Изобретение относится к землеройно- транспортным машинам.
Известен способ автоматического управления рабочим органом землеройной машины, заключающийся в том, что определяют действительную скорость землеройной машины датчиком, установленным на продольной оси машины, определяют теоретическую скорость по оборотам ведущей звездочки, после чего определяют буксование и по величине буксования воздействуют на механизм подъема и опускания отвала (см. проспект фирмы Комацу на бульдозер Д555).
Недостатком известного способа является невозможность учета изменения заднего угла при заглублении и выглублении рабочего органа - отвала, что приводит к утыканию задней поверхности отвала в грунт. Это снижает усилие заглубления отвала и уменьшает производительность бульдозера.
Известен также способ автоматического управления рабочим органом землеройной машины, заключающийся в том, что измеряют действительную скорость каждого борта, по результатам измерений находят среднюю действительную скорость машины, определяют теоретическую скорость, вычисляют буксование, в зависимости от величины которого воздействуют на механизм подъема и опускания рабочего органа. Кроме того, определяют отношение действительных скоростей левого и правого бортов, по результатам которого воздействуют на механизм стабилизации скоростей бортов (см. заявку № 3903645/03, положительное решение от 10.10.85).
Недостатком этого способа является невозможность учета изменения геометрии рабочего органа относительно направления движения Землеройной машины при подъеме, опускании и перекосе рабочего органа. При этом рабочий орган занимает не оптимальное для данных условий положение, возможно утыкание задней поверхности рабочего органа в грунт при заглублении рабочего органа и недобор (потеря) призмы грунта при выглублении рабочего органа. Это уменьшает производительность землеройной машины.
Цель изобретения - повышение производительности путем поддержания заднего угла рабочего органа при перекашивании, заглублении и выглублении рабочего органа в оптимальных пределах.
Для этого в способе автоматического управления рабочим органом землеройной машины, заключающемся в том,что измеряют скорость движения землеройной машины, по которой определяют среднюю действительную скорость машины, при заглублении отвала определяют скорость опускания рабочего органа и направление движения
5 землеройной машины и по отношению векторов скорости опускания рабочего органа и средней действительной скорости машины определяют угол направления движения рабочего органа относительно направления
10 движения базовой машины, определяют положение рабочего органа относительно базовой машины и по нему определяют задний угол рабочего органа относительно направления движения базовой машины,
15 сравнивают задний угол рабочего органа с углом направления движения рабочего органа, задают запас по заднему углу и, если задний угол рабочего органа меньше угла направления движения рабочего органа с
20 учетом запаса по заднему углу, увеличивают задний угол, если задний угол рабочего органа равен максимальному значению, то увеличивают скорость движения землеройной машины или уменьшают скорость опу25 екания рабочего органа, если задний угол рабочего органа больше угла направления движения рабочего органа с учетом запаса по заднему углу, то уменьшают задний угол, если задний угол рабочего органа равен ми30 нимальному значению, то уменьшают скорость движения землеройной машины или увеличивают скорость опускания рабочего органа, а при выглублении рабочего органа определяют скорость выглубления рабочего
35 органа и направление движения землеройной машины и по отношению векторов скорости выглубления рабочего органа к средней действительной скорости машины on редел я ют у гол направления движения ра40 бочего органа относительно направления движения базовой машины, по положению рабочего органа относительно землеройной машины определяют задний угол рабочего органа относительно направления
45 движения рабочего органа, задают запас по заднему углу, сравнивают задний угол рабочего органа с углом направления движения рабочего органа, если задний угол рабочего органа меньше угла направления движения
50 рабочего органа с учетом запаса по заднему углу, то увеличивают задний угол, если задний угол рабочего органа равен максимальному значению, то уменьшают скорость движения землеройной машины или увеличивают скорость подъема рабоче55 го органа, если задний угол рабочего органа больше угла направления движения с учетом запаса по заднему углу, то уменьшают задний угол, если задний угол рабочего ор- тана равен минимальному значению, то увеличивают скорость движения землеройной машины или уменьшают скорость подъема рабочего органа.
