Изобретение относится к машиностроению и может быть использовано в трансмиссиях транспортных средств.
Целью изобретения является упрощение конструкции и повышение надежности.
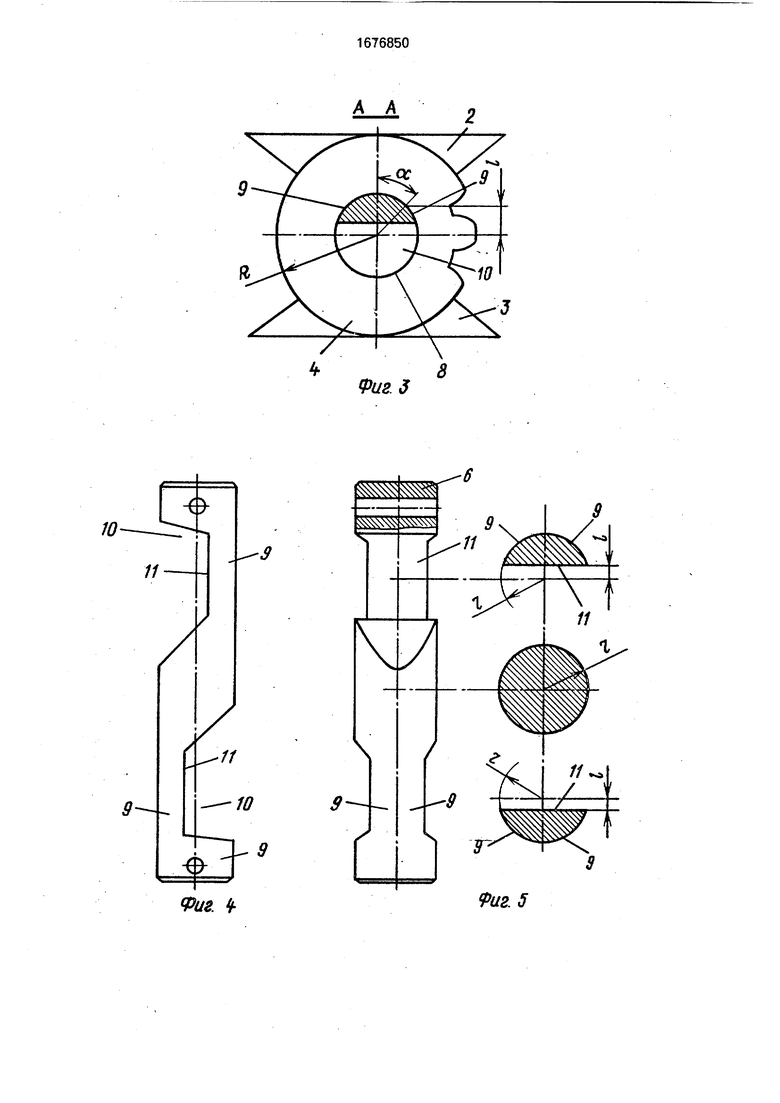
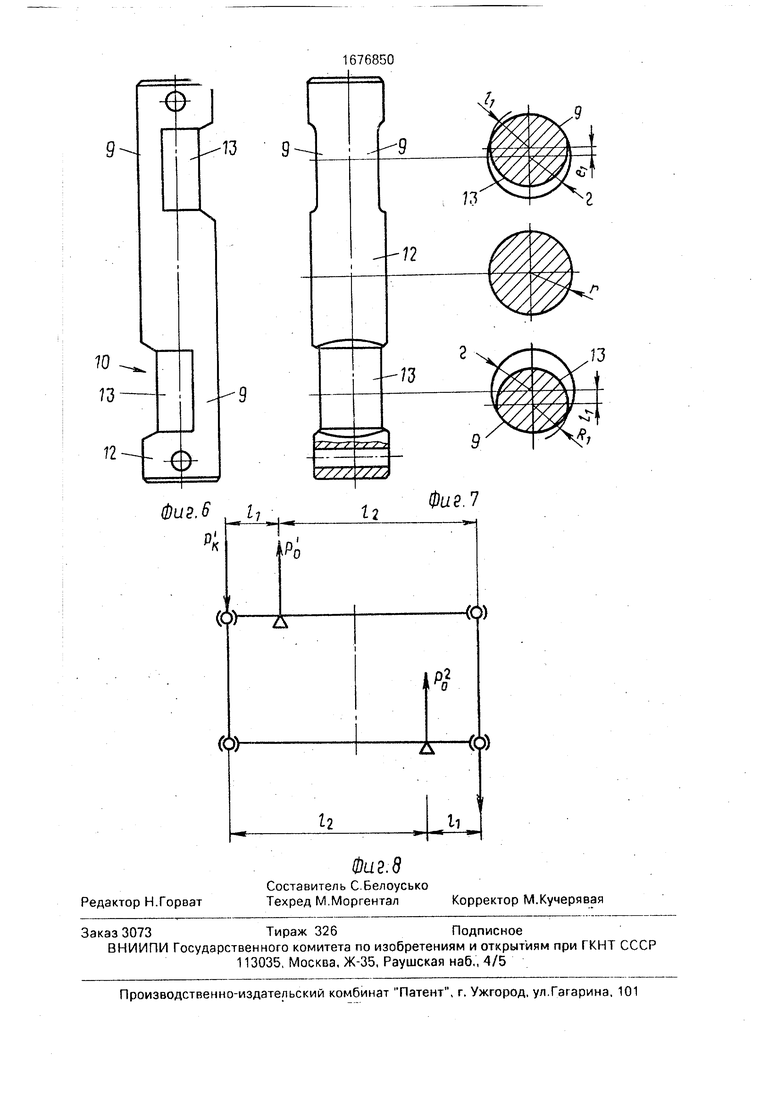
На фиг. 1 показан самоблокирующийся дифференциал, продольное сечение; на фиг. 2 - то же, в поперечное сечение; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - водило, вид сбоку; на фиг. 5 - то же, вид в плане; на фиг. 6 - то же, вид сбоку, вариант выполнения; на фиг. 7 - то же, вид в плане, вариант выполнения; на фиг. 8 - кинематическая схема дифференциала.
Самоблокирующийся дифференциал транспортного средства содержит корпус 1, соосно расположенные в корпусе 1 полуосевые шестерни 2 и 3, введенные в зацепление с сателлитами 4 и 5, установленными с возможностью вращения на водиле 6, связанном с корпусом 1.
Водило 6 представляет собой цилиндрическую ось, закрепленную концами в корпусе 1, ось закреплена при помощи штифтов 7 или другим известным способом, причем продольная ось водила 6 совмещена с центром О дифференциала (фиг. 1-3).
