Предлагаемое изобретение относится к электротехнике, а именно к устройствам управления скоростью вращения асинхронными двигателями, используемыми, в частности, на подвижных объектах (например, ракетах) для привода маховой массы гироскопов.
Для получения высоких точностных характеристик гироприборов необходимо стабильное вращение в процессе работы ротора гиродвигателя, что в ряде случаев требует создания специальной системы автоматического регулирования оборотов гиродвигателя.
Известно, что для создания такой системы необходимо получение информации о текущей скорости вращения ротора двигателя, которая обычно получается при помощи тахогенераторов или при помощи замера остаточной эдс отключаемого на время измерения двигателя. Первый способ измерения оборотов неприемлем для силовых гироприборов ввиду отсутствия у них доступа к вращающемуся валу, а второй - не позволяет принципиально получить высокостабильную скорость вращения ввиду дискретного характера измерения и регулирования оборотов гиродвигателя. Кроме того, схема источника питания усложняется за счет коммутационных цепей.
Поскольку в настоящее время известен способ получения информации о частоте скольжения ротора гиродвигателя из тока потребления (см., например, авт.св.1840169), то имеется возможность создания автоматической системы регулирования (стабилизации) оборотов асинхронного гиродвигателя, работающей по принципу астатической системы, т.е. фактически синхронизировать асинхронный гиродвигатель с частотой питания.
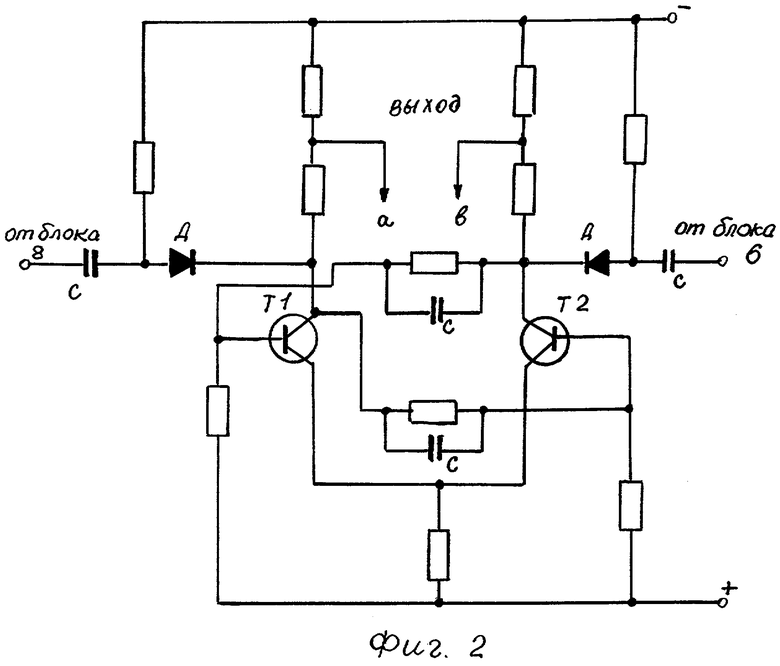
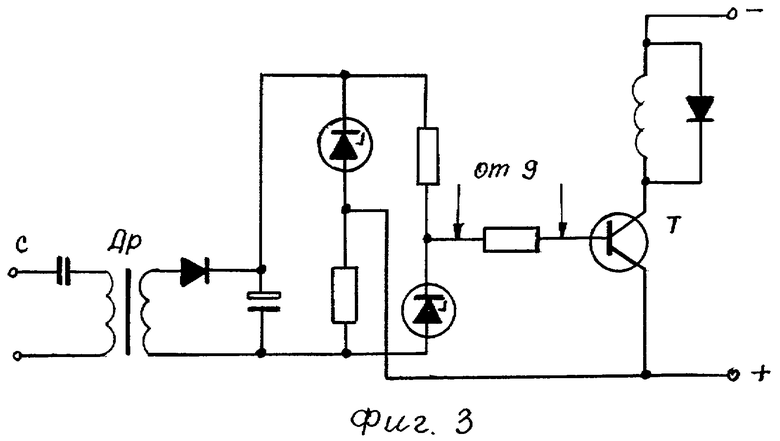
Сущность предлагаемого изобретения поясняется чертежами, где на фиг.1 показана блок-схема устройства в целом, а на фиг.2 - схема фазочувствительного устройства, предназначенного для выделения сигнала рассогласования, пропорционального разности фаз приведенной к частоте скольжения частоты питающего напряжения и частоты скольжения, на фиг.3 - схема статического регулятора.
На фиг.1 обозначено:
1 - кварцевый задающий генератор;
2 - регулятор напряжения;
3 - выходной каскад статического преобразователя;
4 - асинхронный гиродвигатель;
5 - усилитель регулятора напряжения;
6 - блок выделения и усиления частоты скольжения;
7 - измерительный орган статического канала регулирования;
8 - делитель частоты;
9 - фазочувствительное устройство астатического контура регулирования.
На фиг.3 ОУ обозначена обмотка управления магнитного усилителя регулятора напряжения.
Работа схемы кратко сводится к следующему. С шунта, включенного в одну из фаз гиродвигателя, снимается сигнал тока потребления, промодулированный частотой 2(f1-fn), где f1 - частота питания, а fn - частота вращения ротора (см. авт.св.1840169).
После выделения и усиления указанной частоты блоком 6 (фиг.1) она поступает на измерительный орган статического канала регулирования частоты. Последний вырабатывает сигнал рассогласования, который отрабатывается после усиления статическим каналом регулирования частоты скольжения. В результате этого частота скольжения оказывается в зоне захвата астатического канала регулирования, и последний осуществляет окончательный процесс регулирования частоты скольжения относительно частоты питания, приведенной к значению частоты скольжения при помощи делителя частоты 8.