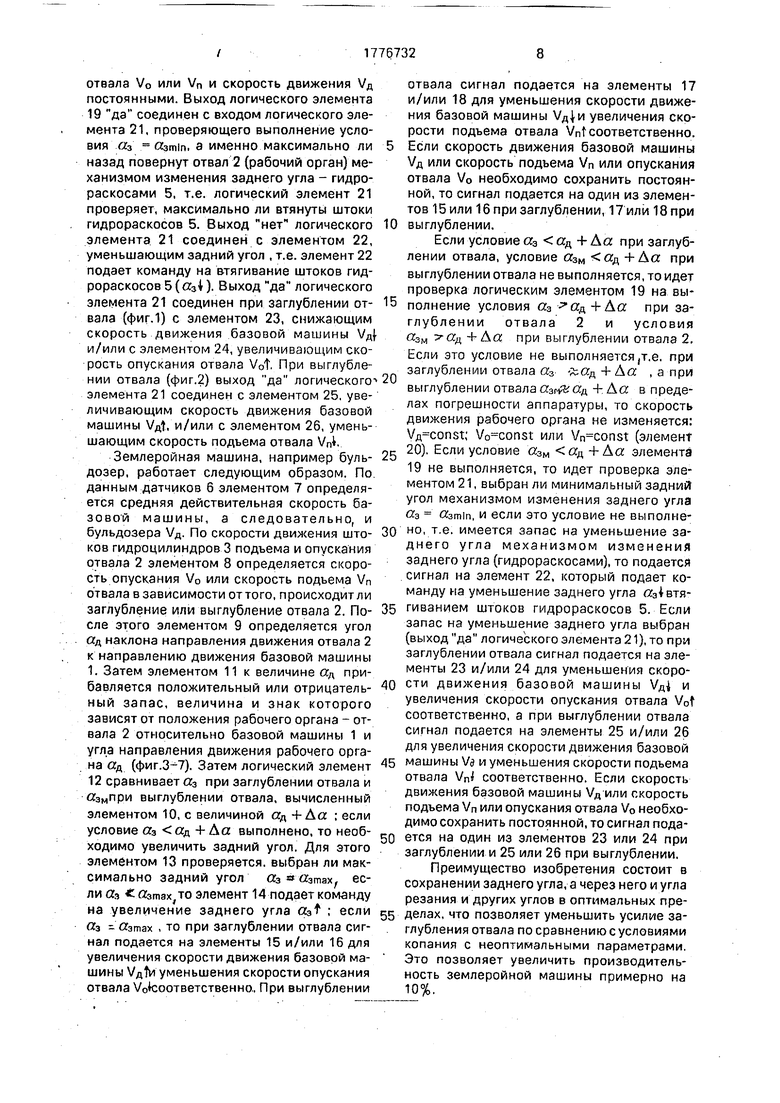
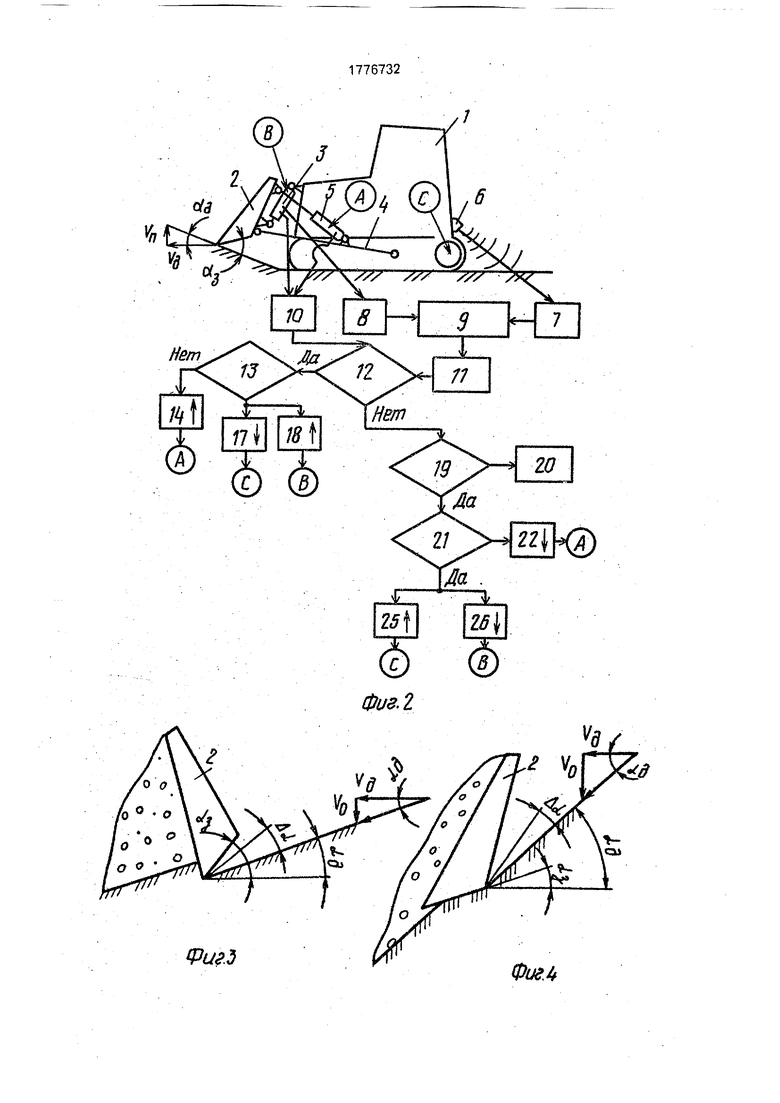
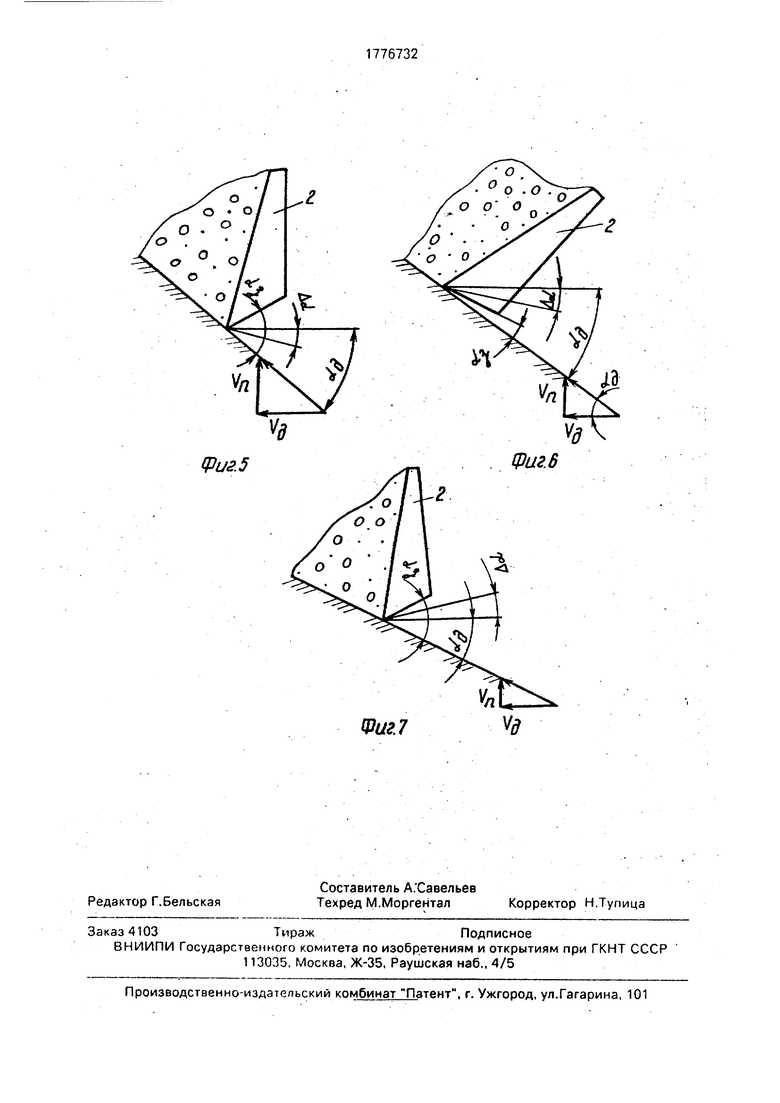
На фиг.1 схематично показана землеройная машина, в частности бульдозер, при опускании рабочего органа-отвала; на фиг.2 - то же, при подъеме отвала; на фиг.З - положение отвала при заглублении, когда завышен задний угол; на фиг.4 - то же, при заниженном заднем угле; на фиг.5 - быстрое выглубление отвала при завышенном заднем угле; на фиг.6 - то же, при заниженном заднем угле;на фиг.7 - медленное выглубление отвала при завышенном заднем угле.
Землеройная машина, например бульдозер, на котором реализован предлагаемый способ, содержит базовую машину 1 с рабочим оборудованием (бульдозерным оборудованием), состоящим из отвала 2, гидроцилиндров 