фие.1
выходе интегрирующего звена 15 пропорционален весу инструмента и соответствует сигналу на выходе задатчика нагрузки 3. К режиму бурения переходят путем уменьшения сигнала на выходе задатчика нагрузки.В процессе бурения выходной сигнал регулятора
нагрузки 4 пропорционален значению ЭДС на выходе регулятора 5 ЭДС. При постоянном токе возбуждения этот сигнал пропорционален заданной скорости подачи инструмента, а его полярность соответствует полярности скорости. 2 з.п. ф-лы, 2 ил.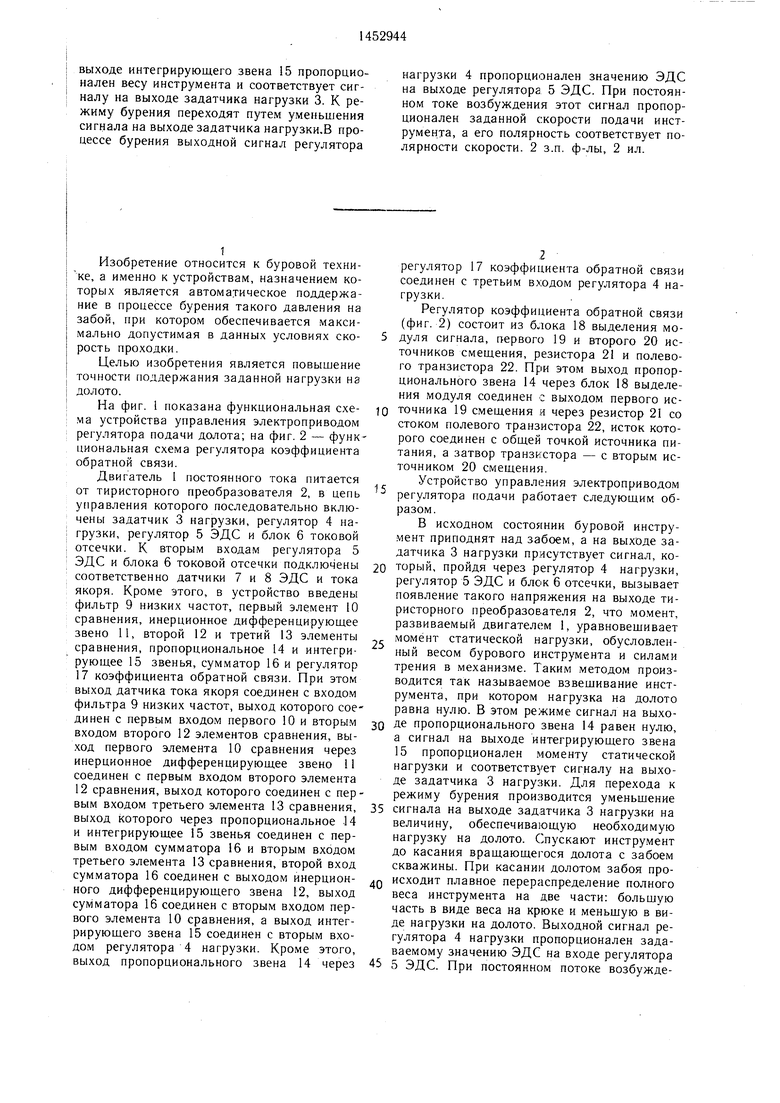


| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор подачи долота | 1986 |
|
SU1416676A1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Устройство для управления процессом шарошечного бурения | 1982 |
|
SU1094954A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Устройство для защиты электропривода постоянного тока от перегрузок | 1988 |
|
SU1601688A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332497A1 |
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU900392A1 |
