Изобретение относится к приборостроению и может быть использовано в устройствах автоматики.
Целью изобретения является расширение области применения для определения направления вращения за счет введения переключения режимов его работы.
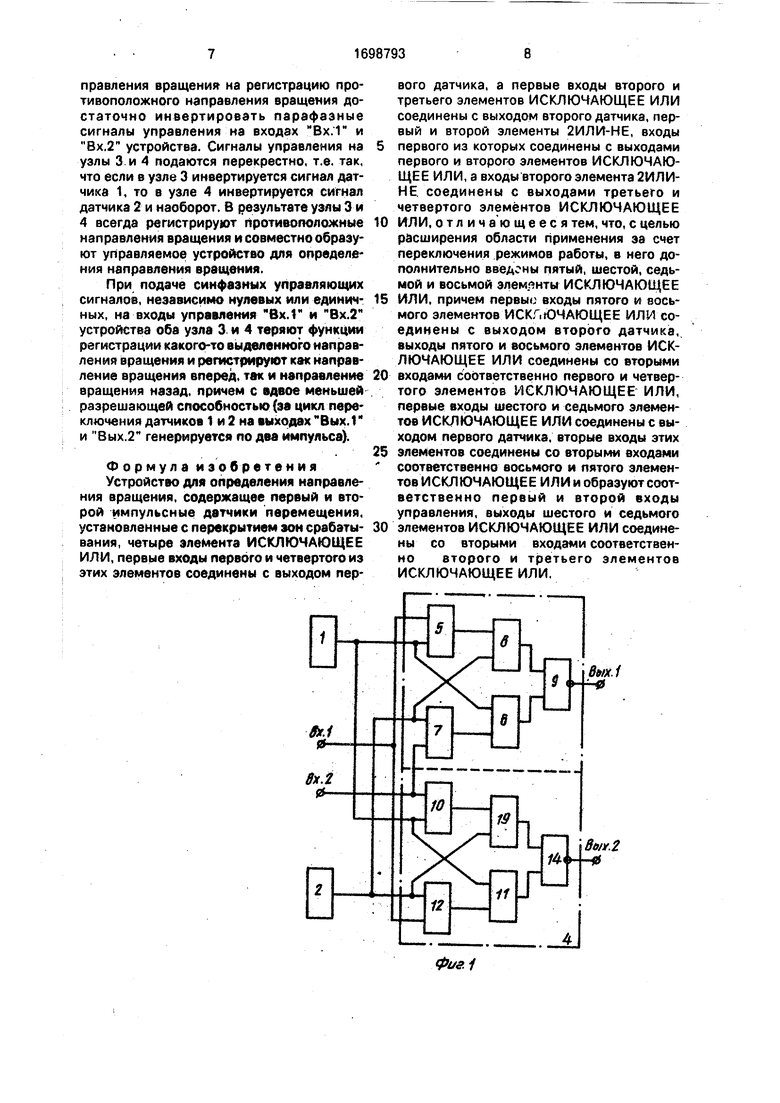
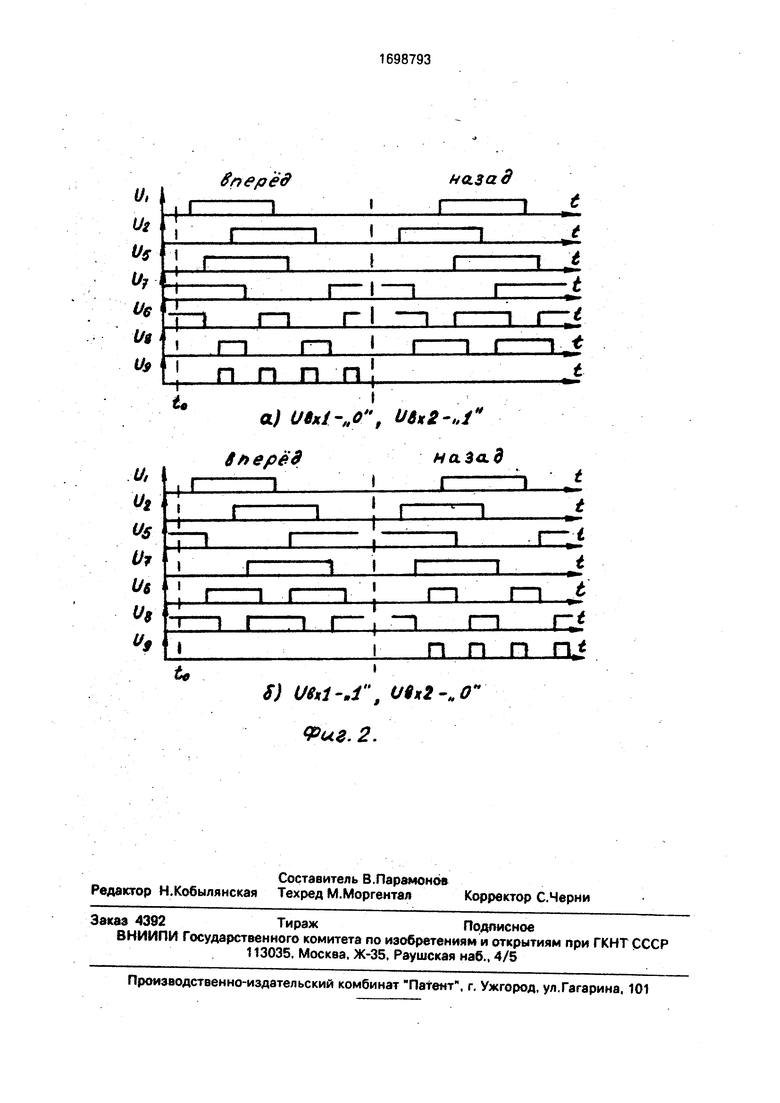
На фиг. 1 приведена электрическая схема устройства для определения направления вращения; на фиг. 2 - временные диаграммы его работы. (Временные диаграммы выполнены с учетом задержки сигналов элементами эжлектрической схемы в процессе их преобразования. На диаграммах представлены выходные сигналы элементов схемы, причем цифровой индекс в обозначении сигналов соответствует номеру элемента на фиг. 1),
Устройство содержит два импульсных датчика 1 и 2 перемещения, установленных с перекрытием зон срабатывания и два узла 3 и 4 регистрации направления вращения.
Узел 3 содержит четыре элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5, 6, 7 и 8, а также элемент 2ИЛИ-НЕ 9.
Узел 4 содержит четыре элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 10, 11, 12 и 13, а также элемент 2ИЛИ-НЕ 14.
Узлы 3 и 4 одинаковы, поэтому рассмотрим только узел 3, а номера соответствующих элементов узла 4 указаны в скобках, Первые входы элементов 5 (10) и 6 (11) ИСКЛЮЧАЮЩЕЕ ИЛИ соединены с выходом датчика 1. Первые входы элементов 7 (12) и 8 (13) ИСКЛЮЧАЮЩЕЕ.