Изобретение относится к системам автоматического управления процессом бурения и предназначено для автоматического управления электроприводом вращательного станка геологоразведочного бурения.
Целью изобретения является повышение производительности и надежности станка для геологоразведочного бурения.
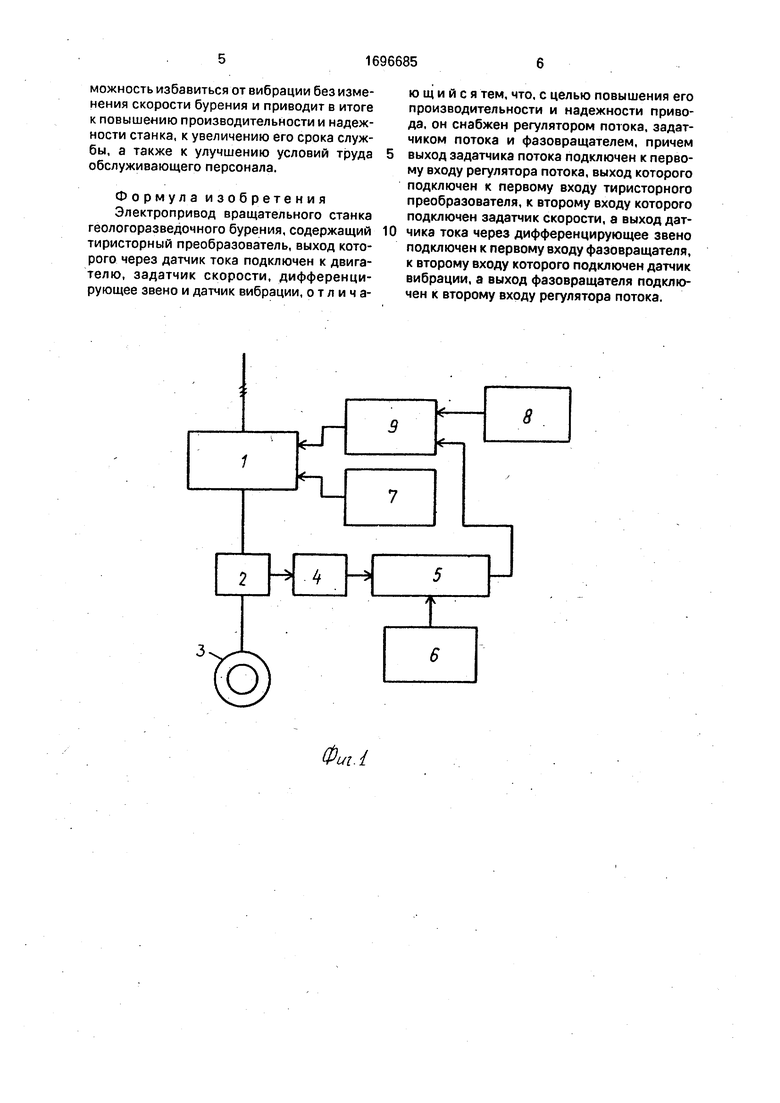
На фиг.1 приведена функциональная схема электропривода; на фиг.2 - принципиальная схема фазовращателя; на фиг.З - принципиальная схема регулятора потока.
Электропривод (фиг.1) содержит тиристорный преобразователь 1, датчик 2 тока,
асинхронный двигатель 3, дифференцирующее звено 4, фазовращатель 5, датчик 6 вибрации, задатчик 7 скорости, задатчик 8 потока и регулятор 9 потока, первый вход которого соединен с задатчиком 8 потока, второй вход - с выходом фазовращателя 5, а выход - с первым входом тиристорного преобразователя 1. Второй вход тиристорного преобразователя 1 соединен с выходом задатчика 7 скорости, а его выход через датчик 2 тока - с асинхронным двигателем 3. Вход дифференцирующего звена 4 соединен с выходом датчика 2 тока, а его выход - с первым входом фазовращателя 5. второй
о ю о
о
00
сл
вход которого соединен с выходом датчика 6 вибрации.
Фазовращатель 5 (фиг.2) представляет собой известный LR поворотный мост. В качестве трансформатора 10 используется 5 любой однофазный низкочастотный транс- Форматор напряжения. В одном плече моста используется резистор 11, в другом в качестве регулируемой индуктивности 12 используется магнитный усилитель с 10 встречно-параллельным включением рабочих обмоток 13. При такой схеме включения коэффициент усиления магнитного усилителя по мощности близок к единице, а коэффициент усиления по напряжению зависит 15 от выбора одной или нескольких последовательно соединенных обмоток 14 управления и может быть получен любым. Обмотка 14 управления магнитного усилителя подключена к датчику 6 вибрации через согласую- 20 щий диодный мост 15.
Регулятор 9 потока (фиг.З) выполнен на основе усилителя 16 и представляет собой пропорционально-интегральный регулятор, выполняющий одновременно функцию сум- 25 мирования двух сигналов: задания потокос- цепления статора и корректирующего напряжения. Используются входные резисторы 17, 18. В цепь обратной связи включены резистор 19 и конденсатор 20. 30 Резистор 21 включен для температурной стабилизации. Выбор частотного диапазона работы регулятора осуществляется корректирующей цепочкой из конденсатора 22 и резистора 23, а также конденсатором 24. 35 Для защиты регулятора по входу используются диоды 25, 26, включенные между дифференциальными входами микросхемы.
