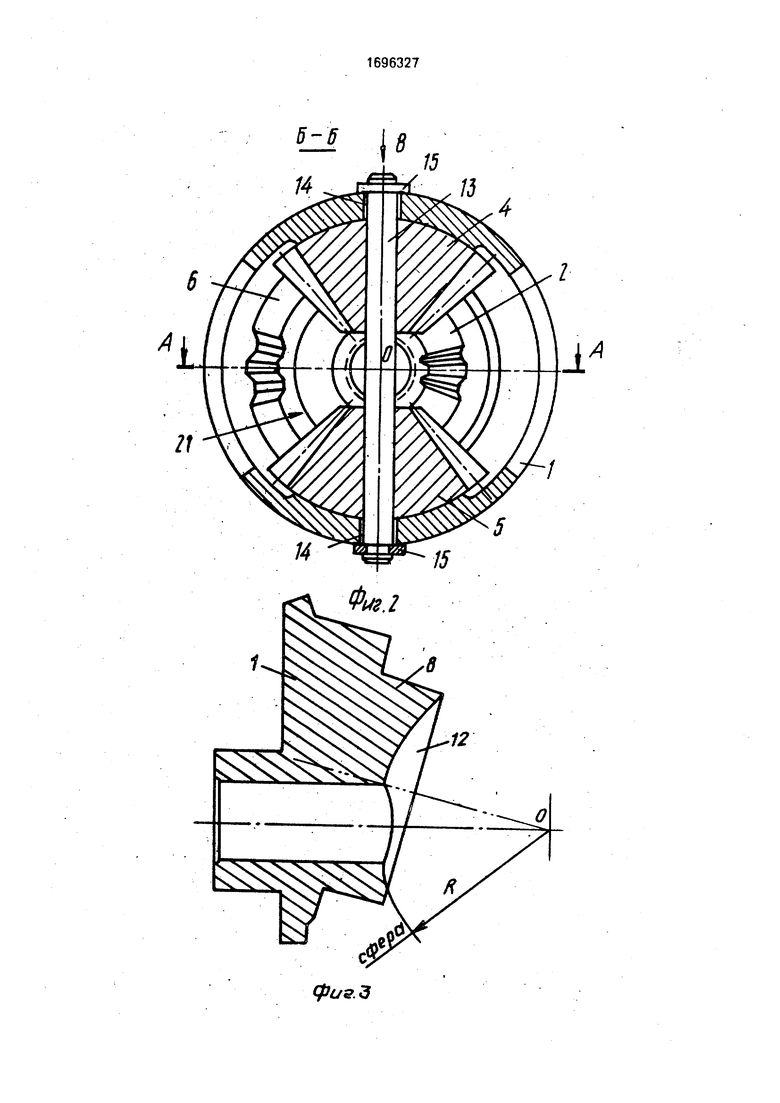
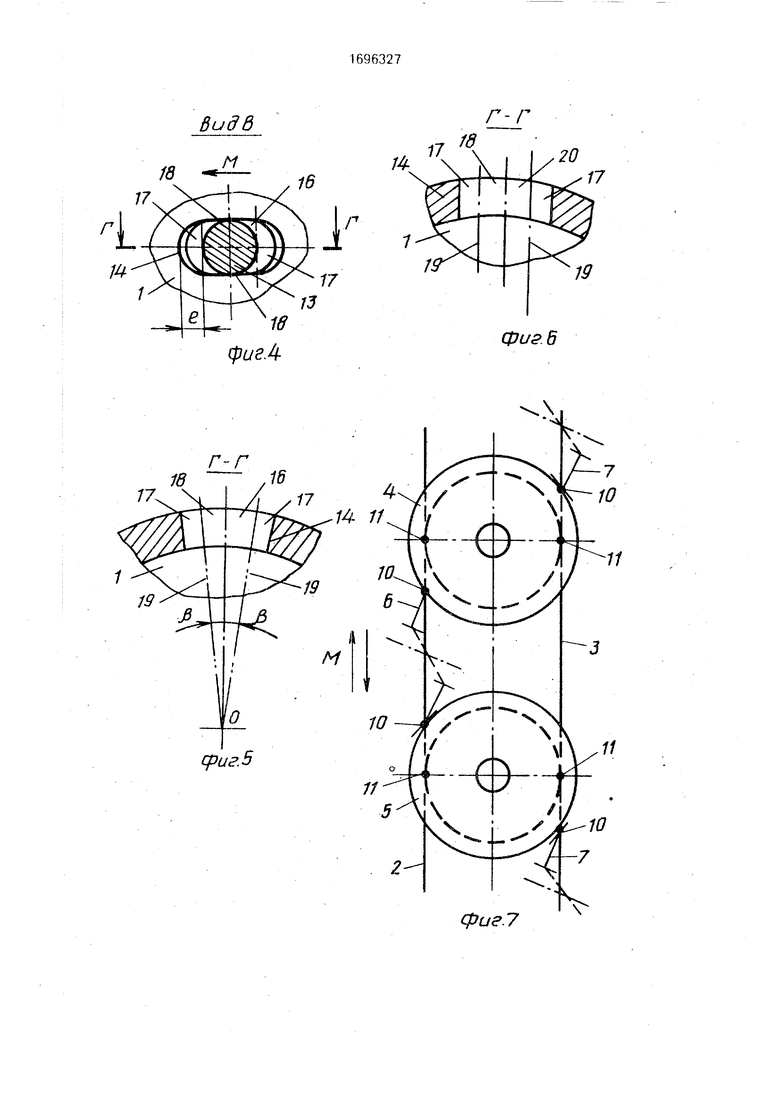
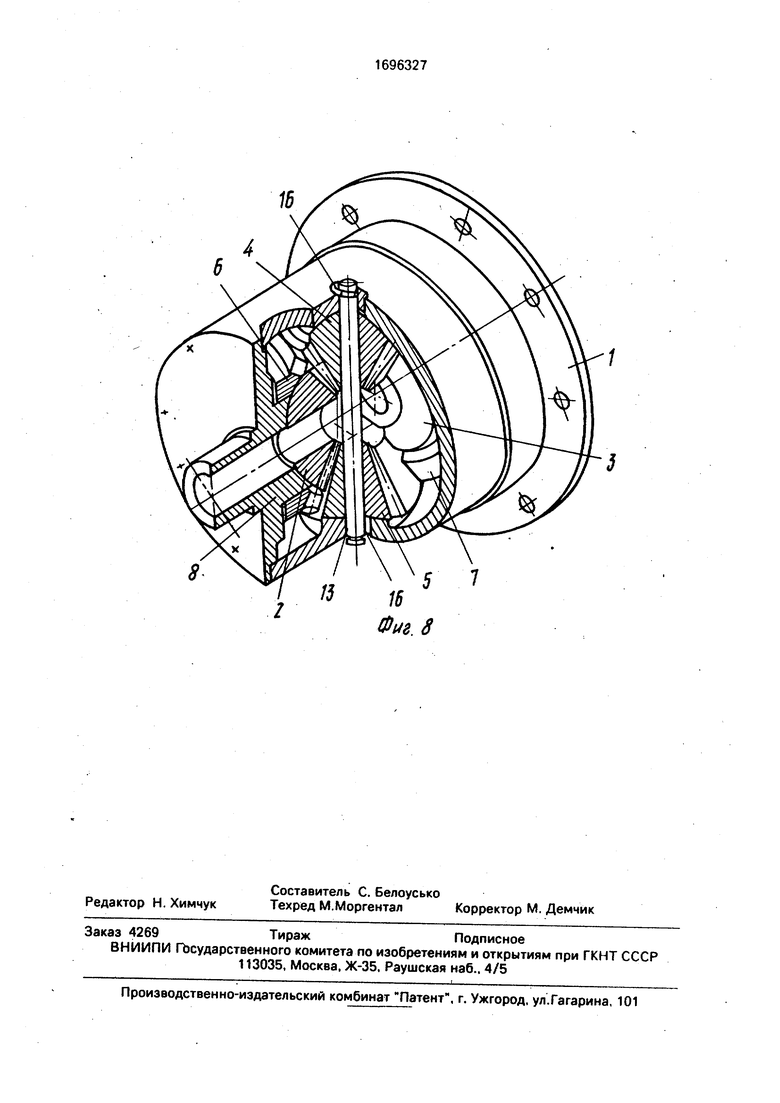
На фиг.1 - самоблокирующийся дифференциал, сечение А-А на фиг.2; на фиг.2 - сечение Б-Б на фиг.1; на фиг.З - ступица, сечение; на фиг.4 - вид В на фиг.2; на фиг.5 - корпус, сечение Г-Г на фиг.4; на фиг.6 - то же, вариант выполнения; на фиг.7 - кинематическая схема взаимодействия элементов дифференциала; на фиг.З - дифференциал, аксонометрия.
Самоблокирующийся дифференциал транспортного средства содержит установленные в корпусе 1 взаимосвязанные между
собой полуосевые шестерни 2 и 3, сателлиты 4 и 5, промежуточные шестерни 6 и 7 и кинематически связанное с корпусом 1 водило.