3 подъема и опускания отвала. Толкающие брусья 4 крепятся обычным образом к базовой машине 1 и отвалу 2. Механизм изменения заднего угла выполнен в виде двух гидрораскосов 5. Перекос отвала в вертикальной поперечной плоскости достигается разнонаправленным движением штоков гидрораскосов 5 или движением штока одного из гидрораскосов 5. По бортам базовой машины 1 установлены специальные измерители 6 действитель- ной скорости каждого борта, определяющие среднюю действительную скорость базовой машины Уд, измерителем которой является элемент 7.
По скорости движения штоков гидроцилиндров 3 подъема и опускания отвала элемент 8 определяет скорость опускания V0 и подъема Vn отвала 2. К элементам 7 и 8 подсоединен элемент 9. определяющий угол «д направления движения рабочего органа-отвала 2 относительно направления движения базовой машины (вектора средней действительной скорости Уд) по формуле ад arctg ту- или arctg тр . Элемент
10 подсоединен к датчикам перемещения штоков гидроцилиндров 3 подъема и опускания отвала 2 и гидрораскосов 5 и определяет задний угол «з рабочего органа относительно направления движения базовой машины Уд (фиг.1) при ззглублении отвала. Этот элемент 10 учитывает изменение заднего угла рабочего органа - отвала 2 при его подъеме, опускании, перекосе и при одновременном выдвижении или втягивании штоков гидрораскосов 5. При сыглублении отвала (фиг.2) элементом 10 задний угол рабочего органа -отвала 2 определяется отно0
5
0
5
0
5
0
5
0
5
сительно направления движения рабочего органа - отвала 2 (угол а3м ).