Водило 6 находится в контакте с отверстием 6 каждого сателлита 4 и 5, одной поверхностью 9 расположено на расстоянии е от плоскости симметрии дифференциала, перпендикулярной оси вращения полуосевых шестерен 2, 3, и пересекает эту ось под прямым углом в центре дифференциала О. Контакт водила 6 с отверстиями 8 двух сателлитов 4, 5 происходит по разные стороны упомянутой плоскости.
Водило б имеет выполненные на нем в местах сопряжения с отверстиями 8 сателлитов 4, 5 углубления 10. Эти углубления 10 расположены по обе стороны плоскости симметрии дифференциала, совмещенной с осью вращения полуосевых шестерен 2 и 3,
О
о
00
ел о
пересекающей продольную ось водила 6 под прямым углом (фиг. 4 и 5).
Углубления 10 образованы на водиле 6 двумя плоскостями 11, параллельными пло- QKOCTH симметрии дифференциала, перпендикулярной оси вращений полуосевых | иестерен 2, 3 и пересекающей упомянутую ( под прямым углом. Углубления 10 формируют на водиле 6 поверхности 9,которые находятся в контакте с отверстием 8 сателлитов 4 и 5.
В варианте выполнения дифференциала углубления 10 водила 12 (фиг. 6 и 7) в Местах контакта с отверстием 8 сателлитов 4 и 5 образованы двумя цилиндрическими Поверхностями 13, ось каждой поверхности J13 смещена на величину ei относительно Плоскости симметрии дифференциала, пер- (пендикулярной оси вращения полуосевых шестерен 2, 3 и пересекающей упомянутую ось под прямым углом.