Изобретение относится к буровой технике. Цель изобретения - повышение точности поддержания заданной нагрузки на долото. Для этого в устройство введены блок 6 токовой отсечки, фильтр 9 низких частот, элементы сравнения 10, 12 и 13, инерционное дифференцирующее звено 11, пропорциональное звено 14, интегрирующее звено 15, сумматор 16 и регулятор 17 коэффициента обратной связи. Устройство также содержит двигатель 1 постоянного тока, тиристор- ный преобразователь 2. задатчик нагрузки 3, регулятор нагрузки 4 и регулятор 5 ЭДС, датчик 7 ЭДС и датчик 8 тока якоря. В исходном состоянии буровой инструмент приподнят над забоем. Сигнал на выходе пропорционального звена 14 равен нулю, а на (О (Л ел to «х N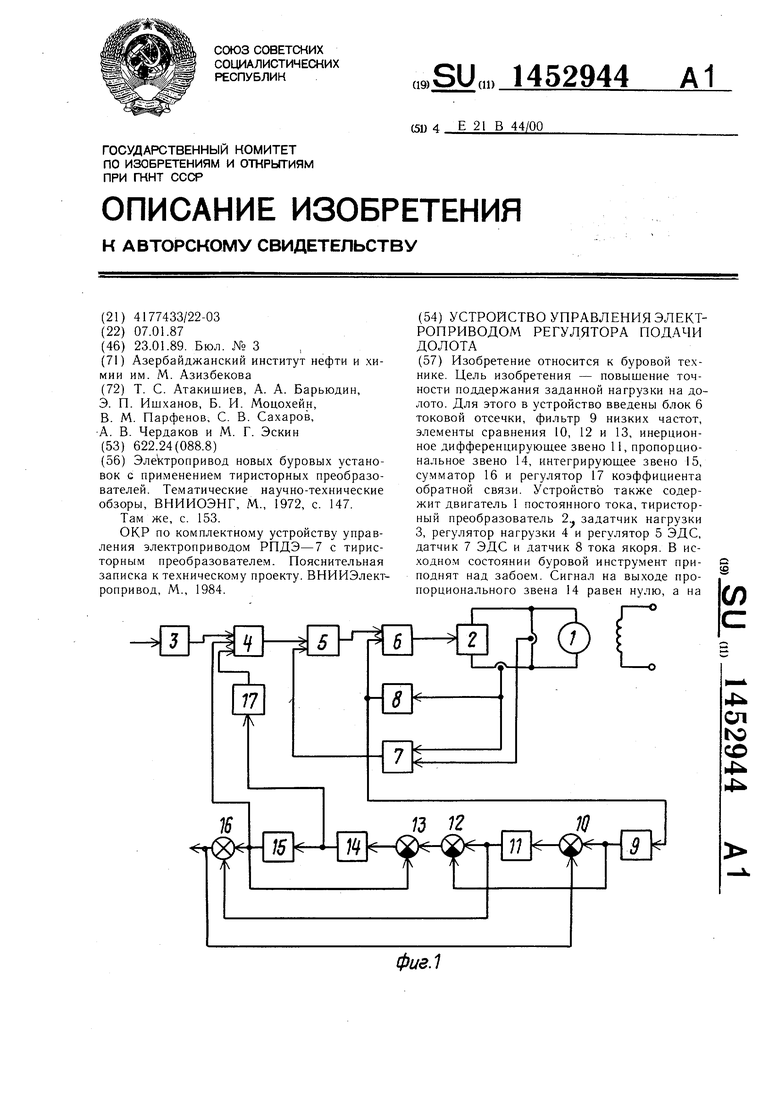
I1
I Изобретение относится к буровой техниI ке, а именно к устройствам, назначением ко- j торых является автоматическое поддержа- 1 ние в процессе бурения такого давления на забой, при котором обеспечивается максимально допустимая в данных условиях скорость проходки.
Целью изобретения является повышение точности поддержания заданной нагрузки на I долото.
I На фиг. 1 показана функциональная схе- ; ма устройства управления электроприводом регулятора подачи долота; на фиг. 2 - функциональная схема регулятора коэффициента обратной связи.
