Изобретение относится к оборудованию для стендовых исследований процессов копания рабочими органами землеройных машин и может быть использовано для исследования процесса копания рабочими органами бульдозеров.
Цель - повышение достоверности результатов исследований.
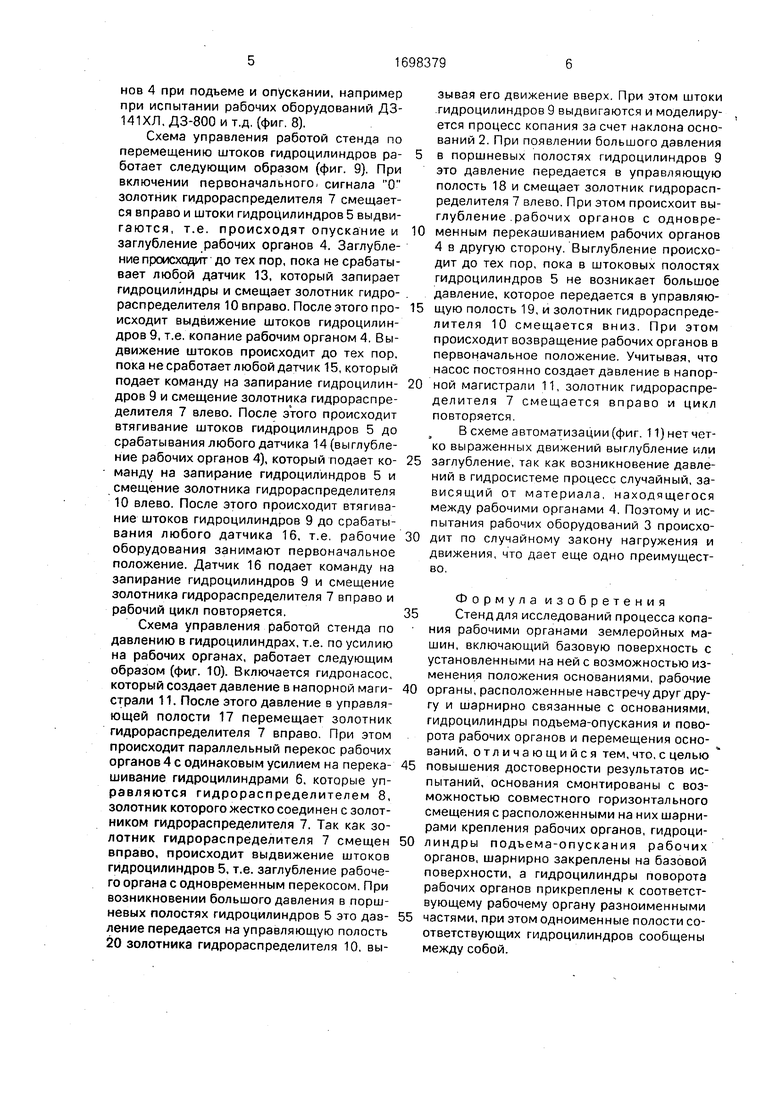
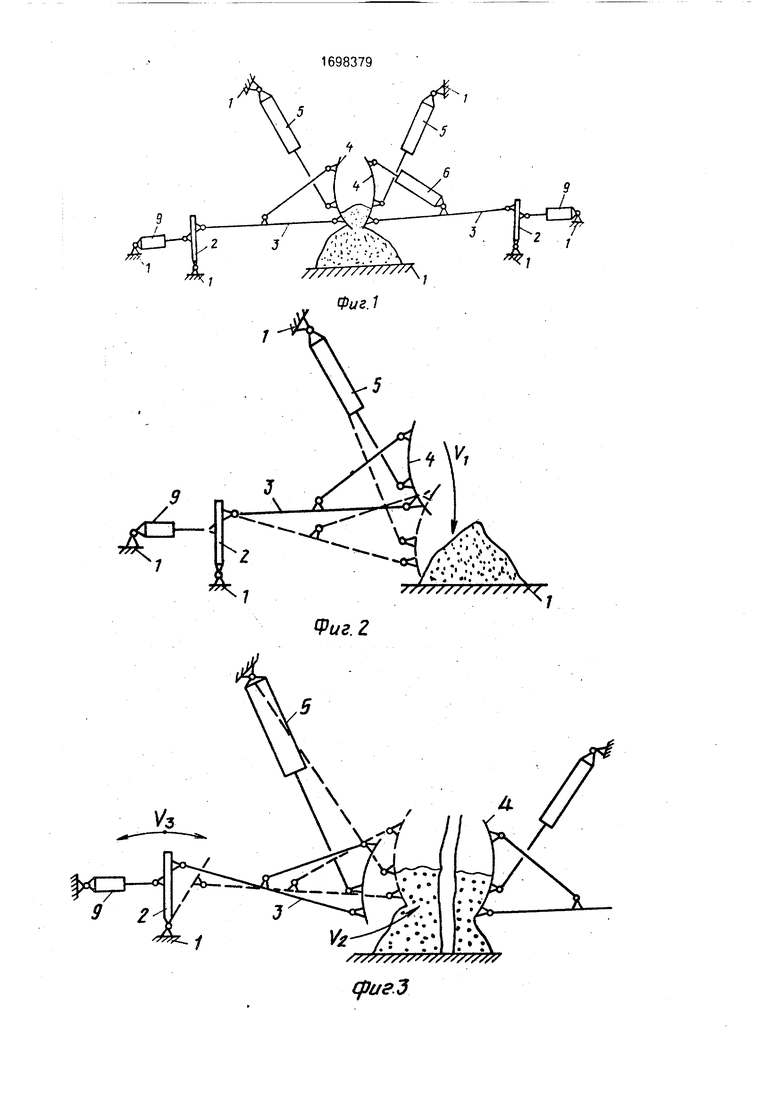