На фиг. 8 изображена кинематическая схема и приложенные силы и моменты, действующие в плоскости вращения сателлитов 4, 5 и определяющие их равновесие. На кинематической схеме взаимодействие сателлитов 4, 5 с полуосевыми шестернями 2, 3 показано как система из двух рычагов, соединенных между собой двумя подвижными звеньями. Равновесие рычагов определяется двумя осям равновесия, расположенными по одной на каждом звене со смещением Iотносительно центра рычагов. i На схеме обозначено:
Р1о, Р2о - силовая составляющая крутящего момента трансмиссии, приложенная к сателлиту 4, 5 через поверхность 9 водила 6;
17
Р к, К к - силовые составляющие моментов сопротивления качению, приложенные к сателлиту 4, 5 через полуосевые шестерни 2 и 3;
li, I2 - расстояние между полюсами зацепления зубьев сателлит 4,5- полуосевые шестерни 2, 3 и поверхности 9 водила 6,
li R-r Cosa; 12 R t-r-cos a, где R - радиус сателлитов 4, 5 по начальной окружности зубьев (средние);
П - радиус водила 6;
а - угол, образованный линией, соединяющей среднюю точку поверхности 9 водила 6 с плоскостью симметрии дифференциала, совмещенной с осью вращения полуосевых шестерен 2, 3 и продольной осью водила 6 (фиг. 3).
Мк, Мк - крутящий момент на сателлите 4, 5 в плоскости их вращения от сил Рк относительно поверхности 9.
Мт - крутящий момент трансмиссии, приложенный к дифференциалу.
Такое выполнение водила 6 позволяет приложить силы.Рк к сателлиту 4 и 5 относительно оси равновесия, в частности поверхности 9 водила 6 на разных расстояниях И, la, величина которых всегда постоянна, а равновесие сателлита 4 и 5 определяется соотношением сил Рк и приложением двух
0 поверхностей 9 водила 6 относительно продольной оси сателлита 4 и 5.
Самоблокирующийся дифференциал транспортного средства работает следующим образом.
5При движении транспортного средства,
когда условия сцепления обоих ведущих колес с дорогой одинаковы, т. е. , крутящий момент трансмиссии передается через корпус 1, поверхность 9 водила 6, отверстия
0 8 на каждый сателлит 4, 5 и далее через полуосевые шестерни 2, 3 на полуоси ведущих колес.
Силовые составляющие Ро крутящего момента трансмиссии приложены к сател5 литу 4, 5 в точках взаимодействия поверхностей 9 водила 6 с отверстием 8. В полюсах зацепления зубьев сателлит 4,5- полуосевые шестерни 2, 3 приложены силовые составляющие Рк момента сопротивления
0 движения и направлены в обратную сторону действия сил Р0. При равенстве коэффициентов сцепления колес с дорогой величина сил Р к, Р к одинакова и силы приложены на одинаковом расстоянии относительно обе5 их поверхностей 9 водила 6 создают равные крутящие момента Мк в плоскости вращения сателлита 4, 5. Сателлиты 4,5 находятся в равновесии. Транспортное средство совершает прямолинейное движение.
0 При изменении условий сцепления колес с дорогой, когда , изменяется величина сил Р1К, Р2К, допустим сила . В этом случае равновесие сателлита 4,5 определяется действием большей силы Рк и по5 верхностью 9 водила 6, расположенной со стороны полуосевой шестерни 2, связанной с колесом, имеющим лучшее сцепление с дорогой.
До определенного соотношения сил
0 Р1к/Р к большая сила Р1К, действующая на меньшем плече И, не может создать достаточный момент в плоскости вращения сателлита 4, 5, поскольку другая уменьшающаяся сила Р к действует на большем плече 2, име5 ет больший момент относительно первой поверхности 9 водила 6. Но момент от силы Р2к также не может повернуть сателлит 4 и 5, Так как величина этого возникающего большего момента ограничивается другой поверхнос(ью 9 водила 6, расположенной
со стороны полуосевой шестерни 3, от которой на сателлит 4, 5 приложена сила Рк.