Двигатель 1 постоянного тока питается от тиристорного преобразователя 2, в цепь управления которого последовательно включены задатчик 3 нагрузки, регулятор 4 на- : грузки, регулятор 5 ЭДС и блок 6 токовой отсечки. К вторым входам регулятора 5 ЭДС и блока 6 токовой отсечки подключены соответственно датчики 7 и 8 ЭДС и тока якоря. Кроме этого, в устройство введены фильтр 9 низких частот, первый элемент 10 сравнения, инерционное дифференцируюшее звено 11, второй 12 и третий 13 элементы сравнения, пропорциональное 14 и интегрирующее 15 звенья, сумматор 16 и регулятор 17 коэффициента обратной связи. При этом выход датчика тока якоря соединен с входом фильтра 9 низких частот, выход которого соединен с первым входом первого 10 и вторым входом второго 12 элементов сравнения, вы- .ход первого элемента 10 сравнения через инерционное дифференцирующее звено 11 соединен с первым входом второго элемента 12 сравнения, выход которого соединен с первым входом третьего элемента 13 сравнения, выход которого через пропорциональное 14 и интегрирующее 15 звенья соединен с первым входом сумматора 16 и вторым входом третьего элемента 13 сравнения, второй вход сумматора 16 соединен с выходом инерционного дифференцирующего звена 12, выход сумматора 16 соединен с вторым входом первого элемента 10 сравнения, а выход интегрирующего звена 15 соединен с вторым входом регулятора 4 нагрузки. Кроме этого, выход пропорционального звена 14 через
.с,
регулятор 17 коэффициента обратной связи соединен с третьим входом регулятора 4 нагрузки.
Регулятор коэффициента обратной связи (фиг. 2) состоит из блока 18 выделения мо- 5 дуля сигнала, первого 19 и второго 20 источников смещения, резистора 21 и полевого транзистора 22. При этом выход пропорционального звена 14 через блок 18 выделения модуля соединен с выходом первого ис- 10 точника 19 смещения и через резистор 21 со стоком полевого транзистора 22, исток которого соединен с общей точкой источника питания, а затвор транзистора - с вторым источником 20 смещения.
Устройство управления электроприводом регулятора подачи работает следующим образом.
В исходном состоянии буровой инструмент приподнят над забоем, а на выходе задатчика 3 нагрузки присутствует сигнал, ко- 0 торый, пройдя через регулятор 4 нагрузки, регулятор 5 ЭДС и блок 6 отсечки, вызывает появление такого напряжения на выходе тиристорного преобразователя 2, что момент, развиваемый двигателем 1, уравновещивает момент статической нагрузки, обусловленный весом бурового инструмента и силами трения в механизме. Таким методом производится так называемое взвещивание инструмента, при котором нагрузка на долото равна нулю. В этом режиме сигнал на выхо- 0 де пропорционального звена 14 равен нулю, а сигнал на выходе интегрирующего звена 15 пропорционален моменту статической нагрузки и соответствует сигналу на выходе задатчика 3 нагрузки. Для перехода к режиму бурения производится уменьщение 5 сигнала на выходе задатчика 3 нагрузки на величину, обеспечивающую необходимую нагрузку на долото. Спускают инструмент до касания вращающегося долота с забоем скважины. При касании долотом забоя про- 0 исходит плавное перераспределение полного веса инструмента на две части: больщую часть в виде веса на крюке и меньщую в виде нагрузки на долото. Выходной сигнал регулятора 4 нагрузки пропорционален задаваемому значению ЭДС на входе регулятора 5 5 ЭДС. При постоянном потоке возбужде
ния этот сигнал пропорционален заданной скорости подачи инструмента, а его полярность соответствует полярности скорости. Если при постоянной твердости породы эта скорость соответствует скорости разбуривания породы, то нагрузка на дйлото не изменяется. Поэтому не изменяется сигнал на выходе датчика 8 тока якоря, а следовательно, на выходе интегрирующего звена 15. При этом подача инструмента осуществляется с постоянной скоростью и с заданной нагрузкой на долото.