К элементу 9, определяющему угол ад , подсоединен элемент 11, складывающий значение угла Од и запас по заднему углу, зависящий от положения рабочего органа относительно базовой машины и угла ад направления движения рабочего органа. Запас по заднему углу Да может быть как положительный (фиг.3,4,7), так и отрицательный (фиг.5,6), в зависимости от направления движения рабочего органа. Запас До: положителен всегда при заглублении отвала и может быть отрицателен при быстром выглублении отвала, так как при быстром выглублении отвала необходимо сохранить призму волочения грунта максимальной. В зависимости от положения рабочего органа относительно базовой машины, например при перекосе, угол заострения рабочего органа меняется, меняется и задний угол, что вызывает необходимость корректировки запаса Да . К элементам 10 и 11 подсоединен логический элемент 12, проверяющий условие аз Од + Да при заглублении отвала 2 и условие с:3м Од + Да при выглублении отвала 2. Выход да элемента 12 соединен с логическим элементом 13, проверяющим выполнение условия а3 - сектах , т.е максимально ли наклонен отвал 2 вперед по положению штоков гидрораскосов 5. Выход нет логического элемента 13 соединен с элементом 14, подающим команду на увеличение угла резания a3t, после чего сигнал подается на управление гидрораскосами 5. Выход да логического элемента 13, показывающий, что штоки гидрораскосов выдвинуты максимально, соединен при заглублении отвала 2 (фиг.1) с элементами 15 и 16-с одним из них или с обоими. Элемент 15 подает сигнал на увеличение скорости движения базовой машины Уд а элемент 16 подает сигнал на снижение скорости опускания отвала 2У0 . При выглублении отвала 2 (фиг.2) выход да соединен с элементами 17 и 18 - с одним из них или с обоими. Элемент 17 подает сигнал на снижение скорости движения базовой машины Уд, а элемент 18 подает сигнал на увеличение скорости подъема отвала УПТ. Выход нет логического элемента 12 соединен с логическим элементом 19, проверяющим выполнение условия «з огд Ч-А« при заглублении отеала, а при выглублении отвала - выполнение условия 2зм СГд + Да . Выход нет логического элемента 19 соединен с устройством 20, поддерживающим скорость движения штоков гидроцилиндров 3 подъема и опускания
отвала V0 или Vn и скорость движения Уд постоянными. Выход логического элемента 19 да соединен с входом логического элемента 21, проверяющего выполнение условия «з . а именно максимально ли назад повернут отвал 2 (рабочий орган) механизмом изменения заднего угла - гидрораскосами 5, т.е. логический элемент 21 проверяет, максимально ли втянуты штоки гидрораскосов 5. Выход нет логического элемента 21 соединен с элементом 22, уменьшающим задний угол , т.е. элемент 22 подает команду на втягивание штоков гидрораскосов 5 (a3i ) Выход да логического элемента 21 соединен при заглублении от- вала (фиг.1) с элементом 23, снижающим скорость движения базовой машины Уд{ и/или с элементом 24, увеличивающим скорость опускания отвала Vot. При выглубле- нии отвала (фиг.2) выход да логического элемента 21 соединен с элементом 25. увеличивающим скорость движения базовой машины УД1, и/или с элементом 26, уменьшающим скорость подъема отвала Vni.
Землеройная машина, например буль- дозер, работает следующим образом. По данным датчиков 6 элементом 7 определяется средняя действительная скорость базовой машины, а следовательно, и бульдозера Уд. По скорости движения што- ков гидроцилиндров 3 подъема и опускания отвала 2 элементом 8 определяется скорость опускания V0 или скорость подъема Vn отвала в зависимости от того, происходит ли заглубление или выглубление отвала 2. По- еле этого элементом 9 определяется угол Од наклона направления движения отвала 2 к направлению движения базовой машины 1. Затем элементом 11 к величине ад прибавляется положительный или отрицатель- ный запас, величина и знак которого зависят от положения рабочего органа - отвала 2 относительно базовой машины 1 и угла направления движения рабочего органа 2д (фиг.3-7). Затем логический элемент 12 сравнивает а3 при заглублении отвала и а3мпри выглублении отвала, вычисленный элементом 10, с величиной ад + Да ; если условие а3 ая + Да выполнено, то необ- ходимо увеличить задний угол. Для этого элементом 13 проверяется, выбран ли максимально Задний УГОЛ «з « аэтах, 6С- ли из Озтах то элемент 14 подает команду на увеличение заднего угла Oaf ; если «з - аэтах , то при заглублении отвала сигнал подается на элементы 15 и/или 16 для увеличения скорости движения базовой машины УдТи уменьшения скорости опускания отвала Уо соответственно. При выглублении
отвала сигнал подается на элементы 17 и/или 18 для уменьшения скорости движения базовой машины увеличения скорости подъема отвала Vnt соответственно. Если скорость движения базовой машины Уд или скорость подъема Vn или опускания отвала V0 необходимо сохранить постоянной, то сигнал подается на один из элементов 15 или 16 при заглублении, 17 или 18 при выглублении.
