15 Щ I «ДЛ
6
СЛ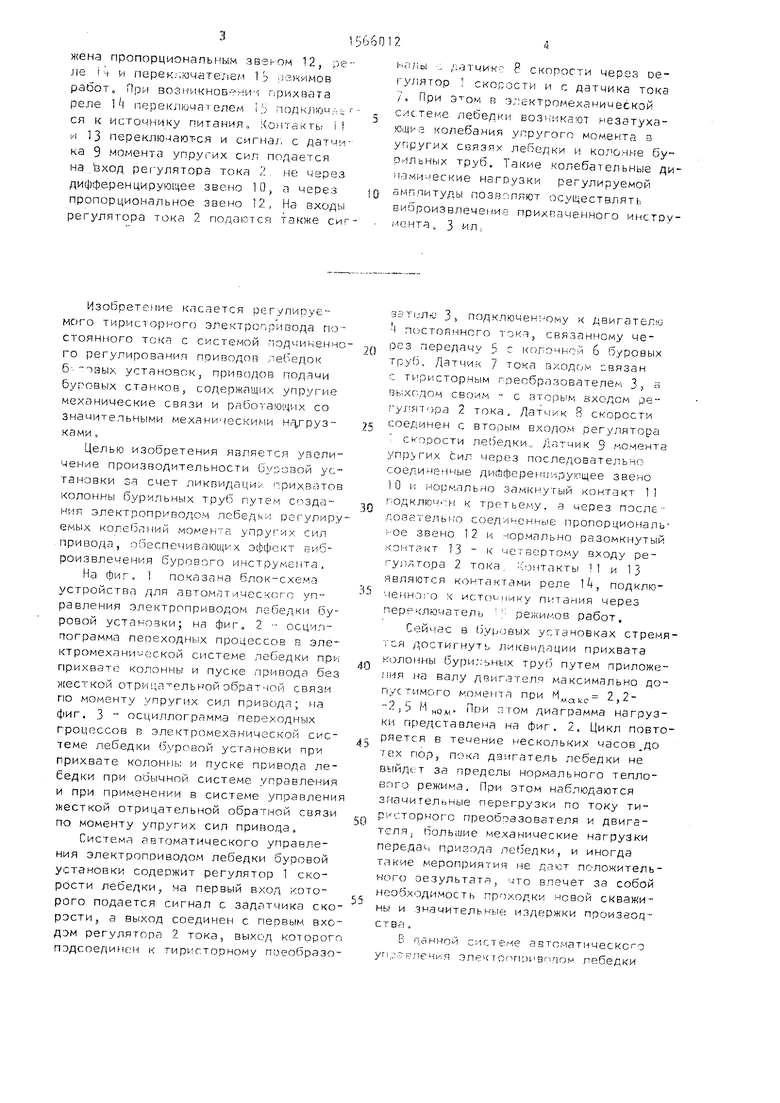
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления бурового механизма | 1986 |
|
SU1332004A1 |
| Система автоматического управления бурового механизма | 1989 |
|
SU1716111A1 |
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
| Способ регулирования осевой нагрузки на долото в процессе бурения и устройство для его осуществления | 1987 |
|
SU1476115A1 |
| Устройство управления электроприводом регулятора подачи долота | 1987 |
|
SU1452944A1 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373825A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА РЕГУЛЯТОРА ПОДАЧИ ДОЛОТА | 1996 |
|
RU2108456C1 |
| Спускоподъемный агрегат буровой установки | 1989 |
|
SU1640349A1 |
| Система автоматического управления скоростью спуска и подъема колонны бурильных труб | 1987 |
|
SU1476114A1 |
| Устройство для испытания электропривода с упругой механической передачей от двигателя к механизму | 1981 |
|
SU1000950A1 |
Изобретение относится к бурению скважин и позволяет увеличить производительность буровой установки за счет ликвидации прихватов колонны бурильных труб путем создания электроприводом лебедки регулируемых колебаний момента упругих сил привода. Система содержит регуляторы скорости 1 лебедки и тока 2, датчики скорости 8 и тока 7, подключенный к выходу регулятора 2 тока тиристорный преобразователь 3, двигатель 4 постоянного тока, связанный через передачу 5 с колонной 6 бурильных труб, и датчик 9 момента упругих сил, связанный через дифференцирующее звено 10 с регулятором 2 тока. Дополнительно система снабжена пропорциональным звеном 12, реле 14 и переключателем 15 режимов работ. При возникновении прихвата реле 14 переключателем 15 подключается к источнику питания. Контакты 11 и 13 переключаются и сигнал с датчика 9 момента упругих сил подается на вход регулятора тока 2 не через дифференцирующее звено 10, а через пропорциональное звено 12. На входы регулятора 2 подаются также сигналы с датчика 8 скорости через регулятор 1 скорости и с датчика 7 тока. При этом в электромеханической системе лебедки возникают незатухающие колебания упругого момента в упругих связях лебедки и колонне бурильных труб. Такие колебательные динамические нагрузки регулируемой амплитуды позволяют осуществлять виброизвлечение прихваченного инструмента. 3 ил.