ИЛИ соединены с выходом датчика 2. Вторые входы элементов 5, 12 объединены и образуют первый вход Вх.1 управления, вторые входы эле- MeHjOB 7 и 10 соединены и образуют второй вход Вх.2 управления. Выход элемента 5 (10) соединен со вторым входом элемента 8 (13), выход элемента 7 (12) соединен со вторым входом элемента 6 (11), а выходы элементов б (11) и 8 (13) соединены со входами элемента 9 (14) 2ИЛИ-НЕ, выход которого является выходом Вых.1 (Вых.2) устройства.
Работу устройства рассмотрим на примере узла 3.
со
с
о ю
00
VI ю со
Устройство работает следующим образом.
Регистрация нужного направления вращения узлов 3 (4) задается внешними управляющими сигналами, подаваемыми на входы Вх. 1 и Вх.2 устройства. Предположим, что на Вх.Т подан нулевой сигнал Uexi, а на вход Вх.2 единичный UBx2- В этом случае элемент 5 (12) работает повторителем, а элемент 7 (10) инвертором. В исходном состоянии - момент времени to на фиг. 2 - датчики 1 и 2 выключены, выходные сигналы Us, Us, Us соответственно элементов 5,8 и 9 - нулевые, выходные сигналы UT, Ue элементов 7 и 6 - единичные.
При вращении вперед сначала включается датчик 1-е результате включается элемент 5 ИСКЛЮЧАЮЩЕЕ ИЛИ и выключается элемент 6 ИСКЛЮЧАЮЩЕЕ ИЛИ; включение элемента 5 приводит к включению элемента 8 ИСКЛЮЧАЮЩЕЕ ИЛИ. которое происходит с запаздыванием по отношению к выключению элемента 6 (фиг. 2а, вперед, Us, Ue, Us), поэтому единичные сигналы Ue и Us на входах элемента 9 2ИЛИ- НЕ во времени не перекрываются и на его выходе - Вых.1 - генерируется импульс (фиг.2а. вперед, Ue. Us, Us).