Устройство работает следующим образом.40
С помощью задатчика 7 скорости и за- датчика 8 потока (через регулятор 9 потока) на первый и второй входы тиристорного преобразователя 1 подаются сигналы, определяемые технологией режима бурения на 45 выходе тиристорного преобразователя появляется напряжение, и начинает работать асинхронный двигатель 3. При бурении динамическая составляющая момента сопротивления проявляется в виде переменной 50 составляющей тока статора, частота которой 1-10 Гц. Эта переменная составляющая выделяется с помощью датчика 2 тока и дифференцирующего звена 4, на выходе которого получается сигнал, пропорциональ- 55 ный переменной составляющей электромагнитного момента М1. который поступает на первый вход фазовращателя 5.
Датчик 6 вибрации, установленный на станине асинхронного двигателя 3, непосредственно замеряет вибрацию платформы станка, являющуюся результатом возмущений, идущих из забоя. Сигнал с датчика 6 вибрации поступает на второй вход фазовращателя 5, который изменяет фазу компенсирующего сигнала, пропорционального переменной составляющей электромагнитного момента М1, и должен быть настроен так, чтобы волны момента, возникающие в буровом ставе, оказывали минимальное влияние на привод, а также на всю платформу станка в целом.
Корректирующий сигнал UK с выхода фазовращателя 5 поступает на второй вход регулятора 9 потока и посредством изменения величины напряжения на выходе тиристорного преобразователя 1 вызывает изменение потокосцепления статора асинхронного двигателя 3 и соответственно развиваемого двигателем электромагнитного момента.
Электромагнитный момент асинхронный машины определяется как
М - ( Usm - а)-ф3 V%m ) Tpsm,
где m, p - число фаз и пар полюсов обмотки статора;
Rs - активное сопротивление обмотки статора;
ft)s частота поля статора;
Usm, farn - напряжение и потокосцепле- ние статора (модули векторов).
Из этого выражения видно, что при управлении потокосцеплением статора асинхронного двигателя, в частности, путем введения в регулятор потока периодической составляющей формируется принудительная периодическая составляющая в электромагнитном моменте асинхронного двигателя.
Частота напряжения на- выходе тиристорного преобразователя 1 и частота поля статора остаются неизменными и определяются сигналом с задатчика 7 скорости. Частота вращения асинхронного двигателя 3 при таком управлении изменяется в пределах, определяемых жесткостью естественной механической характеристики асинхронного двигателя, что практически не сказывается на скорости бурения и производительности работы станка.
Использование электропривода вращательного станка геологоразведочного бурения позволяет обеспечить компенсацию возмущений, идущих из забоя в процессе бурения, за счет формирования принудительной периодической составляющей в электромагнитном моменте исполнительного асинхронного двигателя. Это дает возможность избавиться от вибрации без изменения скорости бурения и приводит в итоге к повышению производительности и надежности станка, к увеличению его срока службы, а также к улучшению условий труда обслуживающего персонала.
Формула изобретения Электропривод вращательного станка геологоразведочного бурения, содержащий тиристорный преобразователь, выход которого через датчик тока подключен к двигателю, задатчик скорости, дифференцирующее звено и датчик вибрации, о т л и ч а0
ю щ и и с я тем, что, с целью повышения его производительности и надежности привода, он снабжен регулятором потока, задат- чиком потока и фазовращателем, причем выход за датчика потока подключен к первому входу регулятора потока, выход которого подключен к первому входу тиристорного преобразователя, к второму входу которого подключен задатчик скорости, а выход датчика тока через дифференцирующее звено подключен к первому входу фазовращателя, к второму входу которого подключен датчик вибрации, а выход фазовращателя подключен к второму входу регулятора потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления бурового механизма | 1989 |
|
SU1716111A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Асинхронный электропривод с экстремальным управлением | 1983 |
|
SU1117812A2 |
| Система автоматического управления электроприводом лебедки буровой установки | 1988 |
|
SU1566012A1 |
| Устройство управления электроприводом регулятора подачи долота | 1987 |
|
SU1452944A1 |
| Электропривод | 1978 |
|
SU782114A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| Устройство для возбуждения синхронного двигателя | 1990 |
|
SU1739470A1 |
| Асинхронный электропривод с экстремальным управлением | 1984 |
|
SU1251273A1 |

Изобретение относится к автоматическому управлению процессом бурения и предназначено для автоматического управления электроприводом и вращателя станка геологоразведочного бурения. Цель изобретения - повышение производительности и надежности электропривода. Электропривод содержит тиристорный преобразователь (ТП) 1, датчик 2 тока, асинхронный двигатель 3, дифференцирующее звено 4, фазовращатель 5, датчик 6 вибрации, задат- чик 7 скорости и задатчик 8 и регулятор 9 потока. Входы регулятора 9 подключены к выходам задатчика 8 и фазовращателя 5. а выход соединен с первым входом ТП 1. Второй вход ТП 1 соединен с выходом задатчика 7, а выход ТП 1 через датчик 2 с двигателем 3. С выходом датчика 2 соединен вход дифференцирующего звена 4, выход которого подключен к первому входу фазовращателя 5, второй вход фазовращателя 5 соединен с выходом датчика 6. Компенсация возмущений, идущих из забоя в процессе бурения, производится путем формирования принудительной периодической составляющей момента двигателя 3 с помощью сигнала, учитывающего как величину, так и фазу этих возмущений. 3 ил. сл с
Фиг.1
От дифференцирующего эбена
Риг.2
| Устройство для управления скоростью вращения двигателя | 1976 |
|
SU636362A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система автоматического управления бурового механизма | 1986 |
|
SU1332004A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