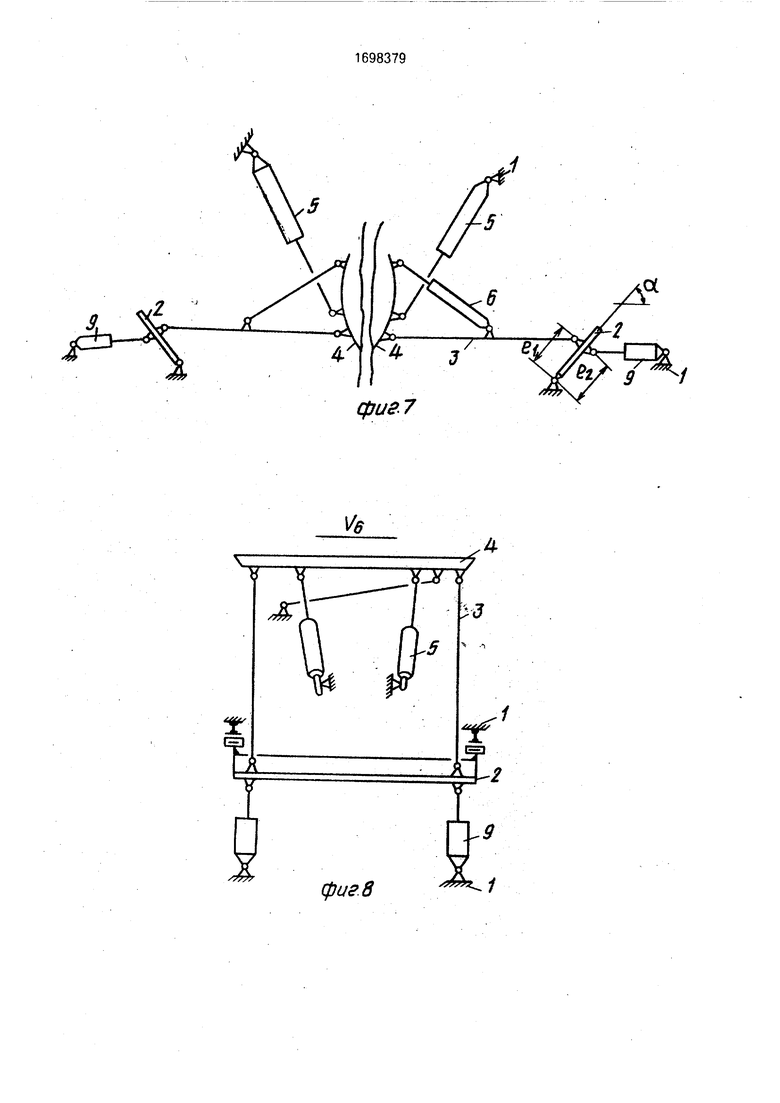
На фиг. 1 показан стенд, вид сбоку; на фиг. 2 - половина стенда с начальной траекторией рабочего органа; на фиг. 3 - промежуточное положение рабочего органа; на фиг. 4 - стенд с поступательным механизмом передвижения основания; на фиг. 5 - половина стенда, вид сверху; на фиг. 6 - стенд, вид сверху; на фиг. 7 - стенд с различным начальным углом наклона основания и