tfgjx/ -uK8tL
Г
N5
жена пропорциональным звеном 12, реле 1ч и переключателем 15 режимов работ. При возникновении прихвата реле 1 переключателем 15 подключается к источнику питания. Контакты 11 и 13 переключаются и сигнаг, с датчика 9 момента упругих сил подается на Ьход регулятора тока 2 не через дифференцирующее звено 10, а через пропорциональное звено 12. На входы регулятора тока 2 подаются также CHI
Изобретение касается регулируемого тиристорного электропривода постоянного тока с системой подчиненного регулирования приводов лебедок установок, приводов подачи буровых станков, содержащих упругие механические связи и работающих со значительными механическими ками.
Целью изобретения является увеличение производительности буровой установки за счет ликвидации прихватов колонны бурильных труб путем создания электроприводом лебедки регулируемых колебаний момента упругих сил привода, обеспечивающих эффект виброизвлечения бурового инструмента.
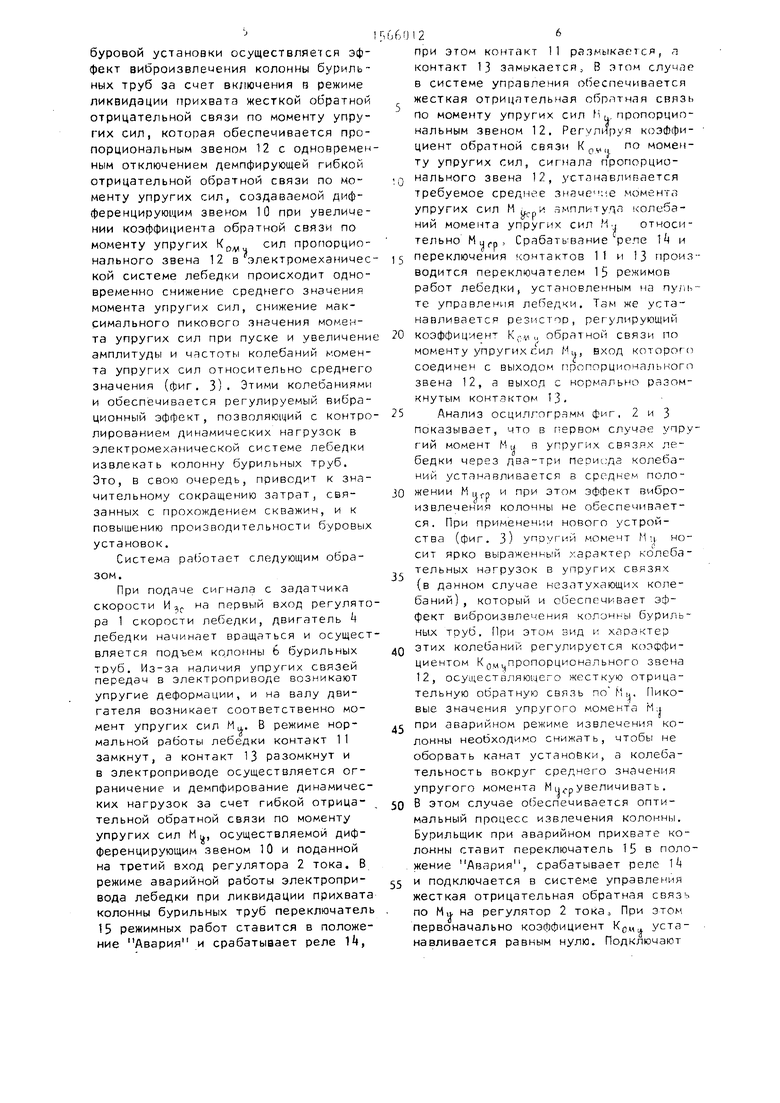
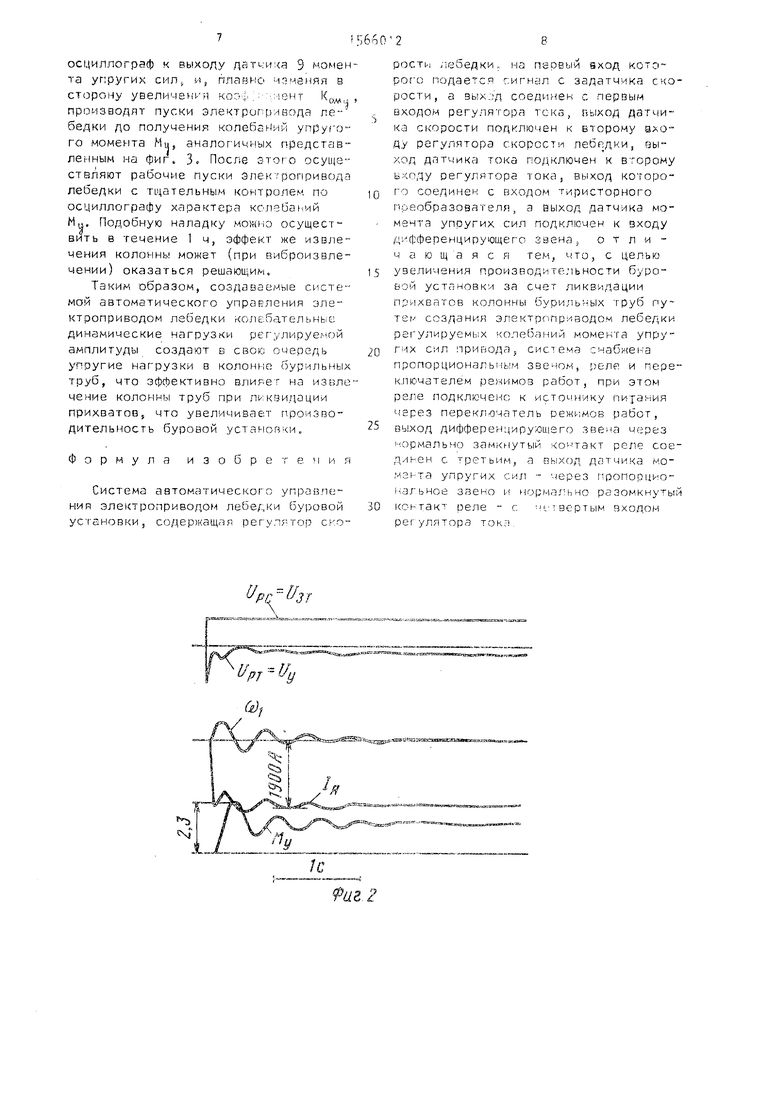
На фиг. 1 показана блок-схема устройства для автоматического управления электроприводом лебедки буровой установки; на фиг. 2 - осциллограмма переходных процессов в электромеханической системе лебедки при прихвате колонны и пуске привода без жесткой отрицательной обратной связи по моменту упругих сил привода; на фиг. 3 осциллограмма переходных процессов в электромеханической системе лебедки буровой установки при прихвате колонны и пуске привода лебедки при обычной системе управления и при применении в системе управлени жесткой отрицательной обратной связи по моменту упругих сил привода.