При снижении твердости разбуриваемой породы скорость разбуривания становится больще скорости подачи инструмента. Благодаря этому нагрузка на долото начинает снижаться, а нагрузка на крюке увеличиваться. Это приводит к увеличению сигнала на выходе датчика 8 тока якоря и соответствующему увеличению сигнала на выходе интегрирующего звена 15. Происходит увеличение задающего сигнала на входе регулятора 5 ЭДС и последующее увеличение скорости подачи инструмента, которое происходит до тех пор, пока скорость подачи опять не сравняется со скоростью разбуривания породы. По мере увеличения скорости подачи происходит постепенное увеличение нагрузки на долото и соответствующее снижение веса на крюке, а следовательно, момента двигателя и сигна- лов на выходе датчика 8 тока якоря и интегрирующего звена 15.
При увеличении твердости разбуриваемой работы скорость разбуривания становится меньще скорости подачи бурового инструмента. Благодаря этому нагрузка на долото начинает увеличиваться, а нагрузка на крюке уменьщается. Это приводит к снижению сигнала на выходе датчика 8 тока якоря и соответствующему увеличению сигнала на выходе интегрирующего звена 15. Происходит снижение задающего сигнала на входе регулятора 5 ЭДС и последующее уменьшение скорости подачи инструмента, которое происходит до тех пор, пока скорость подачи опять не сравняется со скоростью раз буривания породы. По мере снижения скорости подачи происходит постепенное снижение нагрузки на долото и соответствующее уве- личение веса на крюке, а следовательно, момента двигателя, и сигналов на выходе датчика 8 тока якоря и интегрирующего звена 15. Если твердость породы весьма велика, то скорость подачи инструмента снижается до оцень малого значения, а в пределе - и до нуля. Если замедление поступательного движения инструмента меньще необходимого, то даже при достижении нулевой скорое- ти подачи процессы в системе регулирования не выходят на установившийся режим из-за остающегося рассогласования между сигна.-
15
5Q
20 25 30
35 40 55
45
50
лами заданной и действительной нагрузок. При этом изменяется полярность сигнала на выходе регулятора 4 нагрузки и электропривод переходит в двигательный режим в направлении подъема инструмента. По мере подъема происходит снижение нагрузки на долото до заданной величины и увеличение нагрузки на крюке. Благодаря этом увеличиваются сигналы на выходе датчика 8 тока якоря и интегрирующего звена 15, что вызывает обратное изменение полярности сигнала на выходе регулятора 4 нагрузки и переход электропривода к движению в сторону спуска в режиме рекуперативного торможения. После разбуривания участка с весьма твердой породой происходит постепенное увеличение скорости подачи инструмента до величины, обеспечивающей поддержание заданного значения нагрузки на долото.
В нормальном режиме бурения момент статической нагрузки не может превысить величины, определяемой весом инструмента. При переходе к режиму подъема возможны так называемый прихват инструмента и увеличение момента статической нагрузки до весьма большой величины. В этом случае ограничение тока якоря, а следовательно, и момента двигателя осуществляются с помощью блока 6 токовой отсечки, который в нормальном реж име является звеном с единичным коэффициентом передачи.
Фильтр 9 низких частот осуществляет фильтрацию высокочастотных составляющих в сигнале на выходе датчика 8 тока якоря, обусловленных дискретными свойствами ти- ристорного преобразователя 2. Инерционное дифференцирующее звено 11 предназначено для выделения из полного тока якоря динамической составляющей, величина которой пропорциональна ускорению электропривода. Таким образом, на выходе второго элемента сравнения выделяется сигнал, пропорциональный моменту статической нагрузки.