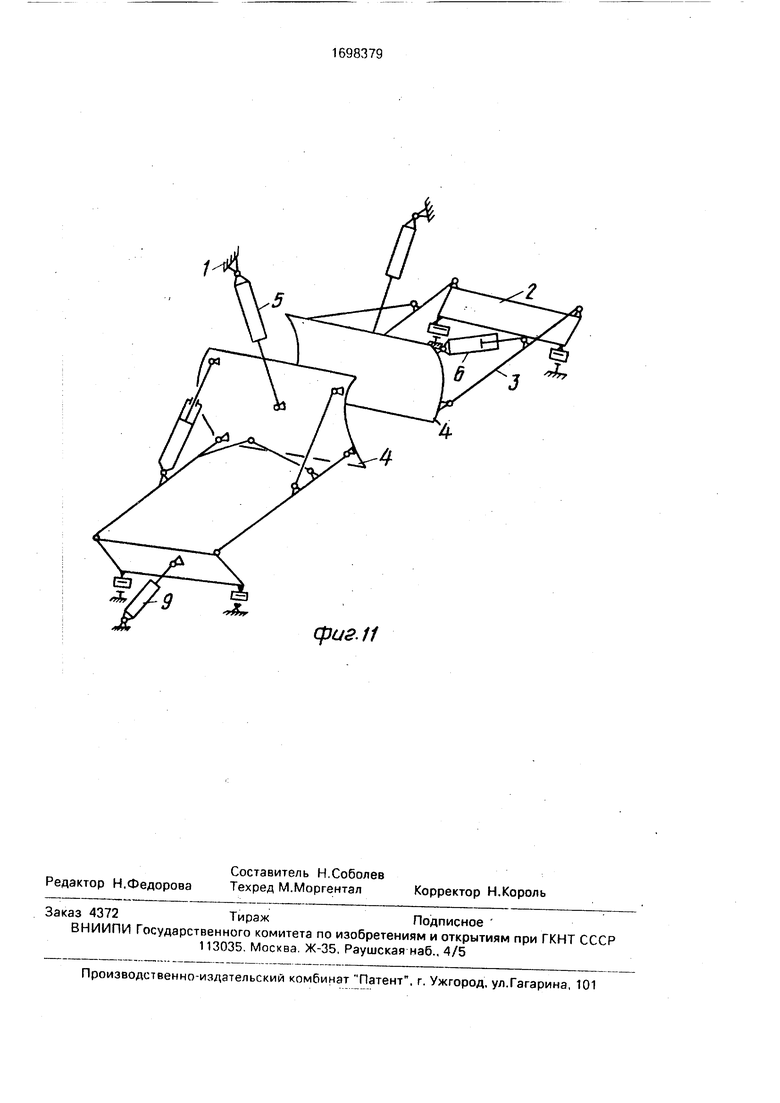
эксцентриситетами, вид сбоку; на фиг. 8 - половина стенда с вариантом рабочего органа, вид сверху; на фиг. 9 - гидросхема стенда с управлением по перемещению штоков гидроцилиндров; на фиг. 10 - гидросхема стенда с управлением по давлению в полостях гидроцилиндров стенда; на фиг, 11 - стенд в изометрии.