Астатический регулятор осуществляет управление по углу сдвига фаз приведенного напряжения кварцевого задающего генератора и напряжения объекта регулирования (в нашем случае частоты абсолютного скольжения гиродвигателя), что и обеспечивает астатическое регулирование оборотов ротора, ибо установившийся неавтоколебательный режим в такой системе возможен лишь при

где ψу - установившееся значение угла сдвига фаз;
ω0 и ω - опорная и регулируемая угловые частоты.
Это означает, что интегральный регулятор синхронизирует работу стабилизируемого объекта с источником эталонной частоты.
Точность стабилизации частоты скольжения двигателя в пределах его перегрузочной способности полностью определяется тем, насколько стабилизированной является частота эталонного источника.
Очевидно, что такой регулятор должен иметь фазочувствительное устройство. Так как на фазочувствительное устройство подается не интегральный угол ϕ(t), а отклонение регулируемой частоты от номинальной (эталонной) Δω(t)=ω0-ω(t), то в этом случае фазочувствительное устройство можно принять за интегрирующее звено, выходной сигнал которого равен:

где Ку - коэффициент усиления.
Таким образом, выходной сигнал фазочувствительного устройства представляет собой периодическую функцию интеграла отклонения частоты во времени. Эта особенность и обуславливает наличие статические контура регулирования частоты скольжения, так как при периодическом характере регулирующего воздействия зона, в которой регулятор правильно работает, ограничена вполне определенными пределами изменения угла сдвига фаз ϕ(t). Поэтому в системе имеется статический регулятор, предназначенный для поддержания регулируемой частоты, близкой к номинальному значению до того момента, когда может вступить в действие интегральный регулятор. Практически это сводится к подаче на вход усилителя статического регулятора (R1, фиг.3) двух сигналов: пропорционального отклонению частоты Δf с измерительного органа частоты (С2, Др1, фиг.3) и пропорционального углу сдвига фаз ϕ(t) с фазочувствительного устройства.
Фазочувствительное устройство, фиг.2, представляет собой триггер с двумя устойчивыми состояниями и двумя выходами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Статический преобразователь с блоком импульсного перевозбуждения для питания гистерезисного гиродвигателя | 1981 |
|
SU989729A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1971 |
|
SU1840169A1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННОГО РАЗГОНА АСИНХРОННЫХ ГИРОДВИГАТЕЛЕЙ | 1972 |
|
SU1840124A2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО ЧАСТОТНОГО РАЗГОНА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1974 |
|
SU1840011A1 |
| Способ управления гистерезисным двигателем гироприбора | 1981 |
|
SU1084935A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
Изобретение относится к электротехнике, а именно к устройствам управления скоростью вращения асинхронными двигателями, используемыми, в частности, на подвижных объектах для привода маховой массы гироскопов. Технический результат заключается в получении скорости вращения двигателя, жестко связанной с частотой питания. Для этого в устройство введен делитель частоты питания, вход которого подключен к выходу кварцевого задающего генератора, а выход - к фазочувствительному устройству астатического контура регулирования. 3 ил.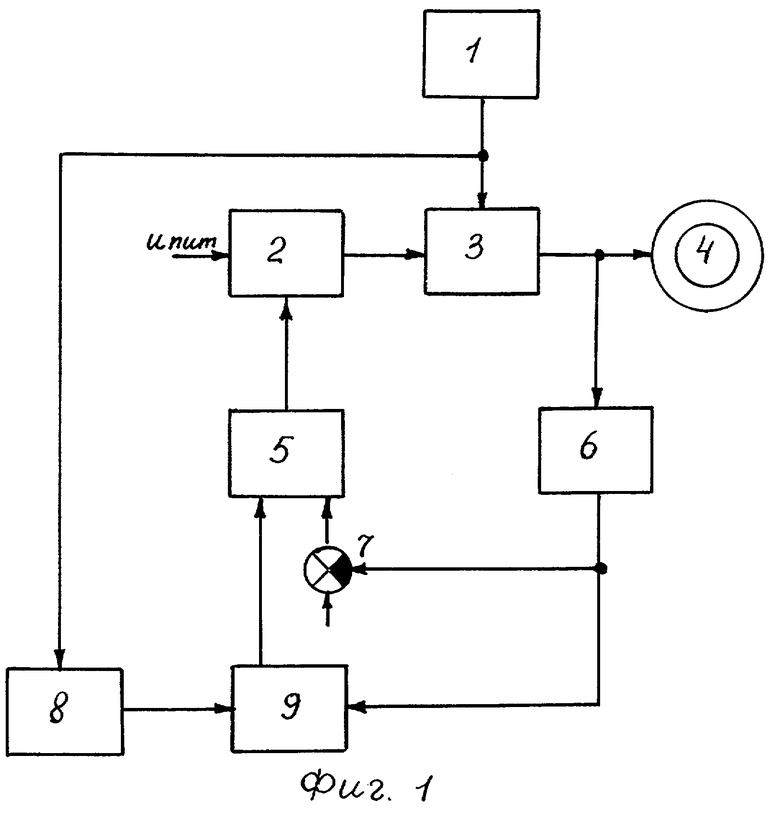
Устройство для форсированного разгона асинхронного гиродвигателя по авт. св. №1840169, отличающееся тем, что, с целью получения скорости вращения двигателя, жестко связанной с частотой питания, введен делитель частоты питания, вход которого подключен к выходу кварцевого задающего генератора, а выход - к фазочувствительному устройству астатического контура регулирования.