. При дальнейшем вращении вперед включается датчик 2 (фиг. 2а, «перед, Ua) результате выключаются элементы 7,8 ИСКЛЮЧАЮЩЕЕ ИЛИ; выключение элемента 7 приводит к включению элемента 6, которое происходит с запаздыванием по отношению к выключению элемента 8 (фиг. 2а, вперед, U, Ue, Ue), поэтому единичные сигналы Ue и Us на входах элемента 9 2ИЛИ-НЕ во времени не перекрываются и на его выходе генерируется импульс (фиг. 2а, вперед, Ue, Ue, Ug).
При дальнейшем вращении вперед выключается датчик 1 (фиг. 2а, вперед, Ui - в результате выключаются элементы 5 и б; выключение элемента 5 приводит к включению элемента 8, которое происходит с запаздыванием по отношению к выключению элемента 6 (фиг. 2а, вперед, Us, Ue. Us), поэтому единичные сигналы Ue и Us на входах элемента 9 2ИЛИ-НЕ во времени не перекрываются и на его выходе генерируется импульс, (фиг. 2а, вперед Ue. Ue, Ug).
При дальнейшем вращении вперед выключается датчик 2 (фиг. 2а, вперед. U2 - в результате включается элемент 7 и выключается элемент 8; включение элемента 7 приводит к включению элемента 6, которое происходит с запаздыванием по отношению к выключению элемента 8 (фиг. 2а, вперед, U. Ue, Us), поэтому единичные сигналы Ue и Ue на входах элемента 9 2ИЛИ-НЕ во
времени не перекрываются и на его выходе генерируется импульс. На этом цикл переключения датчиков 1 и 2 заканчивается и схема возвращается в исходное состояние.
При вращении назад из исходного состояния сначала включается датчик 2 (фиг. 2а, назад, иг) - в результате выключается элемент 7 и включается элемент 8; выключение элемента 7 приводит к выключению
элемента 6, которое происходит с запаздыванием по отношению к включению элемента 8 (фиг. 2а, назад, U, U, Ue), поэтому единичные сигналы Ue и Ue на входах элемента 9 2ИЛИ-НЕ во времени перекрываются и на выходе элемента 9 сохраняется нулевой сигнал.
При дальнейшем вращении назад включается датчик 1 (фиг. 2а, назад, Ut) - в результате включаются элементы 5 и 6;
включение элемента 5 приводит к выключению элемента 8, которое происходит с за- паздыванием по отношению к включению элемента 5 (фиг. 2а, назад. Us, Ue. Us), поэтому единичные сигналы Ue и Us на входах
элемента 9 2ИЛИ-НЕ во времени перекрываются и на его выходе сохраняется нулевой сигнал (фиг, 2а. назад. Ue, Ue, Us).
При дальнейшем вращении назад выключается датчик 2 (фиг. 2а. назад, Uz) - в
результате включаются элементы 7 и 8; включение элемента 7 приводит к выключению элемента 6, которое происходит с запаздыванием по отношению к включению элемента 8 (фиг. 2а, назад, U, Ue, Ue), поэтому единичные сигналы Об и Ue на входах элемента 9 2ИЛИ-НЕ во времени перекрываются и на его выходе сохраняется нулевой сигнал (фиг. 2а. назад, Ue. Ue. Ug).
При дальнейшем вращении назад вы-.
кдючается датчик 1 (фиг. 2а, назад, Ut) - в результате выключается элемент 5 и включается элемент 6; выключение элемента 5 приводит к выключению элемента 8, которое происходит с запаздыванием по отношению к включению элемента 6 (фиг. 2а. Us.
Ue. Ue). поэтому единичные сигналы Ue и Ue на входах элемента 9 2ИЛИ-НЕ во времени перекрываются и на его выходе сохраняется нулевой сигнал (фиг. 2а, назад, Ue. Ue. Ug).
На этом цикл переключений датчиков 1, 2 заканчивается и схема возвращается в исходное состояние.
Т.о. при подаче на управляющий вход Вх.Г нулевого сигнала, а на вход Вх.2
единичного, выходной сигнал первого датчика не инвертируется - элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 5 работает повторителем, а выходной сигнал датчика 2 инвертируется - элемент 7 ИСКЛЮЧАЮЩЕЕ ИЛИ работает
инвертором - в результате узел 3 регистрирует направление вращения вперед и не регистрирурет направление вращения назад.