Водило выполнено в виде двух осей, представляющих собой закрепленные в корпусе 1 соосно две ступицы 8 и 9. Продольные оси ступиц 8 и 9 совмещены и пересекаются в центре 0 дифференциала (фиг.1 и 2) под углом а к оси вращения полуосевых шестерен 2 и 3. Плоскость, в которой расположены продольные оси ступиц 8 и 9, и ось вращения полуосевых шестерен 2 и 3 пересекается в центре 0 дифференциала с геометрической осью сателлитов 4 и 5 под прямым углом. На каждой ступице 8 и 9 с возможностью вращения установлены проО
о о
00
ю VJ
межуточные шестерни 6 и 7 соответственно. Промежуточные шестерни 6 и 7 введены в зацепление с двумя диаметрально расположенными сателлитами 4 и 5 и соприкасаются с ними в точке 10 контакта (фиг. 1,2 и 7). Сателлиты 4 и 5 находятся в зацеплении с двумя полуосевыми шестернями 2 и 3. Контакт полуосевых шестерен 2 и 3 с сателлитом 4 и 5 осуществляется в полюсе 11 зацепления их зубьев.
На радиальной поверхности ступиц 8 и 9 выполнена сферическая поверхность 12 (фиг.З) с радиусом, расположенным в центре 0 дифференциала. Сферическая поверхность 12 соответствует сферической поверхности торца полуосевых шестерен 2 и 3 и находится с ними в контакте.
Сателлиты 4 и 5 установлены, с возможностью вращения, на оси 13, концы которой установлены с возможностью перемещения в отверстии 14 корпуса 1. Для предотвращения от осевого перемещения оси 13 относительно корпуса 1 на ней установлены шайбы 15. Может быть и другое крепление оси от осевого перемещения. Продольная ось оси 13 совмещена с геометрической осью сателлитов 4 и 5. Отверстие 14 выполнено таких размеров, что между отверстием 14 корпуса 1 и осью 13 имеется гарантированный зазор I в плоскости вращения полуосевых шестерен 2 и 3, совмещенной с геометрической осью 4 и 5. Зазор I выполнен большим или равным зазору в зацеплении зубьев сателлитов 4 и 5 с промежуточными шестернями 6 и 7.
Отверстие 14 корпуса 1 представляет собой продольный паз 16 (фиг.4 и 5), большая ось которого расположена в плоскости вращения полуосевых шестерен 2 и 3, совмещенной с геометрической осью сателлитов 4 и 5 и состоит из двух одинаковых секторов 17, соединенных боковыми стенками 18. Боковые стенки 18 находятся в контакте с осью 13. Продольная ось 19 сектора 17 расположена под углом геометрической оси сателлитов 4 и 5 и пересекается с ней в центре 0 дифференциала, причем размер сектора 17 равен размеру оси 13.
В варианте выполнения на фиг.6 отверстие 14 корпуса 1 представляет собой продольный паз 20, состоящий из двух секторов 17, соединенных боковыми стенками 18, находящимися в контакте с осью 13. Продольная ось 19 сектора 17 расположена параллельно геометрической оси сателлитов 4 и 5, причем размеры сектора 17 равны размеру оси 13.
Зацепление промежуточных шестерен 6 и 7 с сателлитами 4 и 5 соответственно
выполнено таким образом, что проекция точки 10 контакта промежуточных шестерен 6 и 7 с сателлитами 4 и 5 на плоскость, совмещенную с осью вращения полуосевых
шестерен 2 и 3 и геометрической осью сателлитов 4 и 5 расположена от геометрической оси сателлитов 4 и 5 на расстоянии, равном или большем положения полюса 11 зацепления зубьев полуосевых шестерен 2
и 3 с сателлитами 4 и 5 относительно геометрической оси сателлитов 4 и 5, расположенной в этой же плоскости (фиг.8).
Торцовая поверхность 21 промежуточных шестерен 6 и 7 со стороны полуосевых
5 шестерен 2 и 3 (фиг.1) выполнена сферической с радиусом, расположенным в центре О дифференциала и соответствует или радиусом больше сферической поверхности торца полуосевых шестерен 2 и 3.
0 На фиг.7 изображена кинематическая схема взаимодействия элементов дифференциала, в частности полуосевых шестерен 2 и 3, сателлитов 4 и 5 промежуточных шестерен 6 и 7. На схеме показаны точка 10
5 контакта промежуточных шестерен 6 и 7 с сателлитами 4 и 5, к которым приложена сила Ро - составляющая крутящего момента трансмиссии и полюс 11 зацепления зубьев полуосевых шестерен 2 и 3 с сателлитами 4
0 и 5. к которым приложена сила Р« - составляющая момента сопротивления качению.
