Изобретение относится к устройствам точной стабилизации скорости двигателя иостоянного тока путем регулирования тока возбуждения.
Подобно известным системам регулирования скорости предлагаемый регулятор содержит магнитный усилитель МУ, управляемый сигналом постоянного тока от измерительного органа скорости UO.
Особенностью предлагаемого устройства является наличие в магнитном усилителе двух дополнительных обмоток управления, соединенных встречно-последовательно и подключенных к источнику К. сигнала переменного тока эталонной частоты, например к кварцевому генератору. Благодаря этому достигается астатическое регулирование скорости двигателя постоянного тока, причем точность стабилизации скорости зависит от точности стабилизации источника эталонной частоты. Если в качестве источника управляющего сигнала эталонной частоты применить кварцевый генератор, то можно обесиечить стабилизацию скорости двигателя с точностью 4; 0,01 % при всех эксплуатационных режимах работы.
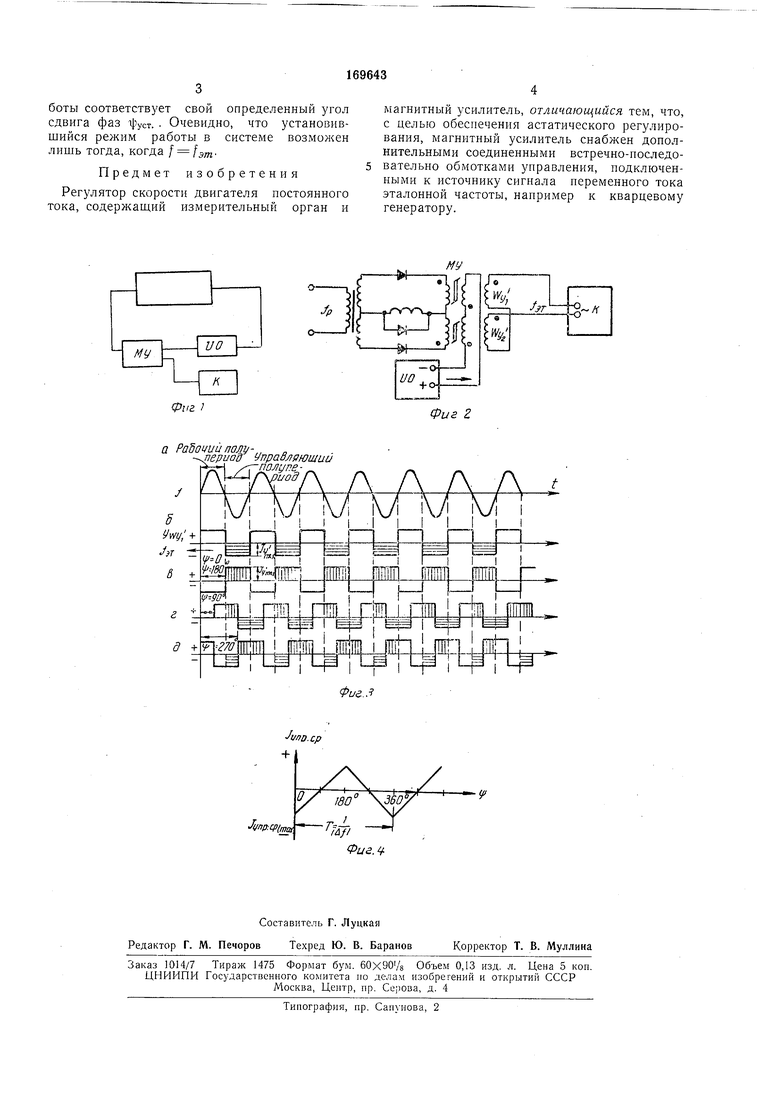
Па фиг. 1 изображена блок-схема предложенного устройства; на фиг. 2 - его принципиальная схема; на фиг. 3 - осциллограммы, поясняющие принцип управления магнитным усилителем сигналом переменного тока, частота которого f,,; в неустановивщихся режимах отличается от частоты питания f рабочей цепи магнитного усилителя, которая пропорциональна скорости двигателя. Если скорость двигателя, т. е. частота питания рабочей цепи не равна то на МУ начинает действовать управляющий сигнал разностной частоты А/ (-/.,т) и обеспечивается фазовое управление МУ. Действительно, в зависимости от угла сдвига фаз ; между напряжением питания рабочей цепи и током эталонной частоты (см. фиг. 3, а), среднее значение тока в обмотках Wyi и Wy-2 за управляющий иолупериод /упр. ср. изменяется по величине и по знаку. Если, например, разность частот Д/ поддерживается постоянной, а ток эталонной частоты имеет прямоугольную форму (фиг. 3,6, в, г, д), то зависимость среднего значения тока в обмотках Wyi и Wt/a за управляющпй полупериод в функции угла
сдвига фаз г|з (см. фиг. 4) представляет линейную пилообразную симметричную относительно оси абсцисс кривую.
В результате, под действием управляющего сигнала от ИО осуществляется «грубое регулирование скорости, а ири воздействии управляющего сигнала эталонной частоты осуществляется астатическое регулирование скорости за счет фазового сдвига этого сигнала относительно напряжения питания рабочей
боты соответствует свой определенный угол сдвига фаз . Очевидно, что установившийся режим работы в системе возможен лишь тогда, когда этПредмет изобретения
Регулятор скорости двигателя постоянного тока, содержаший измерительный орган и
магнитный усилитель, отличающийся тем, что, с целью обеспечения астатического регулирования, магнитный усилитель снабжен донолнительными соединенными встречно-иоследовательио обмотками управления, подключенными к источнику сигнала исременного тока эталонной частоты, наиример к кварцевому генератору.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1973 |
|
SU1840121A2 |
| Астатический регулятор частоты вращения | 1977 |
|
SU738085A1 |
| Стабилизированный вентильный электропривод | 1988 |
|
SU1693696A1 |
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКАВСЕСОЮЗНАЯВРАЩЕ1}*^?НТНО-ТЕХ1Ш4ЕСКБИБЛИОТЕКА | 1972 |
|
SU327560A1 |
| Электропривод | 1986 |
|
SU1365336A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЛАВНЫМ ТОРМОЖЕНИЕМ ПОДЪЕМНО-ТРАНСПОРТНОГО МЕХАНИЗМА | 1966 |
|
SU182786A1 |
| СТЕНД ДЛЯ НАГРУЖЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН ПОСТОЯННОГО ТОКА ПРИ ИСПЫТАНИЯХ | 1991 |
|
SU1814385A1 |
| Устройство для стабилизации напряжения или тока | 1960 |
|
SU139686A1 |
| Устройство группового регулирования режима работы агрегатов электростанции по частоте и мощности | 1972 |
|
SU542320A1 |
| ЧАСТОТНОУПРАВЛЯЕМЫЙ | 1969 |
|
SU240092A1 |
, Ч
л
-.-о
:%
а Радоций . „
-период УпраВляюшии
1 ° - if-e
80
Jvnp:Cpl,
(maf
Ж
.g