При изменении управляющих сигналов (их инвертировании), когда на вход Вх.1 подан единичный, а на вход Вых.2 - нулевой сигналы инвертором работает элемент 5, а элемент 7 работает повторителем, При этом инвертируется сигнал датчика 1. Временные диаграммы работы узла 3 для этого случая приведены на фиг. 26. В исходном состоянии (момент времени to, фиг. 2) датчики 1 и 2 выключены, выходные сигналы Us и Ue элементов 5 и 8 единичные, выходные сигналы Uy, Ue и Ug элементов 7, 6, 9 нуле- вые.
При вращении вперед сначала включается датчик 1 (фиг 26, вперед, Ui)- в результате выключается элемент 5 и включается элемент 6 (фиг, 26, вперед. Us. Ue); выключе- ние элемента 5 вызывает выключение элемента 8, которое происходит с запаздыванием по отношению к включению элемента 6 (фиг. 26, вперед, Us, Ue, Us), поэтому единичные сигналы Ue и Us на входах эле- мента 9 2ИЛИ-НЕ во времени перекрываются и на его выходе сохраняется нулевой сигнал (фиг. 26, вперед, Ue, Ue. Ug).
При дальнейшем еращении вперед включается датчик 2 (фиг. 26, вперед, Ua - в результате включаются элементы 7 и 8, включение элемента 7 приводит к выключению элемента 6, которое происходит с за- паздывани м по отношению к включению элемента 8 (фиг, 25, вперед, U, Us, Ue). поэтому единичные сигналы Ue и Ue на входах элемента 9 2ИЛИ-НЕ во времени перекрываются и на его выходе Вых.1 сохраняется нулевой сигнал (фиг. 26, вперед, Ue, Us, Ug).
При дальнейшем вращении вперед выключается датчик 1 (фиг. 26, вперед, Ui - в результате включаются элементы 5 и 6. включение элемента 5 приводит к выключению элемента 8, причем с запаздыванием по отношению к включению элемента 6 (фиг. 26. вперед. Us, Ue, Us), поэтому единичные сигналы Ue и Us на входах элемента 9 2ИЛИ-ИЕ во времени перекрываются и на его выходе сохраняется нулевой сигнал (фиг. 26, вперед, Ue, Ue, Ug).
При дальнейшем вращении Ъперед выключается датчик 2 (фиг. 26, вперед, U2 - в результате выключается элемент 7 и включается элемент 8, выключение элемента 7 приводит к выключению элемента 6, причем с запаздыванием по отношению к включению элемента 8 (фиг. 26, вперед, U, Ue, Us), поэтому единичные сигналы Ue и Us на входах элемента 9 2ИЛИ-НЕ во времени перекрываются и на его выходе сохраняется нулевой сигнал (фиг. 26. вперед, Ue, Ue. Ug). На этом цикл переключения датчиков 1 и 2 заканчивается и схема возвращается в исходное состояние.
При вращении назад из исходного состояния сначала включается датчик 2 (фиг, 26, назад, U) - в результате включается элемент 7 и выключается элемент8 (фиг. 26, назад, U, Us); включение элемента 7 приводит к включению элемента б, которое происходит с запаздыванием по отношению к выключению элемента 8 (фиг. 26, назад, U, Us, Ue), поэтому единичные сигналы Ue и Us на входах элемента 92ИЛИ-НЕ во времени не перекрываются и в результате на его выходе генерируется импульс (фиг. 26, назад. Ue, Us. Ug).
При дальнейшем вращении назад включается датчик 1 (фиг. 26, назад, Ui) - в результате выключаются элементы 5 и 6 (фиг. 26. назад, Us. Ue); выключение элемента 5 приводит к включению элемента 8, которое происходит с запаздыванием по отношению к включению элемента 6 (фиг. 26, назад, Us. Ue, Us), поэтому единичные сигналы Ue и Us на входах элемента 9 2ИЛИ-НЕ во времени не перекрываются и на его выходе генерируется импульс (фиг, 26, назад, Ue, Us, Ug).
При дальнейшем вращении назад выключается датчик 2 (фиг. 26, назад, Ua) в результате выключаются элементы 7 и 8 (фиг. 26, назад, ); выключение элемента 7 приводит к включению элемента б. которое происходит с запаздыванием по отношению к выключению элемента 8 (фиг. 2 U, Ue, Ue), поэтому единичные сигналы Ue и Ue на входах элемента 9 2ИЛИ-НЕ во времени не перекрываются и на его выходе генерируется импульс (фиг. 26, Ue, Ue, Ug).