Конструктивное выполнение дифференциала в аксонометрии (фиг.8) позволяет оценить компоновку технического решения.
5 Самоблокирующийся дифференциал транспортного средства работает следующим образом.
При движении транспортного средства крутящий момент трансмиссии приложен к
0 корпусу 1 дифференциала. Под действием этого крутящего момента корпус 1 вместе со ступицами 8 и 9, промежуточными шестернями 6 и 7 повернутся на некоторый угол и, выбирая зазор между промежуточными ше
5 стернями 6 и 7 с сателлитами 4 и 5, вводит их зубья в зацепление в точках 10 контакта. При этом между корпусом 1 и осью 13 сохраняется гарантированный зазор в плоскости вращения корпуса 1.
0 В этом случае силовая составляющая крутящего момента трансмиссии сила Ро приложена к сателлитам 4 и 5 через две ступицы 8 и 9, две промежуточные шестерни 6 и 7 в двух точках 10 контакта с сателлитами
5 4 и 5.
Одна составляющая силы Р0 - сила Р1о через промежуточную шестерню 6 приложена к сателлиту 4 в точке 10 контакта и действует в плоскости вращения полуосевой шестерни 2, совмещенной с полюсом 11 зацепления зубьев полуосевой шестерни 2 и сателлита 4.
Другая составляющая силы Р0 - сила Р02 через промежуточную шестерню 7 приложена к сателлиту 5 в точке 10 их контакта и действует в плоскости вращения полуосевой шестерни 3, совмещенной с полюсом 11 зацепления зубьев полуосевой шестерни 3 с сателлитом 5.
Одновременно, от момента сопротивления колес качению через ведущие валы и полуосевые шестерни 2 и 3 к сателлитам 4 и &в полюсах 11 зацепления их зубьев приложена силовая составляющая этого момента сила Рк. .
Сила РК , од на составляющая Рк, приложена к сателлиту 4 в полюсе 11 зацепления его зубьев с зубьями полуосевой шестерни 2.
Сила Р2к. другая составляющая силы Рк, приложена к сателлиту в полюсе 11 зацепления его зубьев с зубьями полуосевой шестерни 3.
При движении транспортного средства величина силы Р0 определяется величиной силы Рк, и во всех случаях они равны между собой. При изменении величины силы Р изменяется величина силы Р0.
При движении транспортного средства, при всех равных условиях, происходит изменение величины силы Рк в зависимости от состояния дороги от условий сцепления ведущих колес с дорогой. При этом силы Рк и Рк2 изменяются независимо на каждом ведущем колесе и определяются коэффициентом сцепления ведущих колес с дорогой, т.е. fi и f2. Величины Ро1 и Р02 определяются соотношением сил Рк /Рк .
При одинаковых условиях сцепления ведущих колес с дорогой, когда f i fz, силы Рк1 и Рк2 равны между собой и приложенные в плоскости вращения сателлитов 4 и 5 в полюсах 11 зацепления зубьев сателлитов 4 и 5 с полуосевыми шестернями 2 и 3 уравновешиваются одинаковыми силами Р01 и Р02, приложенными в плоскости вращения сателлитов 4 и 5 в точках 10 контакта его с промежуточными шестернями 6 и 7.
Равные и направленные в разные стороны силы Ро1, Ро . Рк1 и Рк2, приложенные к сателлитам 4 и 5 в плоскости их вращения, находятся в равновесии и крутящего момента, могущего повернуть сателлиты 4 и 5 относительно их геометрической оси, не создают. Сателлиты 4 и 5 находятся в равновесии. Крутящий момент передается на оба колеса. Транспортное средство совершает прямолинейное движение.
При изменении условий сцепления ведущих колес с дорогой, когда f i fa, происходит изменение соотношения сил Рк1 и Рк2 в полюсах 11 зацепления полуосевых шестерен 2 и 3 и сателлитов 4 и 5.
Это изменение сил Рк вызывает немед- 5 ленное изменение соотношения сил Р01 и Ро2 в точках 10 контакта сателлитов 4 и 5 с промежуточными шестернями 6 и 7. При этом соотношение сил Р0 равно соотношению сил Рк. т.е. Р01/Ро2 Рк1/Рк2.
0 Равные и направленные в разные стороны силы Ро и Рк действуют в плоскости вращения сателлитов 4 и 5, взаимно уравновешены и не создают момента, способного вращать сателлиты 4 и 5. Сателлиты
5 4 и 5 находятся в равновесии. Пропорциональные крутящие моменты передаются на колеса. Транспортное средство совершает прямолинейное движение. Пробуксовка колес не происходит.