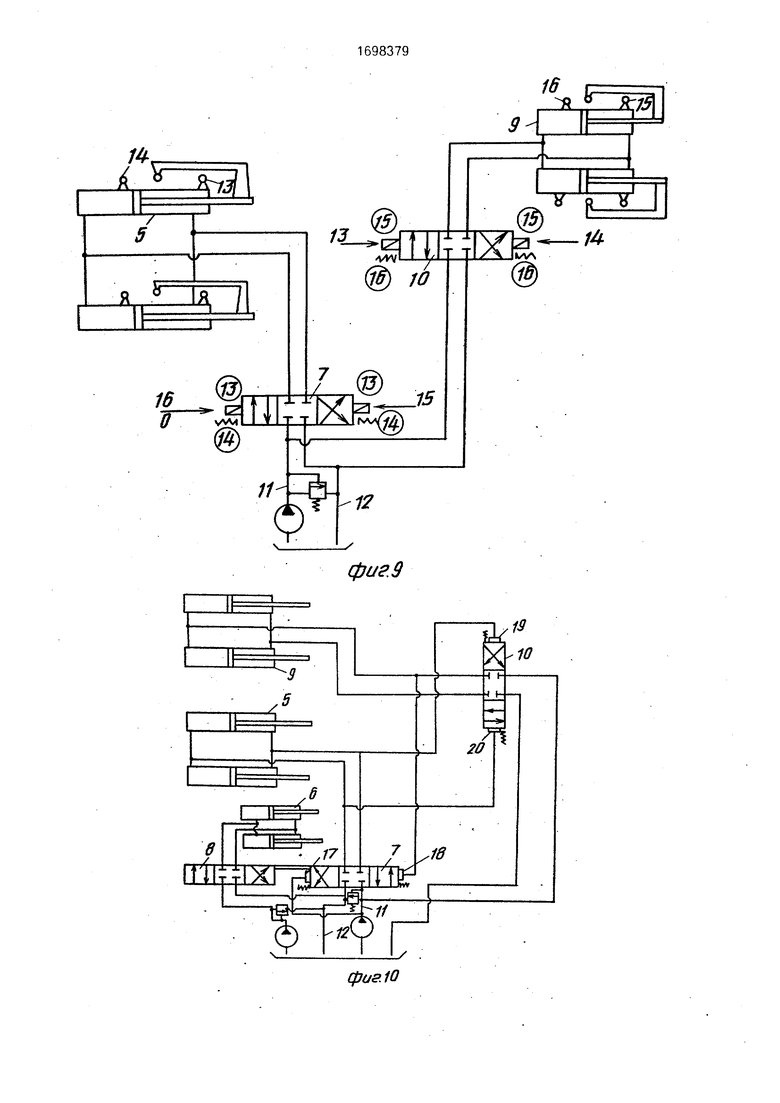
Стенд включает базовую поверхность 1, основания 2 с установленными на них рабочими оборудованиями 3 с ориентацией рабочих органов 4, например отвалов, навстречу друг другу с гидроцилиндрами управления подъема-опускания 5 и поворота 6 рабочих органов 4 в вертикальной плоскости (перекос отвала) со своими гидрораспределителями 7 и 8 соответственно. Механизм передвижения оснований включает гидроцилиндры 9 со своим гидрораспределителем 10. Стенд имеет также напорную 11 и сливную 12 магистрали. Гидроцилиндры 5 крепятся к базовой поверхности 1. Одноименные полости одноименных гидроцилиндров 5, б и 9 соединены между собой трубопроводами для уравновешивания усилий на испытываемые рабочие оборудования. На стенде использована следующая система управления. Гидрораспределители 7 гидроцилиндров 5 и гидрораспределители 10 гидроцилиндров 9 передвижения выполнены управляемыми отдатчиков 13,14, 15 и 16 крайнего положения штоков гидроцилиндров, на которые они установлены. Датчики 13, 14, 15 и 16, установленные на одноименных с гидрораспределителями гидроцилиндрах, управляют отключением этих гидрораспределителей, т.е. при срабатывании одного из датчиков 13 или 14 гидрораспределитель 7 отключает свои гидроцилиндры 5 (устанавливается в среднее положение), а при срабатывании одного из датчиков 15 или 16 гидрораспределитель 10 устанавливается в среднее положение и отключает гидроцилиндры 9 передвижения от напорной 11 и сливной 12 магистралей. Датчики 13-16 управляют включением разноименных гидро- распределителей, с гидроцилиндрами, на которых они установлены, т.е. при срабатывании датчика 13, когда шток одного из гидроцилиндров 5 максимально выдвинут, подается сигнал на гидрораспределитель 10 и золотник этого гидрораспределителя смещается вправо и т.д. Гидроцилиндры 6 поворота рабочих органов 4 в вертикальной плоскости крепятся разноименными концами каждый к своему рабочему органу 4, т.