Контур, состоящий из последовательно соединенных пропорционального 14 и интегрирующего 15 звеньев, охваченных отрицательной обратной связью, предназначен для дополнительной фильтрации высокочас- торных помех на входе третьего элемента 13 сравнения. Кроме этого, сигнал на выходе пропорционального звена 14 пропорционален производной момента статической нагрузки и может быть использован в качестве корректирующего в системе управления. На выходе сумматора 16 образуется сигнал, пропорциональный вычисленному значению полного момента двигателя. Этот сигнал подается в качестве обратной связи на второй вход первого элемента 10 сравнения, чем обеспечивается повышение точности вычисления составляющих момента двигателя.
С целью повышения точности поддержания заданной нагрузки на долото при резких изменениях буримости породы сигнал, пропорциональный производной момента статической нагрузки, с выхода пропорционального звена 14 подается через регулятор 17 коэффициента обратной связи на третий вход регулятора 4 нагрузки.
Регулятор коэффициента обратной связи работает следующим образом.
При постоянном напряжении на затЕюре полевого транзистора его сопротивление зависит от величины напряжения сток-исток. Таким образом, при медленном изменении момента статической нагрузки сигнал на выходе пропорционального звена 14 и блока 18 выделения модуля мал. Поэтому напряжение сток-исток определяется большим напряжением на выходе первого источника 19 смещения. Благодаря этому сопротивление полевого транзистора мало, а сигнал, пропорциональный производной момента статической нагрузки, на третий вход регулятора нагрузки 4 практически не поступает. При увеличении скорости изменения мо.мента статической нагрузки величина сигнала как на выходе пропорционального звена 14, так и блока 18 выделения модуля возрастает. Благодаря этому напряжение сток-исток полевого транзистора 22 снижается, а его сопротивление увеличивается. Поэтому сигнал, пропорциональный производной момента статической нагрузки, в этом случае поступает на третий вход регулятора 4 нагрузки. Это приводит к повышению качества процесса регулироания и, как следствие, к повышению точности поддержания заданной нагрузки на долото.
Формула изобретения
. Устройство управления электроприводом регулятора подачи долота, содержащее двигатель постоянного тока, соединенный с тиристорным преобразователем, последова- гельно соединенные задатчики нагрузки, регулятор нагрузки и регулятор ЭДС, а также датчики тока якоря двигателя и датчик
Фие.2
Составитель В. Логинов
Заказ7Г4 /23° ™ т - Р Корректор Г Решетник
7143/23Тираж о14 .Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная 4
ЭДС, причем выход датчик ЭДС соединен с входом регулятора ЭДС, отличающееся тем, что, с целью повышения точности поддержания заданной нагрузки на долото, в 5 него введены блок токовой отсечки, фильтр низких частот, три элемента сравнения, инерционное дифференцирующее звено, пропорциональное и интегральное звенья и сумматор, при этом выход блока токовой отсечки
0 соединен с входом тиристорного преобразователя, первый вход - с регулятором ЭДС, а второй - с выходом датчика тока якоря и через последовательно соединенные фильтр низких частот, первый элемент сравнения, инерционное дифференцирующее звено, вто5 рой и третий элементы сравнения, пропорциональное и интегрирующее звенья с
вторым входом регулятора нагрузки, выход интегрального звена соединен с вторым входом третьего элемента сравнения непо0 средственно и через сумматор - с вторым в.ходом первого элемента сравнения, выход фильтра низких частот соединен с вторым входом второго элемента сравнения, выход инерционного звена - с вторым входом сумматора.
что, с целью повышения точности поддержания заданной нагрузки на долото при резких изменениях буримости породы, в него введен регулятор коэффициента обратной свяQ зи, вход которого соединен с выходом пропорционального звена, а выход - с третьим входом регулятора нагрузки.
| Элеитропривод новых буровых установок с применением тиристорных преобразователей | |||
| Тематические научно-технические обзоры, ВНИИОЭНГ, М., 1972, с | |||
| Раздвижной паровозный золотник со скользящими по его скалке поршнями и упорными для них шайбами | 1922 |
|
SU147A1 |
| Там же, с | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Пояснительная записка к техническому проекту | |||
| ВНИИЭлект- ропривод, М., 1984. | |||