Если условие аэ ад + Да при заглублении отвала, условие а3м «д + Да при выглублении отвала не выполняется, то идет проверка логическим элементом 19 на выполнение условия аэ - ОдН-Да при заглублении отвала 2 и условия а3м уак + Да при выглублении отвала 2. Если это условие не выполняется(т.е. при заглублении отвала а3 ад + Да , а при выглублении отвала + Да в пределах погрешности аппаратуры, то скорость движения рабочего органа не изменяется: Vfl const; Vo const или Vn const (элемент 20). Если условие а3м ад 4-Да элемента 19 не выполняется, то идет проверка элементом 21, выбран ли минимальный задний угол механизмом изменения заднего угла а3 cCsmin, и если это условие не выполнено, т.е. имеется запас на уменьшение заднего угла механизмом изменения заднего угла (гидрораскосами), то подается сигнал на элемент 22, который подает команду на уменьшение заднего угла а31 втягиванием штоков гидрораскосов 5. Если запас на уменьшение заднего угла выбран (выход да логического элемента 21), то при заглублении отвала сигнал подается на элементы 23 и/или 24 для уменьшения скорости движения базовой машины Уд| и увеличения скорости опускания отвала V0t соответственно, а при выглублении отвала сигнал подается на элементы 25 и/или 26 для увеличения скорости движения базовой машины Уз и уменьшения скорости подьема отвала VnJ соответственно. Если скорость движения базовой машины Уд или скорость подъема Уп или опускания отвала У0 необходимо сохранить постоянной, то сигнал подается на один из элементов 23 или 24 при заглублении и 25 или 26 при выглублении.
Преимущество изобретения состоит в сохранении заднего угла, а через него и угла резания и других углов в оптимальных пределах, что позволяет уменьшить усилие заглубления отвала по сравнению с условиями копания с неоптимальными параметрами. Это позволяет увеличить производительность землеройной машины примерно на 10%.
Формула изобретения Способ автоматического управления рабочим органом землеройной машины, заключающийся в том, что измеряют скорость движения землеройной машины, по которой определяют среднюю действительную скорость машины, отличающийся тем. тем, что с целью повышения производительности путем поддержания заднего угла рабочего органа при перекашивании, заглублении и выглублении рабочего органа в оптимальных пределах, при заглублении отвала определяют скорость опускания рабочего органа и направление движения зем- леройной машины и по отношению векторов скорости опускания рабочего органа и средней действительной скорости машины о преде л я ют у го л направления движения рабочего органа относительно направления движения базовой машины, определяют положение рабочего органа относительно базовой машины и по нему определяют задний угол рабочего органа относительно направления движения базовой машины, сравнивают задний угол рабочего органа с углом направления движения рабочего органа,задают запас по заднему углу, и, если задний угол рабочего органа меньше угла направления движения рабочего органа с учетом запаса по заднему углу, то увеличивают задний угол, если задний угол рабочего органа равен максимальному значению, то увеличивают скорость движения землеройной машины или уменьшают скорость опускания рабочего органа, если задний угол рабочего органа больше угла направления движения рабочего органа с
учетом запаса по заднему углу, то уменьшают задний угол, если задний угол рабочего органа равен минимальному значению, то уменьшают скорость движения землерой- 5 ной машины или увеличивают скорость опускания рабочего органа, а при выглублении рабочего органа определяют скорость вы- глубления рабочего органа и направление движения землеройной машины и по отно0 шению векторов скорости выглубления рабочего органа к средней действительной скорости машины определяют угол направления движения рабочего органа относительно направления движения базовой