е. один гидроцилиндр 6 крепится к рабочему органу штоковым концом, а другой - гильзой. Это сделано для того, чтобы при повороте рабочих органов в вертикальной плоскости (перекашивании) усилие при параллельном друг другу перекачивании рабочих органов 4 было бы одинаковым в силу равенства площадей полостей гидроцилиндров 6. На равном стенде может быть использована другая система управления. Золотник гидрораспределителя 8 гидроцилиндров 6 жестко соединен с золотником гидрораспределителя 7 гидроцилиндров5. Гидрораспределители 7 и 10 имеют управляющие полости 17-20 соответственно. При этом управляющая полость 17 гидрораспределителя 7 соединена с напорной магистралью 11, а
управляющая полость 18 соединена с поршневыми полостями гидроцилиндров 9 передвижения. Управляющая полость 19 гидрораспределителя 10 соединена со штоковыми полостями гидроцилиндров 5, а
управляющая полость 20 соединена с поршневыми полостями гидроцилиндров 5. Стенд работает следующим образом Между рабочими органами 4 засыпается щебень или другой материал, моделирующий наиболее неблагоприятный грунт
(фиг. 1). После этого гидроцилиндрами 5 рабочие органы 4 опускаются, совершая вращательное движение Vi (фиг. 2) заглубляются. Затем гидроцилиндрами 9
рабочие органы 4 совершают движение V2 - копание. Основания 2 при этом прокачиваются (движение Va), что вызывает качатель- ное движение рабочих органов 4 (фиг. 3). Если основания 2 находятся в направляющих (фиг, 4), то качение рабочих органов происходит более пологого (движения , Vs). После этого штоки гидроцилиндров 5 втягиваются - выглубление рабочих органов 4, затем втягиваются штоки гидроцилиндров 9 - рабочие органы принимают первоначальное положение. После этого рабочий цикл испытаний повторяется. Гидроцилиндры 5, 6 и 9 могут работать одновременно, воспроизводя любой закон движения рабочих органов 4 В силу того, что одноименные полости одноименных гидроцилиндров соединены друг с другом, усилия, развиваемые этими гидроцилиндрами, равны, и следовательно, усилия на рабочих органах 4 также
равны. При этом достигается идентичность условий испытаний рабочих оборудований 3, так как гидроцилиндры 5, 6 и 9 постоянно работают, то усилия и углы вращения в шарнирах также меняются. Этим достигается
испытание узлов трения оборудования на износ. На стенде могут испытываться также и рабочие оборудования 3 с косоустанов- ленными рабочими органами 4 (фиг. 6). Изо- бретение позволяет моделировать дополнительное движение Ve рабочих органов 4 при подъеме и опускании, например при испытании рабочих оборудований ДЗ- 141ХЛ, ДЗ-800 и т.д. (фиг. 8).