0 Таким образом, пробуксовка транспортного средства перед переходом его в блокирующее состояние не происходит, так как нет необходимости в заклинивании элементов дифференциала, для которых нужно
5 проворачивание сателлита, перед блокировкой.
При поворотах и наезде на препятствие под действием внешних сил, приложенных к одному из колес в результате их разных
0 скоростей перемещения относительно дороги, происходит вращение полуосевых шестерен 2 и 3, сателлитов 4 и 5 и промежуточных шестерен 6 и 7 и дифференциальное действие механизма.
5 Наличие зазора между осью 13 и отверстием 14 корпуса 1 и контакт оси 13 с боковыми стенками 18 позволяет получить надежный контакт в зацеплении зубьев промежуточных шестерен 6 и 7 с сателлитами 40 и 5 и одновременно стабильное положение сателлитов 4 и 5 по отношению к полуосевым шестерням 2 и 3. Это позволяет уменьшить износ шестерен и повысит надежность дифференциала.
5 Наличие сферической поверхности 21 на торце промежуточных шестерен 6 и 7 со стороны полуосевых шестерен 2 и 3 позволяет уменьшить осевые габариты диффе- .рекциала.
0 Дифференциал обладает повышенной надежностью, обусловленной устойчивым зацеплением сателлитов с полуосевыми шестернями, и имеет простую конструкцию. Формула изобретения
5 1.Самоблокирующийся дифференциал транспортного средства, содержащий установленные в корпусе полуосевые шестерни, находящиеся в зацеплении с сателлитами, связанными с корпусом через промежуточные шестерни, каждая из которых установлена с возможностью вращения на водиле, оси которых расположены под углом к оси вращения полуосевых шестерен с пересечением в центре дифференциала, отличающийся тем, что, с целью упрощения конструкции и повышения ее надежности, дифференциал выполнен с двумя промежуточными шестернями, расположенными соосно, а сателлиты установлены с возможностью вращения на оси, концы которой рас- положены в двух продольных пазах, выполненных в корпусе, причем упомянутая ось установлена с возможностью перемещения по пазу в плоскости вращения корпуса и зафиксирована от перемещений вдоль оси вращения полуосевых шестерен.
2,Дифференциал по п.1, отличающийся тем, что паз в корпусе представляет собой отверстие, большая ось которого расположена в плоскости вращения полуосевых шестерен, совмещенной с геометрической осью сателлита, и выполнен из двух
секторов, соединенных боковыми стенками, находящимися в контакте с осью, а продольная ось каждого сектора расположена под углом к геометрической оси сателлита с пересечением с ней в центре, причем размер
сектора равен размеру оси.
З.Дифференциал по пп,1 и 2, о т л и ч а- ю щ и и с я тем, что продольный паз корпуса представляет собой два сектора, соединенных боковыми стенками, находящимися в
контакте с осью, а продольная ось сектора расположена параллельно геометрической оси сателлита, причем размер сектора равен размеру оси.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1691158A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1676850A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1585179A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1614950A1 |
| Дифференциал транспортного средства | 1990 |
|
SU1763255A1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1428604A1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1495151A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1687471A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1581611A1 |
| Самоблокирующийся дифференциал транспортного средства | 1990 |
|
SU1722909A1 |
Изобретение относится к области машиностроения и может использоваться в трансмиссиях транспортных средств. Цель изобретения - упрощение конструкции и повышение ее надежности, Самоблокирующийся дифференциал транспортного средства содержит две установленные в корпусе взаимосвязанные шестерни, два сателлита, две промежуточные шестерни и кинематически связанное с корпусом водило. Водило выполнено в виде закрепленных в корпусе соосно двух ступиц, продольные оси которых совмещены и пересекаются в центре дифференциала, под углом к оси вращения полуосевых шестерен. На каждой ступице с возможностью вращения установлена промежуточная шестерня, введенная в зацепление с двумя диаметрально расположенными , сателлитами, находящимися в зацеплении с полуосевыми шестернями. Сателлиты установлены с возможностью вращения на оси, концы которой свободно помещены в отверстиях корпуса. Зазор между отверстием корпуса и осью обеспечивает возможность ее перемещения в плоскости вращения корпуса дифференциала. 2 з.п.ф-лы, 8 ил.
А-А
Фиг. 1
ptfS.3
15
а
Видв
фиеЛ
Г-Г
19
фиг.5
ери г. 7
16
6
8
1
Фм. 8
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1585179A1 |
| кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