Сателлиты будут находиться в равновесии при изменении величин сил Рк до определенного их соотношения. Величина этого соотношения определяется соотношением длин плеч, т. е.
Pk/Pl l2/li , или
R + г cos a f 1
R - г cos a Т2
Это соотношение определяет блокирующие свойства дифференциала в соответствии с его конструктивными размерами.
Таким образом, сателлиты 4 и 5 находятся в равновесии. Ведущие колеса транспортного средства вращаются совместно, как соединенные между собой жестким валом. Дифференциал работает в блокирующем режиме. Пробуксовка колес не происходит. Транспортное средство совершает прямолинейное движение.
При изменении условий сцепления колес с дорогой, когда 1, равновесие сателлитов 4, 5 определяется действием сил Р к относительно другой поверхности 9 водила 6, расположенной со стороны полуосевой шестерни 3, связанной с колесом, имеющим лучшее сцепление с дорогой.
При изменении условий движения эти циклы повторяются.
При поворотах и наезде на препятствие происходит дифференциальное действие механизма, сателлиты 4,5 и полуосевые шестерни 2 и 3 совершают относительное перемещение.
Вариант дифференциала, выполненный с водилом 13, работает аналогичным образом.
Однако этот дифференциал обладает лучшей надежностью, обусловленной лучшими прочностными характеристиками водила 13.
Самоблокирующийся дифференциал транспортного средства имеет простую конструкцию и технологию изготовления. Выполнение водила с цилиндрическими поверхностями позволяет повысить его надежность, обусловленную лучшими прочно
0
5
0
5
0
5
стными характеристиками водила. Дифференциал имеет малые габариты, что позволяет применить его на любых транспортных средствах, в т. ч. легковых автомобилях особо малого класса, находящихся в эксплуатации, путем простой замены водила. Формула изобретения
1.Самоблокирующийся дифференциал транспортного средства, содержащий установленные в корпусе полуосевые шестерни, введенные в зацепление с сателлитами, установленными на водиле, кинематически связанном с корпусом, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, водило закреплено концами в корпусе и установлено в контакте с отверстием каждого сателлита по поверхности, расположенной на расстоянии от плоскости симметрии дифференциала, перпендикулярной оси вращения полуосевых шестерен и пересекающей упомянутую ось под прямым углом в центре дифференциала причем контакт водила с отверстиями диаметрально расположенных на нем сателлитов выполнен по разные стороны от упомянутой плоскости.
2.Дифференциал по п. 1, отличающийся тем, что водило представляет собой цилиндрическую ось с двумя углублениями, выполненными в местах сопряжения водила с отверстиями сателлитов по обе стороны плоскости симметрии дифференциала, совмещенной с осью вращения полуосевых шестерен и пересекающей продольную ось водила под прямым углом, и образованные двумя равноудаленными плоскостями, параллельными плоскости симметрии дифференциала, перпендикулярной оси вращения полуосевых шестерен и пересекающей упомянутую ось под прямым углом в центре дифференциала,
3.Дифференциал по пп. 1 и 2, отличающийся тем, что боковые поверхности водила в местах контакта с отверстиями каждого сателлита образованы двумя сопряженными цилиндрическими поверхностями, причем ось одной цилиндрической поверхности смещена относительно упомянутой плоскости симметрии дифференциала.
//.