Схема управления работой стенда по перемещению штоков гидроцилиндров работает следующим образом (фиг. 9). При включении первоначального, сигнала О золотник гидрораспределителя 7 смещается вправо и штоки гидроцилиндров 5 выдвигаются, т.е. происходят опускание и заглубление рабочих органов 4. Заглубление происходит до тех пор, пока не срабатывает любой датчик 13, который запирает гидроцилиндры и смещает золотник гидрораспределителя 10 вправо. После этого происходит выдвижение штоков гидроцилиндров 9, т.е. копание рабочим органом 4. Выдвижение штоков происходит до тех пор, пока не сработает любой датчик 15, который подает команду на запирание гидроцилиндров 9 и смещение золотника гидрораспределителя 7 влево. После этого происходит втягивание штоков гидроцилиндров 5 до срабатывания любого датчика 14 (выглубле- ние рабочих органов 4), который подает команду на запирание гидроцилиндров 5 и смещение золотника гидрораспределителя 10 влево. После этого происходит втягивание штоков гидроцилиндров 9 до срабатывания любого датчика 16, т.е. рабочие оборудования занимают первоначальное положение. Датчик 16 подает команду на запирание гидроцилиндров 9 и смещение золотника гидрораспределителя 7 вправо и рабочий цикл повторяется.
Схема управления работой стенда по давлению в гидроцилиндрах, т.е. по усилию на рабочих органах, работает следующим образом (фиг. 10). Включается гидронасос, который создает давление в напорной магистрали 11. После этого давление в управляющей полости 17 перемещает золотник гидрораспределителя 7 вправо. При этом происходит параллельный перекос рабочих органов 4 с одинаковым усилием на перекашивание гидроцилиндрами 6. которые управляются гидрораспределителем 8, золотник которого жестко соединен с золотником гидрораспределителя 7. Так как золотник гидрораспределителя 7 смещен вправо, происходит выдвижение штоков гидроцилиндров 5, т.е. заглубление рабочего органа с одновременным перекосом. При возникновении большого давления в поршневых полостях гидроцилиндров 5 это давление передается на управляющую полость 20 золотника гидрораспределителя 10, вызывая его движение вверх. При этом штоки гидроцилиндров 9 выдвигаются и моделиру- , ется процесс копания за счет наклона оснований 2. При появлении большого давления
5 в поршневых полостях гидроцилиндров 9 это давление передается в управляющую полость 18 и смещает золотник гидрораспределителя 7 влево. При этом происхоит вы- глубление рабочих органов с одновре0 менным перекашиванием рабочих органов 4 в другую сторону. Выглубление происходит до тех пор, пока в штоковых полостях гидроцилиндров 5 не возникает большое давление, которое передается в управляю5 щую полость 19, и золотник гидрораспределителя 10 смещается вниз. При этом происходит возвращение рабочих органов в первоначальное положение. Учитывая, что насос постоянно создает давление в напор0 ной магистрали 11, золотник гидрораспределителя 7 смещается вправо и цикл повторяется.
В схеме автоматизации (фиг. 11) нет четко выраженных движений выглубление или
5 заглубление, так как возникновение давлений в гидросистеме процесс случайный, зависящий от материала, находящегося между рабочими органами 4. Поэтому и испытания рабочих оборудований 3 происхо0 дит по случайному закону нагружения и движения, что дает еще одно преимущество.