5 машины, по положению рабочего органа относительно землеройной машины определяют задний угол рабочего органа относительно направления движения рабочего органа, задают запас по заднему углу,
0 сравнивают задний угол рабочего органа с углом направления движения рабочего органа, если задний угол рабочего органа меньше угла направления движения рабочего органа с учетом запаса по заднему углу,
5 то увеличивают задний угол, если задний угол рабочего органа равен максимальному значению, то уменьшают скорость движения землеройной машины или увеличивают скорость подьема рабочего органа, если за0 дний угол рабочего органа больше угла направления движения с учетом запаса по заднему углу, то уменьшают задний угол, если задний угол рабочего органа равен минимальному значению, то увеличивают ско5 рость движения землеройной машины, или уменьшают скорость подьема рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления работой бульдозера | 1990 |
|
SU1810441A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
| Способ автоматического управления работой бульдозера | 1985 |
|
SU1265259A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Землеройная машина | 1983 |
|
SU1138462A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| Гидропривод бульдозера | 1984 |
|
SU1234540A1 |
| Бульдозер | 1985 |
|
SU1361256A1 |
| БУЛЬДОЗЕР С ПЕРЕКИДНЫМ ОТВАЛОМ | 1995 |
|
RU2085663C1 |

Изобретение относится к землеройно- транспортным машинам, При заглублении отвала определяют скорость опускания рабочего органа и направление движения землеройной машины и по отношению векторов скорости опускания рабочего органа и средней действительной скорости машины определяют угол направления движения рабочего органа относительно направления движения базовой машинн. Определяют положение рабочего органа относительно базовой машины и по нему определяют задний угол рабочзго органа относительно направления движения базовой машины, сравнивают задний угол рабочего органа с углом направления движения рабочего органа, задают запас по заднему углу. Если задний угол рабочего органа меньше угла направления движения рабочего органа с учетом запаса по заднему углу, то-уве- личивают задний УГОЛ; если задний угол рабочего органа равен максимальному значению, то увеличивают скорость движения землеройной машины или уменьшают ско2 рость опускания рабочего органа, если задний угол рабочего opiana больше угла направления движения рабочего органа с учетом запаса по заднему углу, то уменьшают задний угол; ei ли задний гол рабочего органа равен минимальному .значению, то уменьшают скорость движения землеройной машины или увеличивают скорость опускания рабочего органа. При вьнлублении рабочего определяют скорость вы- глубления рг.Осчею огана и направление движения землерплчой машины и по отношению векгооой скорости пыглубления рабочего органа ч сводней действительной скорости MduiMH определяют угол направления двйжьмил органа относительно напра П1я движения базовой машины. По поло а:ни:с рабочего органа относительно зеплсроиной машины опреде лягот задний чол рабочего органу относигельно изпрагнения движения рабочего органа, задают запас по заднему углу, соавнивают задний угол рабочего органа с углом направления движения рабочего органа. Если задний угол рабочею органа меньше угла направление движения рабочего органа с учетом ззплса по заднему углу, то увеличивают задний угол; если задний угол рабьего органа равен максимальному значению, то уменьшают скорость ДРЫЖОНИЯ зетероиной машины ити увеличивают скорость подтема рабочего органа; еслп з г пйуюл рабочею органа больше угпа направление движения с учетом запаса по г-однему углу ш уменьшают задний угол- если угог рабочею органа равзн минимальному значем -ю, т о увеличивают скорость двилонш гег леройной машины или уг. сннидюг скорость подъема рабочего органа, 7 ип. сл с «вес v|
ФигЗ
Да .
Ј Фиг. 2
Фиг4
Фиг. 5
W
Фиг. В
Фиг.7
| Способ автоматического управления работой бульдозера | 1985 |
|
SU1265259A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
