47V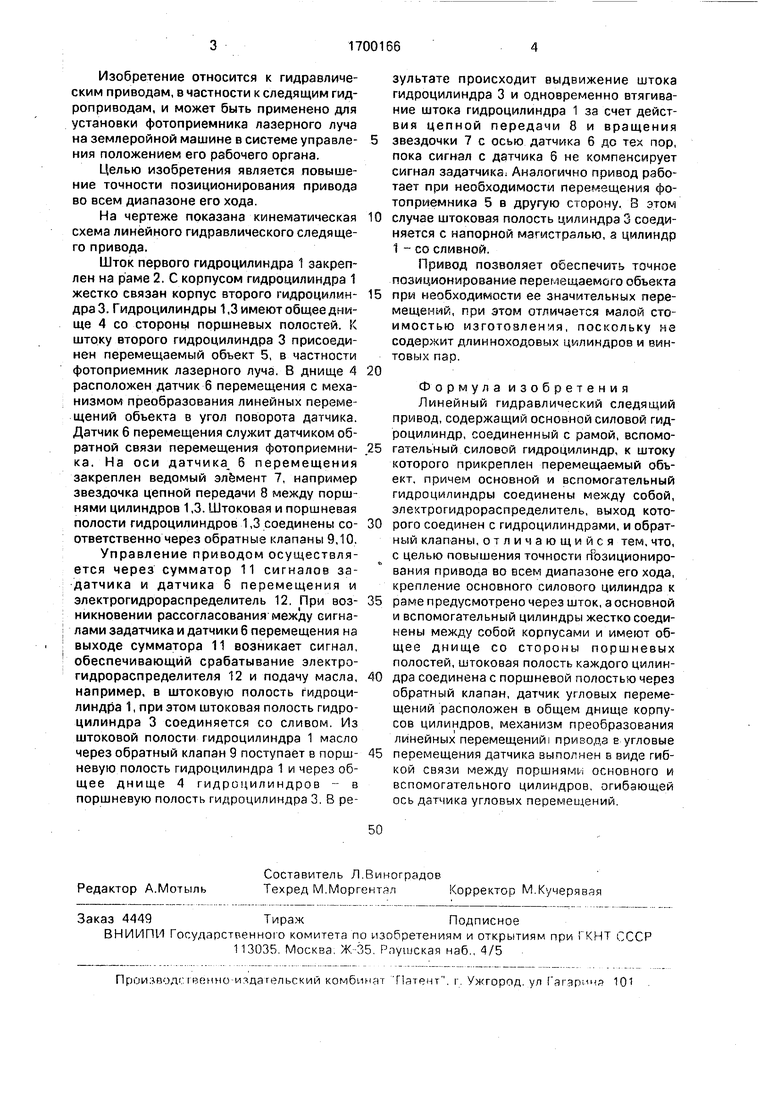
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСИСТЕМА | 2014 |
|
RU2591373C2 |
| Кабелеукладчик | 1988 |
|
SU1564287A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2667418C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2748156C1 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ НАЖИМНЫМ УСТРОЙСТВОМ КЛЕТИ ПРОКАТНОГО СТАНА | 2008 |
|
RU2381851C1 |
| Машина для рытья траншей | 1979 |
|
SU829825A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| ГИДРОСИСТЕМА | 1992 |
|
RU2046893C1 |
| Камнерезная машина | 1986 |
|
SU1434111A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ЗЕМЛЕРОЙНО-ТРАНСПОРТНЫХ МАШИН КОВШОВОГО ТИПА | 2010 |
|
RU2437989C1 |
Изобретение относится к гидравлическим приводам мачты для установки фотоприемника на землеройной машине. Целью изобретения - повышение точности позиционирования привода во всем диапазоне его хода. Привод содержит два силовых гидро- цилиндра (ГЦ) 1,3, коепящиеся к раме 2. На штоке одного из них предусмотрено крепление перемещаемого объекта 5, а шток другого крепится к раме 2. Корпусы ГЦ 1,3 соединены между собой и имеют расположенное со стороны поошневых полостей общее днище 4, к которому крепится датчик угловых перемеаюним (ДУП) 6. Преобразование линейных перемещений привода в у ог, поворота ДУП 6 реализован в виде гибкой связи между поршнями обоих ГЦ 1,3, огибающей ведомый элемент, жестко связанный с осью ДУП 6 Управление ГЦ 1,3 осуществляется от гидрораспределителя 12. При возникновении разногласия между сигналом ДУП 6 и задатчика штоки ГЦ 1,3 перемещаются и перемещают фотоприемник. 1 ил. SSjTSbf со С
П
L
Задатщка
Изобретение относится к гидравлическим приводам, в частности к следящим гидроприводам, и может быть применено для установки фотоприемника лазерного луча на землеройной машине в системе управления положением его рабочего органа.