Формула изобретения
5Стенддля исследований процесса копа ния рабочими органами землеройных машин, включающий базовую поверхность с установленными на ней с возможностью изменения положения основаниями, рабочие
0 органы, расположенные навстречу друг другу и шарнирно связанные с основаниями, гидроцилиндры подьема-опускания и поворота рабочих органов и перемещения оснований, отличающийся тем, что, с целью
5 повышения достоверности результатов испытаний, основания смонтированы с возможностью совместного горизонтального смещения с расположенными на них шарнирами крепления рабочих органов, гидроци0 линдры подъема-опускания рабочих органов, шарнирно закреплены на базовой поверхности, а гидроцилиндры поворота рабочих органов прикреплены к соответствующему рабочему органу разноименными
5 частями, при этом одноименные полости соответствующих гидроцилиндров сообщены между собой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод рабочего оборудования бульдозера двустороннего действия | 1988 |
|
SU1602956A1 |
| Гидропривод рабочего органа бульдозера | 1990 |
|
SU1763592A1 |
| Стенд для испытания автогрейдера | 1989 |
|
SU1647336A1 |
| Гидросистема управления рабочим органом бульдозера | 1985 |
|
SU1240840A1 |
| Гидропривод землеройной машины | 1989 |
|
SU1671803A1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Бульдозер | 1987 |
|
SU1491973A2 |
| Способ автоматического управления рабочим органом землеройной машины | 1990 |
|
SU1776732A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИЦЕПНОГО СКРЕПЕРА | 2010 |
|
RU2485252C2 |
| Устройство для программного регулирования процессом копания бульдозера | 1979 |
|
SU932859A1 |
Изобретение относится к оборудованию для стендовых испытаний землеройных машин. Цель - повышение достоверности результатов испытаний. Стенд содержит базовую поверхность 1 с установленными на ней с возможностью перемещения основаниями 2. с которыми шарнирно соединено испытуемое рабочее оборудование - отвалы 4 бульдозера, установленные навстречу друг другу. Отвалы 4 управляются гидроцилиндрами (ГЦ) подъема опускания 5 .и поворота 6. Основание, вместе с закрепленным на нем шарниром соединения отвала 4 перемещается ГЦ 9. При этом ГЦ 5 прикреплены к отвалу 4 разноименными частями на один - штоком, а на другой - гильзой. Между рабочими органами отвалами 4 засыпается щебень или другой материал. После этого ГЦ 5 отвалы 4 заглубляются. Затем ГЦ 9 перемещают отвалы 4, совершая операцию копания. Основания 2 при этом прокачивают, обеспечивая касательное движение отвалов 4. После этого ГЦ 5 втягиваются, обеспечивая выглубление отвалов 4. Затем втягиваются ГЦ 9, обеспечивая первоначальное положение. Далее цикл повторяется. В процессе манипуляций производятся замеры. При включении в цикл перемещений отвала его перекос включают в работу ГЦ 6. Сообщение между собой одноименных полостей соответствующих ГЦ обеспечивает равное их усилие при взаимодействии отвалов 4. 11 ил. О Ю оо GJ XI Ю
Фиг. 2
9
k/
S/rSSSS S / S S s/ S/ SS/ SSi S
фие.З
/Гтffsarssfss
Z/
фигЛ
фиг.5
ГГТ0
1
н
фиг. 6
,
3&
/yfss
Ј&Ј/
I
фиг. 8
фиг 7
SSS/fj
3-,
1
фиг.9
фиг. Ю
9frJP
(fus.11
&
| СТЕНД ДЛЯ ИСПЫТАНИЯ МЕТАЛЛОКОНСТРУКЦИЙ СТРОИТЕЛЬНЫХ И ДОРОЖНЫХ МАШИН | 0 |
|
SU377664A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Стенд для испытаний рабочего оборудования землеройной машины | 1987 |
|
SU1471103A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