Система автоматического управления электроприводом лебедки буровой установки содержит регулятор 1 скорости лебедки, на первый вход которого подается сигнал с задатчика скорости, а выход соединен с первым входом регулятора 2 тока, выход которог подсоединен к тиристорному преобразо
налы с датчика 8 скорости через регулятор 1 скорости и с датчика тока 7. При этом в электромеханической системе лебедки возникают незатухающие колебания упругого момента в упругих связях лебедки и колонне бурильных труб. Такие колебательные динамические нагрузки регулируемой амплитуды позволяют осуществлять виброизвлечение прихваченного инструмента. 3 ило
5
0
5
0
5
0
5
вателю 3, подключенному к двигателю 1 постоянного тока, связанному через передачу 5 с колонной 6 буровых труб. Датчик 7 тока входом связан с тиристорным преобразователем 3, а выходом своим - с вторым входом регулятора 2 тока. Датчик 8 скорости соединен с вторым входом регулятора 1 скорости лебедки0 Датчик 9 момента упругих сил через последовательно соединенные дифференцирующее звено 10 и нормально замкнутый контакт 11 подключен к третьему, а через последовательно соединенные пропорциональное звено 12 и нормально разомкнутый контакт 13 - к четвертому входу регулятора 2 тока„ Контакты 11 и 13 являются контактами реле Ц, подключенного к источнику питания через переключатель 14 режимов работ.
Сейчас в буровых установках стремятся достигнуть ликвидации прихвата колонны бурильных труб путем приложения на валу двигателя максимально допустимого момента при Mwakc 2,2- -2,5 М ном. При этом диаграмма нагрузки представлена на фиг. 2. Цикл повторяется в течение нескольких часов.до тех пор, пока двигатель лебедки не выйдет за пределы нормального теплового режима. При этом наблюдаются значительные перегрузки по току тиристорного преобразователя и двигателя, большие механические нагрузки передач привода лебедки, и иногда такие мероприятия не дают положительного результата, что влечет за собой необходимость проходки новой скважины и значительные издержки производства.
В данной системе автоматического управления электроприводом лебедки
буровой установки осуществляется эффект виброизвлечения колонны бурильных труб за счет включения в режиме ликвидации прихвата жесткой обратной отрицательной связи по моменту упругих сил, которая обеспечивается пропорциональным звеном 12 с одновременным отключением демпфирующей гибкой отрицательной обратной связи по моменту упругих сил, создаваемой дифференцирующим звеном 10 при увеличении коэффициента обратной связи по моменту упругих Kov сил пропорционального звена 12 в электромеханической системе лебедки происходит одновременно снижение среднего значения момента упругих сил, снижение максимального пикового значения момента упругих сил при пуске и увеличени амплитуды и частоты колебаний момента упругих сил относительно среднего значения (фиг. 3). Этими колебаниями и обеспечивается регулируемый вибрационный эффект, позволяющий с контролированием динамических нагрузок в электромеханической системе лебедки извлекать колонну бурильных труб. Это, в свою очередь, приводит к значительному сокращению затрат, связанных с прохождением скважин, и к повышению производительности буровых установок.
Система работает следующим образом.
При подаче сигнала с задатчика скорости ИЯс на первый вход регулятора 1 скорости лебедки, двигатель 4 лебедки начинает вращаться и осуществляется подъем колонны 6 бурильных
труб. Из-за наличия упругих связей передач в электроприводе возникают
упругие деформации, и на валу двигателя возникает соответственно момент упругих сил М,.. В режиме нормальной работы лебедки контакт 11 замкнут, а контакт 13 разомкнут и в электроприводе осуществляется ограничение и демпфирование динамических нагрузок за счет гибкой отрицательной обратной связи по моменту упругих сил М и, осуществляемой диф1 Л
ференцирующим звеном 10 и поданной на третий вход регулятора 2 тока. В режиме аварийной работы электропривода лебедки при ликвидации прихвата колонны бурильных труб переключатель 15 режимных работ ставится в положение Авария и срабатывает реле 1,
660126
при этом контакт 11 размыкается, л контакт 13 замыкается В этом случае в системе управления обеспечивается жесткая отрицательная обрптная связь по моменту упругих сил М,, пропорциональным звеном 12. Регулируя коэффициент обратной связи , по моменту упругих сил, сигнала пропорцио10 нального звена 12, устанавливается требуемое среднее значе ие момента упругих сил М fa и амплитуда колебаний момента упругих сил М , относительно М|1Гр, Срабатывание реле И и
15 переключения контактов 11 и 13 производится переключателем 15 режимов работ лебедки, установленным на пульте управления лебедки. Там же устанавливается резистор, регулирующий
20 коэффициент KrVu обратной связи по моменту упругих пил Ни, вход которого соединен с выходом пропорционального звена 12, а выход с нормально разомкнутым контактом 13.