Целью изобретения является повышение точности позиционирования привода во всем диапазоне его хода
На чертеже показана кинематическая схема линейного гидравлического следящего привода.
Шток первого гидроциликдра 1 закреплен на раме 2. С корпусом гидроцилиндра 1 жестко связан корпус второго гидроцилмч- драЗ. Гидроцилиндры 1,3 имеют общее днище 4 со стороны поршневых полостей. К штоку второго гидроцилиндра 3 присоединен перемещаемый объект 5, в частности фотоприемник лазерного луча. В днище 4 расположен датчик 6 перемещения с механизмом преобразования линейных перемещений объекта в угол поворота датчика. Датчик 6 перемещения служит датчиком обратной связи перемещения фотоприемника. На оси датчика 6 перемещения закреплен ведомый элемент 7, например звездочка цепной передачи 8 между поршнями цилиндров 1,3. Штоковая и поршневая полости гидроцилиндров 1,3 соединены соответственно через обратные клапаны 9,10 Управление приводом осуществляется через сумматор 11 сигналов за- датчика и датчика 6 перемещения и электрогидрораспределитель 12 При возникновении рассогласования между сигналами задатчика и датчики б перемещения на выходе сумматора 11 возникает сигнал, обеспечивающий срабатывание электро- гидрораспределителя 12 и подачу масла, например, в штоковую полость гидроцилиндра 1, при этом штоковая полость гидроцилиндра 3 соединяется со сливом Из штоковой полости гидроцилиндра 1 масло через обратный клапан 9 поступает в поршневую полость гидроцилиндра 1 и через общее днище 4 гидроцилиндров - в поршневую полость гидроцилиндра 3 В ре
зультате происходит выдвижение штока гидроцилиндра 3 и одновременно втягивание штока гидроцилиндра 1 за счет действия цепной передачи 8 и вращения
звездочки 7 с осью датчика 6 до тех пор, пока сигнал с датчика 6 не компенсирует сигнал задатчика Аналогично привод работает при необходимости перемещения фотоприемника 5 в другую сторону. В этом
0 случае штоковая полость цилиндра 3 соединяется с напорной магистралью, а цилиндр 1 - со сливной.
Привод позволяет обеспечить точное позиционирование перемещаемого объекта
5 при необходимости ее значительных перемещений, при этом отличается малой стоимостью изготозлен ля, поскольку не содержит длинноходовых цилиндров и винтовых пао
0
Формула изобретения Линейный гидравлический следящий привод, содержащий основной силовой гидроцилиндр, соединенный с рамой, вспомо5 гательный силовой гидроцилиндр, к штоку которого прикреплен перемещаемый объект, причем основной и вспомогательный гидроцилиндры соединены между собой, элечтрогидрораспределитель, выход кото0 рого соединен с гидроцилиндрами, и обратный клапаны, отличающийся тем, что, с целью повышения точности Позиционирования привода во всем диапазоне его хода, крепление основного силового цилиндра к
5 раме предусмотрено через шток, а основной и вспомогательный цилиндры жестко соединены между собой корпусами и имеют общее днище со стороны поршневых полостей, штоковая полость каждого цилин0 дра соединена с поршневой полостью через обратный клапан, датчик угловых перемещений расположен в общем днище корпусов цилиндров, механизм преобразования линейных перемещений привода е угловые
5 перемещения датчика выполнен Б виде гибкой связи между поршнями основного и вспомогательного цилиндров огибающей ось датчика угловых перемещений
| В.К.Свешников и другие | |||
| Станочные гидроприводы.-М.: Машиностроение, 1988, с | |||
| Катодное реле | 1921 |
|
SU250A1 |
| Там же, с | |||
| Железнодорожный снегоочиститель на глубину до трех сажен | 1920 |
|
SU263A1 |