При дальнейшем вращении назад выключается датчик 1 (фиг. 26, назад, Ui) - в результате включается элемент 5 и выключается элемент 6 (фиг. 26. назад, Us, Ue); включение элемента 5 вызывает включение элемента 8, которое происходит с запаздыванием по отношению к выключению элемента б (фиг. 26, назад, Us, Ue. Ue), поэтому единичные сигналы на входах элемента 9 2ИЛИ-НЕ во времени не перекрываются и на его выходе генерируется импульс. На этом цикл переключений датчиков 1 и 2 заканчивается, схема возвращается в исходное состояние и при дальнейшем вращении все процессы повторяются.
Т.о. при инвертировании сигнала датчика 1 узел 3 регистрирует направление вращения назад и не регистрирует направление вращения вперед. Для переключения узла с регистрации одного направления вращения на регистрацию противоположного направления вращения достаточно инвертировать парафазные сигналы управления на входах Вх.Г и Вх.2 устройства. Сигналы управления на узлы 3 и 4 подаются перекрестно, т.е. так, что если в узле 3 инвертируется сигнал датчика 1, то в узле 4 инвертируется сигнал датчика 2 и наоборот. В результате узлы 3 и 4 всегда регистрируют противоположные направления вращения и совместно образуют управляемое устройство для определения направления вращения.
При подаче синфазных управляющих сигналов, независимо нулевых или единичных, на входы управления Вх.Г и Вх.2 устройства оба узла 3 и 4 теряют функции регистрации какого-то выделенного направления вращения и регистрируют как направление вращения вперед, так и направление вращения назад, причем с вдвое меньшей разрешающей способностью (за цикл переключения датчиков 1 и 2 на выходах Вых. Г и Вых.2 генерируется по два импульса).
Формула изобретения Устройство для определения направления вращения, содержащее первый и второй импульсные датчики перемещения, установленные с перекрытием зон срабатывания, четыре элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, первые входы первого и четвертого из этих элементов соединены с выходом пер0
5
0
5
0
во го датчика, а первые входы второго и третьего элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соединены с выходом второго датчика, первый и второй элементы 2ИЛИ-НЕ, входы первого из которых соединены с выходами первого и второго элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, а входы второго элемента 2ИЛИ- НЕ соединены с выходами третьего и четвертого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, о т л и ч а ю щ е е с я тем, что, с целью расширения области применения за счет переключения режимов работы, в него дополнительно введены пятый, шестой, седьмой и восьмой элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, причем первые входы пятого и восьмого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соединены с выходом второго датчика, выходы пятого и восьмого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соединены со вторыми входами соответственно первого и четвертого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, первые входы шестого и седьмого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соединены с выходом первого датчика, вторые входы этих элементов соединены со вторыми входами соответственно восьмого и пятого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и образуют соот- ветственно первый и второй входы управления, выходы шестого и седьмого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соединены со вторыми входами соответственно второго и третьего элементов ИСКЛЮЧАЮЩЕЕ ИЛИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления вращения | 1988 |
|
SU1569720A1 |
| Устройство для определения направления вращения | 1984 |
|
SU1176253A1 |
| Устройство для определения направления вращения | 1985 |
|
SU1283660A1 |
| Устройство для определения направления вращения | 1984 |
|
SU1176252A1 |
| Устройство для определения направления вращения | 1989 |
|
SU1675784A1 |
| Устройство для определения направления вращения | 1987 |
|
SU1529126A1 |
| Устройство для контроля токового режима управляемого вентильного преобразователя | 1984 |
|
SU1229893A1 |
| Формирователь импульсов датчика положения | 1991 |
|
SU1836661A3 |
| Устройство для позиционного управления приводом перемещения объекта | 1987 |
|
SU1500993A2 |
| Устройство для управления двухтактным транзисторным инвертором | 1989 |
|
SU1644335A1 |
Изобретение относится к приборостроению. Цель изобретения - расширение области применения. Поставленная цель достигается за счет введения в схему устройства четырех элементов ИСКЛЮЧАЮЩЕЕ ИЛИ и двух входов управления, и , которые позволяют установить два режима работы устройства, отличающееся тем, что для одного режима направлением вращения вперед является вращение по часовой стрелке, а для другого против часовой стрелки.2 ил.
вих.1
8oiY.2
#перед
а) им-„о, им-
ShepedнаЗа.9
S) (Ш-.Г, и 2-„он Фие. 2.
назад
| Устройство для определения направления вращения | 1988 |
|
SU1569720A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