25 Анализ осциллограмм фиг. 2 и 3 показывает, что в первом случае упругий момент Ми в упругих связях леи
бедки через два-три перисда колебаний устанавливается в среднем поло30 жении Ммгр и при этом эффект виброизвлечения колонны не обеспечивается. При применении нового устройства (фиг. 3) упругий момент Ми носит ярко выраженный характер колебательных нагрузок в упругих связях (в данном случае незатухающих колебаний) , который и обеспечивает эффект виброизвлечения колонны бурильных труб. При этом вид и характер
4Q этих колебаний регулируется коэффициентом КОМ4пропорционального звена 12, осуществляющего жесткую отрицательную обратную связь по Ми. Пиковые значения упругого момента rU
АС при аварийном режиме извлечения колонны необходимо снижать, чтобы не оборвать канат установки, а колебательность вокруг среднего значения упругого момента М „увеличивать.
50 В этом случае обеспечивается оптимальный процесс извлечения колонны. Бурильщик при аварийном прихвате колонны ставит переключатель 15 в положение Авария, срабатывает реле 1А 5 и подключается в системе управления жесткая отрицательная обратная связь по M,i на регулятор 2 тока, При этом первоначально коэффициент Ком устанавливается равным нулю. Подключают
35
осциллограф к выходу датчика 9 момента упругих сил, и, плавно изменяя в сторону увеличения коэффициент К,. производят пуски электропривода лебедки до получения колебаний упругого момента М, аналогичных представленным на фиг. 3. После этого осуществляют рабочие пуски электропривода лебедки с тщательным контролем по осциллографу характера колебаний Ми. Подобную наладку можно осуществить в течение 1 ч, эффект же извлечения колонны может (при виброизвлечении) оказаться решающим.
Таким образом, создаваемые системой автоматического управления электроприводом лебедки колебательные динамические нагрузки регулируемой амплитуды создают в свою очередь упругие нагрузки в колонне бурильных труб, что эффективно влияет на извлечение колонны труб при ликвидации прихватов, что увеличивает производительность буровой установки.
Формула изобретений
Система автоматического управления электроприводом лебедки буровой 30 установки, содержащая регулятор скоVPS V3T
Фм.2
0
5
0
рости лебедки, на первый вход которого подается сигнал с задатчика скорости, а выход соединен с первым входом регулятора тока, выход датчика скорости подключен к второму входу регулятора скорости лебедки, выход датчика тока подключен к второму входу регулятора тока, выход которого соединен с входом тиристорного преобразователя, а выход датчика момента упругих сил подключен к входу дифференцирующего звена, отличающаяся тем, что, с целью увеличения производительности буровой установки за счет ликвидации прихватов колонны бурильных труб путем создания электроприводом лебедки регулируемых колебаний момента упругих сил привода, система снабжена пропорциональным звеном, реле и переключателем режимов работ, при этом реле подключено к источнику питания через переключатель режимов работ, выход дифференцирующего звена через нормально замкнутый контакт реле соединен с третьим, а выход датчика момента упругих сил - через пропорциональное звено и нормально разомкнутый контакт реле - с четвертым входом регулятора тока
UPC s VJT
a
ТХЛДЛЛЛПЛЛЛЛЛЛЛЛЛ
Фиг.З
| Устройство для установки аккумулятора давления в скважине | 1980 |
|
SU909136A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Динамические режимы работы буровых подъемных электромеханических систем | |||
| Электротехническая промышленность | |||
| Сер | |||
| Электропривод, 198, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