10
8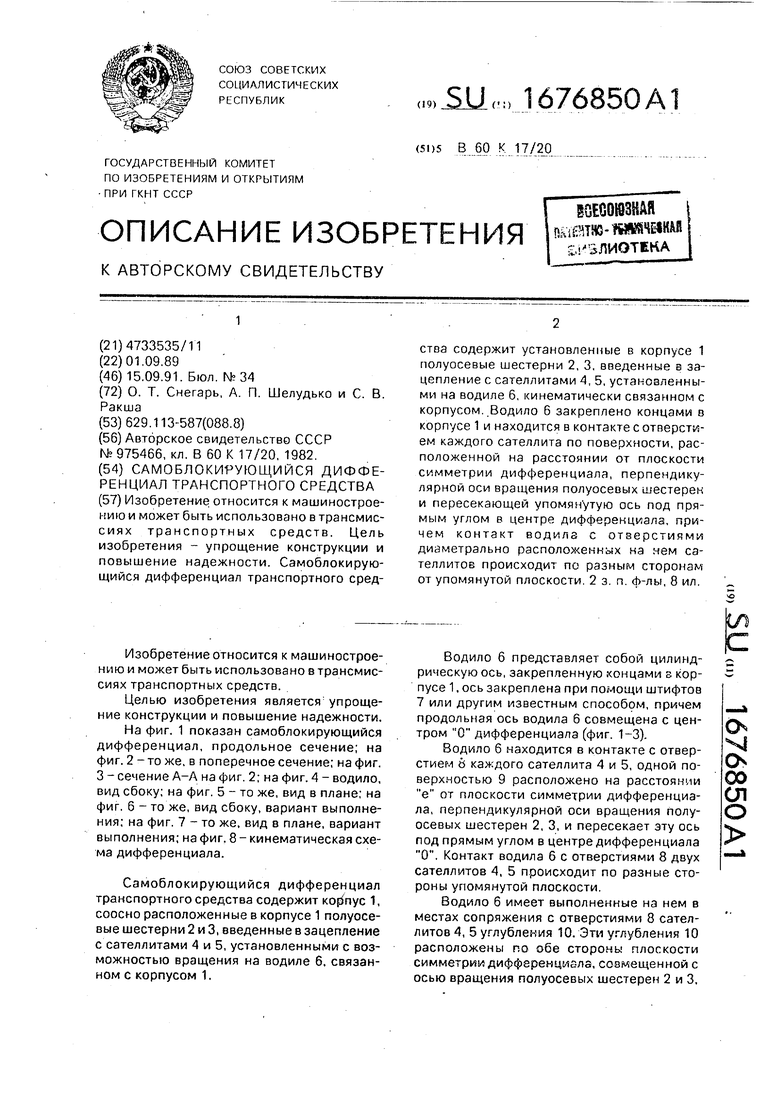
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1691158A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1708668A1 |
| Самоблокирующийся дифференциал транспортного средства | 1989 |
|
SU1696327A1 |
| Самоблокирующийся дифференциал транспортного средства | 1985 |
|
SU1260269A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1585179A1 |
| Самоблокирующийся дифференциал транспортного средства | 1987 |
|
SU1428604A1 |
| Самоблокирующийся дифференциал транспортного средства | 1988 |
|
SU1614950A1 |
| Цилиндрический самоблокирующийся дифференциал | 1984 |
|
SU1262162A1 |
| Самоблокирующийся дифференциалТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU846330A1 |
| Самоблокирующийся дифференциал транспортного средства | 1985 |
|
SU1419941A1 |
Изобретение относится к машиностроению и может быть использовано в трансмис- сиях транспортных средств. Цель изобретения - упрощение конструкции и повышение надежности. Самоблокирующийся дифференциал транспортного средства содержит установленные в корпусе 1 полуосевые шестерни 2, 3, введенные в зацепление с сателлитами 4, 5, установленными на водиле 6, кинематически связанном с корпусом. Водило 6 закреплено концами в корпусе 1 и находится в контакте с отверстием каждого сателлита по поверхности, расположенной на расстоянии от плоскости симметрии дифференциала, перпендикулярной оси вращения полуосевых шестерен и пересекающей упомянутую ось под прямым углом в центре дифференциала, причем контакт водила с отверстиями диаметрально расположенных на нем сателлитов происходит по разным сторонам от упомянутой плоскости. 2 з. п. ф-лы, 8 ил.
Фиг. t
11
11 -10
ТТ- 9
Фиг. f
А А
Фиг.З
фиэ.б
-9
12
13
| Самоблокирующийся дифференциал транспортного средства | 1980 |
|
SU975466A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
